False Positive Sampling-based Data Augmentation for Enhanced 3D Object Detection Accuracy

0
Sign in to get full access
Overview
- This paper proposes a novel data augmentation technique called False Positive Sampling (FPS) to enhance the accuracy of 3D object detection models.
- The key idea is to augment the training data with false positive detections, which can help the model better distinguish between true and false objects.
- The authors demonstrate the effectiveness of FPS on several popular 3D object detection benchmarks, achieving significant performance improvements over baseline models.
Plain English Explanation
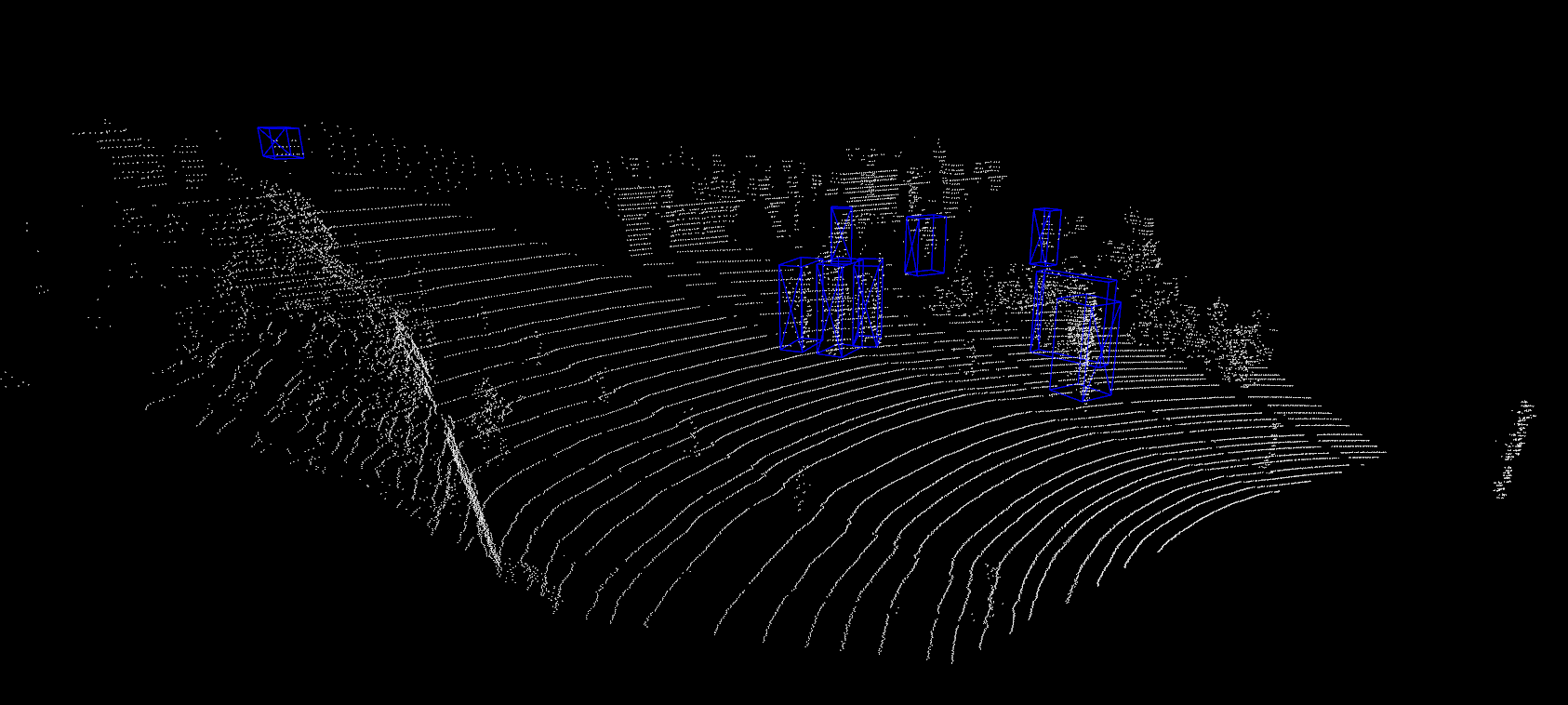
3D object detection is a crucial task in fields like autonomous driving and robotics, where accurately identifying objects in 3D space is essential. However, 3D object detection models can sometimes make mistakes, identifying objects that aren't actually there (false positives).
The researchers behind this paper came up with a clever way to address this issue. They developed a technique called False Positive Sampling (FPS), which augments the training data for 3D object detection models with these false positive detections.
The idea is that by exposing the model to more examples of false positives during training, it will learn to better distinguish between real objects and false detections. This can lead to significant improvements in the overall accuracy of the 3D object detection system.
The researchers tested their FPS approach on several popular 3D object detection benchmarks and found that it consistently outperformed standard training techniques. This suggests that FPS could be a valuable tool for enhancing the performance of 3D object detection models in real-world applications.
