Sampling-Based Motion Planning with Online Racing Line Generation for Autonomous Driving on Three-Dimensional Race Tracks
2403.18643
0
0
🛸
Abstract
Existing approaches to trajectory planning for autonomous racing employ sampling-based methods, generating numerous jerk-optimal trajectories and selecting the most favorable feasible trajectory based on a cost function penalizing deviations from an offline-calculated racing line. While successful on oval tracks, these methods face limitations on complex circuits due to the simplistic geometry of jerk-optimal edges failing to capture the complexity of the racing line. Additionally, they only consider two-dimensional tracks, potentially neglecting or surpassing the actual dynamic potential. In this paper, we present a sampling-based local trajectory planning approach for autonomous racing that can maintain the lap time of the racing line even on complex race tracks and consider the race track's three-dimensional effects. In simulative experiments, we demonstrate that our approach achieves lower lap times and improved utilization of dynamic limits compared to existing approaches. We also investigate the impact of online racing line generation, in which the time-optimal solution is planned from the current vehicle state for a limited spatial horizon, in contrast to a closed racing line calculated offline. We show that combining the sampling-based planner with the online racing line generation can significantly reduce lap times in multi-vehicle scenarios.
Create account to get full access
Overview
- Existing trajectory planning methods for autonomous racing have limitations on complex race tracks
- They generate numerous jerk-optimal trajectories and select the most feasible one based on a cost function
- These methods neglect the complexity of the racing line and the 3D effects of the race track
- This paper presents a sampling-based local trajectory planning approach that can maintain the lap time on complex tracks and consider 3D effects
Plain English Explanation
The paper discusses a new approach to trajectory planning for autonomous racing. Existing methods generate many potential trajectories and pick the best one based on factors like how closely it follows an ideal racing line. However, these methods struggle on complex race tracks because the trajectories they generate don't fully capture the complexity of the actual optimal racing line. They also only consider the 2D track, rather than the full 3D effects of the track.
The researchers present a new sampling-based local trajectory planning approach that can maintain the lap time even on complex tracks and take the 3D track into account. In simulations, they show this approach achieves faster lap times and better utilizes the vehicle's dynamic limits compared to existing methods.
The paper also explores using an online racing line generation approach, where the optimal trajectory is planned from the current vehicle state for a limited distance, rather than relying on a pre-calculated racing line. They find that combining this with the sampling-based planner can significantly reduce lap times in multi-vehicle scenarios.
Technical Explanation
The paper presents a sampling-based local trajectory planning approach for autonomous racing that can maintain the lap time on complex race tracks and consider the 3D effects of the track.
Existing approaches generate numerous jerk-optimal trajectories and select the most favorable feasible trajectory based on a cost function. While successful on oval tracks, these methods face limitations on complex circuits due to the simplistic geometry of jerk-optimal edges failing to capture the complexity of the racing line. Additionally, they only consider two-dimensional tracks, potentially neglecting or surpassing the actual dynamic potential.
The researchers' approach uses a sampling-based planner that can generate trajectories that better match the 3D complexity of the racing line. In simulative experiments, they demonstrate that this approach achieves lower lap times and improved utilization of dynamic limits compared to existing methods.
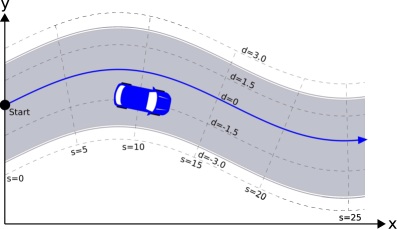
The paper also investigates the impact of online racing line generation, where the time-optimal solution is planned from the current vehicle state for a limited spatial horizon, in contrast to a closed racing line calculated offline. They show that combining the sampling-based planner with the online racing line generation can significantly reduce lap times in multi-vehicle scenarios.
Critical Analysis
The paper presents a novel approach to trajectory planning for autonomous racing that addresses the limitations of existing methods. The researchers have demonstrated the effectiveness of their approach through simulative experiments, showing improved lap times and dynamic limit utilization.
However, the paper does not provide a thorough discussion of the potential limitations or caveats of the proposed method. For example, the computational complexity of the sampling-based planner and its scalability to real-world race tracks with more complex geometries and obstacles could be further explored.
Additionally, the paper does not address how the proposed approach would perform in real-world conditions, such as dealing with environmental uncertainties, sensor noise, and other practical challenges that autonomous racing systems would face. Validating the approach on physical test platforms or in more realistic simulations could help strengthen the claims made in the paper.
Further research could also investigate the robustness of the online racing line generation approach, particularly in scenarios with multiple vehicles or dynamic obstacles, and how it compares to other trajectory planning techniques for autonomous driving.
Conclusion
This paper presents a novel sampling-based local trajectory planning approach for autonomous racing that can maintain the lap time on complex race tracks and consider the 3D effects of the track. Through simulative experiments, the researchers have demonstrated that their approach achieves lower lap times and improved utilization of dynamic limits compared to existing methods.