Technical Explanation
The paper introduces a novel data augmentation technique called False Positive Sampling (FPS) to improve the accuracy of 3D object detection models. The key insight is that by augmenting the training data with false positive detections, the model can learn to better distinguish between true and false objects, leading to enhanced overall performance.
The FPS approach works as follows:
- The researchers first train a baseline 3D object detection model using standard techniques.
- They then run this baseline model on the training data, collecting the false positive detections.
- Finally, they add these false positive samples to the original training data, creating an augmented dataset that is used to fine-tune the 3D object detection model.
The authors evaluate the FPS approach on several popular 3D object detection benchmarks, including AVSI-Net, Sparse-to-Dense, and Reliable Student. They demonstrate that the FPS-augmented models consistently outperform the baseline models, achieving significant performance improvements on various metrics.
The authors also provide a detailed analysis of the impact of FPS on different object categories, showing that it is particularly effective for improving the detection of smaller and harder-to-detect objects.
Critical Analysis
The FPS approach proposed in this paper is a promising technique for enhancing the accuracy of 3D object detection models. By explicitly addressing the issue of false positives, the authors have demonstrated a straightforward yet effective way to improve model performance.
One potential limitation of the FPS approach is that it relies on the availability of a relatively accurate baseline 3D object detection model. If the initial model is not performing well, the false positive detections it generates may not be representative of the actual challenges faced by the model. This could limit the effectiveness of the FPS technique.
Additionally, the paper does not explore the impact of FPS on the model's ability to generalize to unseen data. It would be valuable to investigate how the FPS-augmented models perform on out-of-distribution samples or in real-world deployment scenarios.
Despite these potential caveats, the overall results presented in the paper are compelling and suggest that FPS could be a valuable addition to the toolbox of 3D object detection researchers and practitioners. As the field continues to evolve, techniques like FPS that address specific challenges in model performance will likely become increasingly important.
Conclusion
This paper introduces a novel data augmentation technique called False Positive Sampling (FPS) that can significantly enhance the accuracy of 3D object detection models. By augmenting the training data with false positive detections, the FPS approach helps the model better distinguish between true and false objects, leading to substantial performance improvements on several 3D object detection benchmarks.
The simplicity and effectiveness of the FPS technique make it a promising addition to the arsenal of techniques for improving 3D object detection, a critical capability in fields like autonomous driving and robotics. As the demands for accurate 3D perception continue to grow, innovative approaches like FPS will likely play an increasingly important role in advancing the state of the art in this important research area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
False Positive Sampling-based Data Augmentation for Enhanced 3D Object Detection Accuracy
Jiyong Oh, Junhaeng Lee, Woongchan Byun, Minsang Kong, Sang Hun Lee
Recent studies have focused on enhancing the performance of 3D object detection models. Among various approaches, ground-truth sampling has been proposed as an augmentation technique to address the challenges posed by limited ground-truth data. However, an inherent issue with ground-truth sampling is its tendency to increase false positives. Therefore, this study aims to overcome the limitations of ground-truth sampling and improve the performance of 3D object detection models by developing a new augmentation technique called false-positive sampling. False-positive sampling involves retraining the model using point clouds that are identified as false positives in the model's predictions. We propose an algorithm that utilizes both ground-truth and false-positive sampling and an algorithm for building the false-positive sample database. Additionally, we analyze the principles behind the performance enhancement due to false-positive sampling. Our experiments demonstrate that models utilizing false-positive sampling show a reduction in false positives and exhibit improved object detection performance. On the KITTI and Waymo Open datasets, models with false-positive sampling surpass the baseline models by a large margin.
Read more5/21/2024

0
Enhancing Sampling Protocol for Robust Point Cloud Classification
Chongshou Li, Pin Tang, Xinke Li, Tianrui Li
Established sampling protocols for 3D point cloud learning, such as Farthest Point Sampling (FPS) and Fixed Sample Size (FSS), have long been recognized and utilized. However, real-world data often suffer from corrputions such as sensor noise, which violates the benignness assumption of point cloud in current protocols. Consequently, they are notably vulnerable to noise, posing significant safety risks in critical applications like autonomous driving. To address these issues, we propose an enhanced point cloud sampling protocol, PointDR, which comprises two components: 1) Downsampling for key point identification and 2) Resampling for flexible sample size. Furthermore, differentiated strategies are implemented for training and inference processes. Particularly, an isolation-rated weight considering local density is designed for the downsampling method, assisting it in performing random key points selection in the training phase and bypassing noise in the inference phase. A local-geometry-preserved upsampling is incorporated into resampling, facilitating it to maintain a stochastic sample size in the training stage and complete insufficient data in the inference. It is crucial to note that the proposed protocol is free of model architecture altering and extra learning, thus minimal efforts are demanded for its replacement of the existing one. Despite the simplicity, it substantially improves the robustness of point cloud learning, showcased by outperforming the state-of-the-art methods on multiple benchmarks of corrupted point cloud classification. The code will be available upon the paper's acceptance.
Read more8/23/2024
📊
0
Advancements in Point Cloud Data Augmentation for Deep Learning: A Survey
Qinfeng Zhu, Lei Fan, Ningxin Weng
Deep learning (DL) has become one of the mainstream and effective methods for point cloud analysis tasks such as detection, segmentation and classification. To reduce overfitting during training DL models and improve model performance especially when the amount and/or diversity of training data are limited, augmentation is often crucial. Although various point cloud data augmentation methods have been widely used in different point cloud processing tasks, there are currently no published systematic surveys or reviews of these methods. Therefore, this article surveys these methods, categorizing them into a taxonomy framework that comprises basic and specialized point cloud data augmentation methods. Through a comprehensive evaluation of these augmentation methods, this article identifies their potentials and limitations, serving as a useful reference for choosing appropriate augmentation methods. In addition, potential directions for future research are recommended. This survey contributes to providing a holistic overview of the current state of point cloud data augmentation, promoting its wider application and development.
Read more4/24/2024
0
Boosting 3D Object Detection with Semantic-Aware Multi-Branch Framework
Hao Jing, Anhong Wang, Lijun Zhao, Yakun Yang, Donghan Bu, Jing Zhang, Yifan Zhang, Junhui Hou
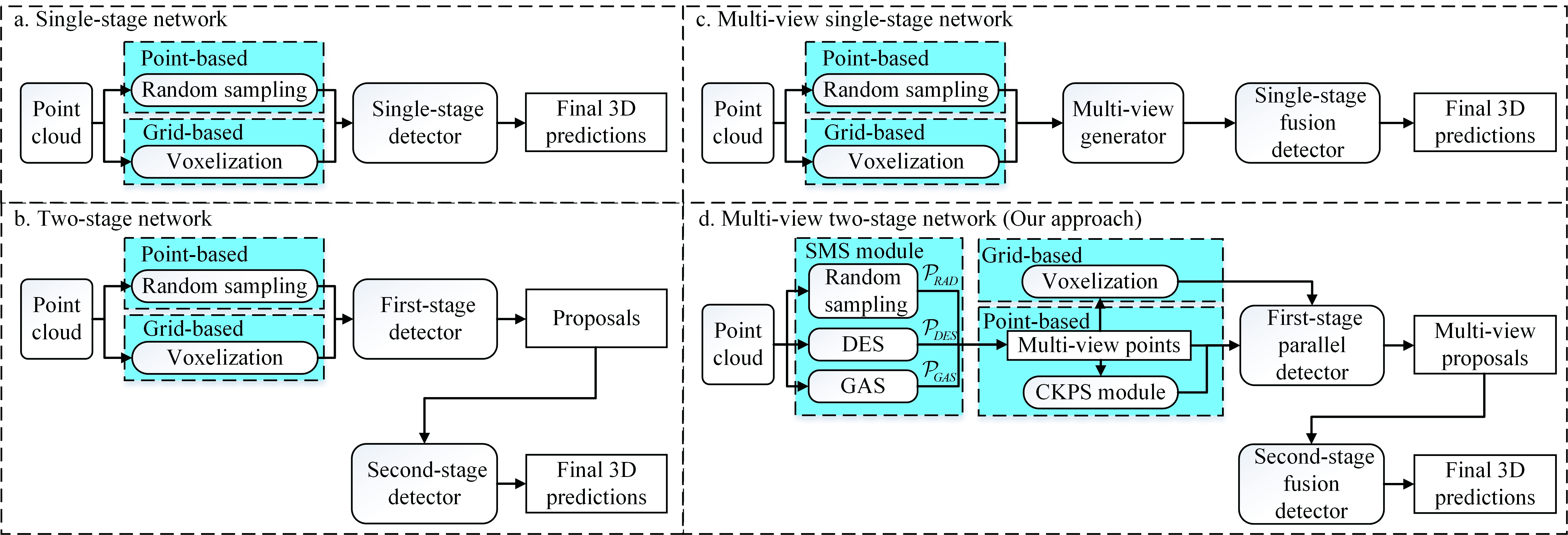
In autonomous driving, LiDAR sensors are vital for acquiring 3D point clouds, providing reliable geometric information. However, traditional sampling methods of preprocessing often ignore semantic features, leading to detail loss and ground point interference in 3D object detection. To address this, we propose a multi-branch two-stage 3D object detection framework using a Semantic-aware Multi-branch Sampling (SMS) module and multi-view consistency constraints. The SMS module includes random sampling, Density Equalization Sampling (DES) for enhancing distant objects, and Ground Abandonment Sampling (GAS) to focus on non-ground points. The sampled multi-view points are processed through a Consistent KeyPoint Selection (CKPS) module to generate consistent keypoint masks for efficient proposal sampling. The first-stage detector uses multi-branch parallel learning with multi-view consistency loss for feature aggregation, while the second-stage detector fuses multi-view data through a Multi-View Fusion Pooling (MVFP) module to precisely predict 3D objects. The experimental results on KITTI 3D object detection benchmark dataset show that our method achieves excellent detection performance improvement for a variety of backbones, especially for low-performance backbones with the simple network structures.
Read more7/9/2024