The paper also explores the benefits of combining the sampling-based planner with an online racing line generation approach, which can significantly reduce lap times in multi-vehicle scenarios. This research represents an important step forward in developing more capable and efficient autonomous racing systems that can navigate complex race tracks and push the limits of vehicle dynamics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Trajectory Planning using Reinforcement Learning for Interactive Overtaking Maneuvers in Autonomous Racing Scenarios
Levent Ogretmen, Mo Chen, Phillip Pitschi, Boris Lohmann
0
0
Conventional trajectory planning approaches for autonomous racing are based on the sequential execution of prediction of the opposing vehicles and subsequent trajectory planning for the ego vehicle. If the opposing vehicles do not react to the ego vehicle, they can be predicted accurately. However, if there is interaction between the vehicles, the prediction loses its validity. For high interaction, instead of a planning approach that reacts exclusively to the fixed prediction, a trajectory planning approach is required that incorporates the interaction with the opposing vehicles. This paper demonstrates the limitations of a widely used conventional sampling-based approach within a highly interactive blocking scenario. We show that high success rates are achieved for less aggressive blocking behavior but that the collision rate increases with more significant interaction. We further propose a novel Reinforcement Learning (RL)-based trajectory planning approach for racing that explicitly exploits the interaction with the opposing vehicle without requiring a prediction. In contrast to the conventional approach, the RL-based approach achieves high success rates even for aggressive blocking behavior. Furthermore, we propose a novel safety layer (SL) that intervenes when the trajectory generated by the RL-based approach is infeasible. In that event, the SL generates a sub-optimal but feasible trajectory, avoiding termination of the scenario due to a not found valid solution.
4/17/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
0
0
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
4/19/2024
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
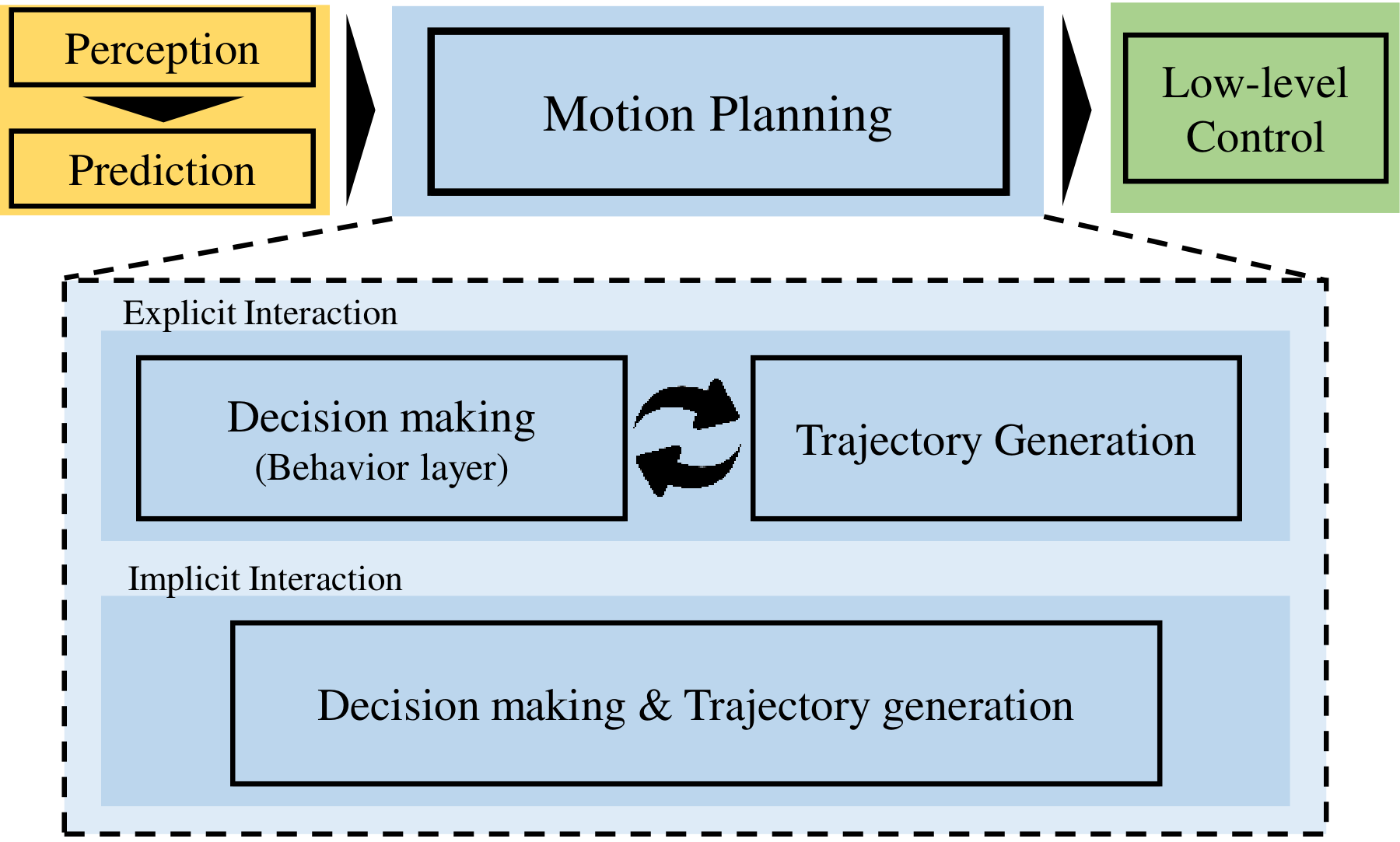
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024