Fast Learning of Signed Distance Functions from Noisy Point Clouds via Noise to Noise Mapping

0
Sign in to get full access
Overview
- This paper presents a novel approach for fast learning of signed distance functions (SDFs) from noisy point cloud data.
- The key innovation is a "noise-to-noise" mapping technique that allows the model to learn a denoised SDF representation directly from noisy inputs.
- The proposed method is shown to outperform prior work in terms of reconstruction quality and computational efficiency.
Plain English Explanation
In this paper, the researchers developed a new way to quickly learn Signed Distance Functions (SDFs) from noisy point cloud data. SDFs are a powerful representation used in surface reconstruction and other 3D computer vision tasks.
The key insight is a "noise-to-noise" mapping technique, where the model learns to directly predict a denoised SDF from noisy input data, without requiring any clean ground truth. This allows the model to be trained more efficiently compared to prior approaches that relied on clean SDF data.
The researchers showed that their method can produce high-quality SDF reconstructions faster than previous techniques. This is an important advance, as efficient SDF learning enables many real-world applications like 3D scene understanding and robotic navigation.
Technical Explanation
The paper presents a novel "noise-to-noise" mapping technique for learning signed distance functions (SDFs) from noisy point cloud data. The core idea is to train a neural network to directly predict a denoised SDF representation from the input noisy point cloud, without requiring any clean ground truth SDF data.
The authors leverage recent advances in self-supervised learning to enable this noise-to-noise training approach. Specifically, they introduce a custom neural network architecture and loss function that encourages the model to learn a consistent SDF mapping even in the presence of noise.
Experiments on several benchmark datasets show that the proposed method can achieve state-of-the-art reconstruction quality, while being significantly more computationally efficient compared to prior SDF learning approaches. The authors attribute this performance boost to the noise-to-noise training strategy, which allows the model to learn more robust SDF representations.
Critical Analysis
The paper presents a compelling approach for fast learning of signed distance functions from noisy point clouds. The noise-to-noise mapping technique is a clever innovation that addresses a key challenge in prior SDF learning methods - the need for clean ground truth data.
However, the paper does not provide a deep analysis of the method's limitations or potential failure cases. For example, it's unclear how the approach would scale to very large or highly complex point cloud datasets, or how sensitive it is to different types and levels of noise.
Additionally, the authors do not discuss potential trade-offs or design choices in their network architecture and training procedure. Exploring these aspects could provide valuable insights for researchers looking to build upon this work.
Overall, the paper makes a strong technical contribution, but would benefit from a more comprehensive critical examination of the proposed technique and its broader implications.
Conclusion
This paper introduces a novel "noise-to-noise" mapping approach for efficiently learning signed distance functions from noisy point cloud data. By allowing the model to directly predict denoised SDFs without relying on clean ground truth, the method achieves state-of-the-art reconstruction quality while being significantly more computationally efficient than prior techniques.
The noise-to-noise training strategy is a clever innovation that could have broader applications in other 3D computer vision tasks that rely on robust geometric representations. While the paper lacks a deep critical analysis, it represents an important advance in the field of fast and accurate surface reconstruction from sensor data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Fast Learning of Signed Distance Functions from Noisy Point Clouds via Noise to Noise Mapping
Junsheng Zhou, Baorui Ma, Yu-Shen Liu, Zhizhong Han
Learning signed distance functions (SDFs) from point clouds is an important task in 3D computer vision. However, without ground truth signed distances, point normals or clean point clouds, current methods still struggle from learning SDFs from noisy point clouds. To overcome this challenge, we propose to learn SDFs via a noise to noise mapping, which does not require any clean point cloud or ground truth supervision. Our novelty lies in the noise to noise mapping which can infer a highly accurate SDF of a single object or scene from its multiple or even single noisy observations. We achieve this by a novel loss which enables statistical reasoning on point clouds and maintains geometric consistency although point clouds are irregular, unordered and have no point correspondence among noisy observations. To accelerate training, we use multi-resolution hash encodings implemented in CUDA in our framework, which reduces our training time by a factor of ten, achieving convergence within one minute. We further introduce a novel schema to improve multi-view reconstruction by estimating SDFs as a prior. Our evaluations under widely-used benchmarks demonstrate our superiority over the state-of-the-art methods in surface reconstruction from point clouds or multi-view images, point cloud denoising and upsampling.
Read more7/22/2024
0
N$^{3}$-Mapping: Normal Guided Neural Non-Projective Signed Distance Fields for Large-scale 3D Mapping
Shuangfu Song, Junqiao Zhao, Kai Huang, Jiaye Lin, Chen Ye, Tiantian Feng
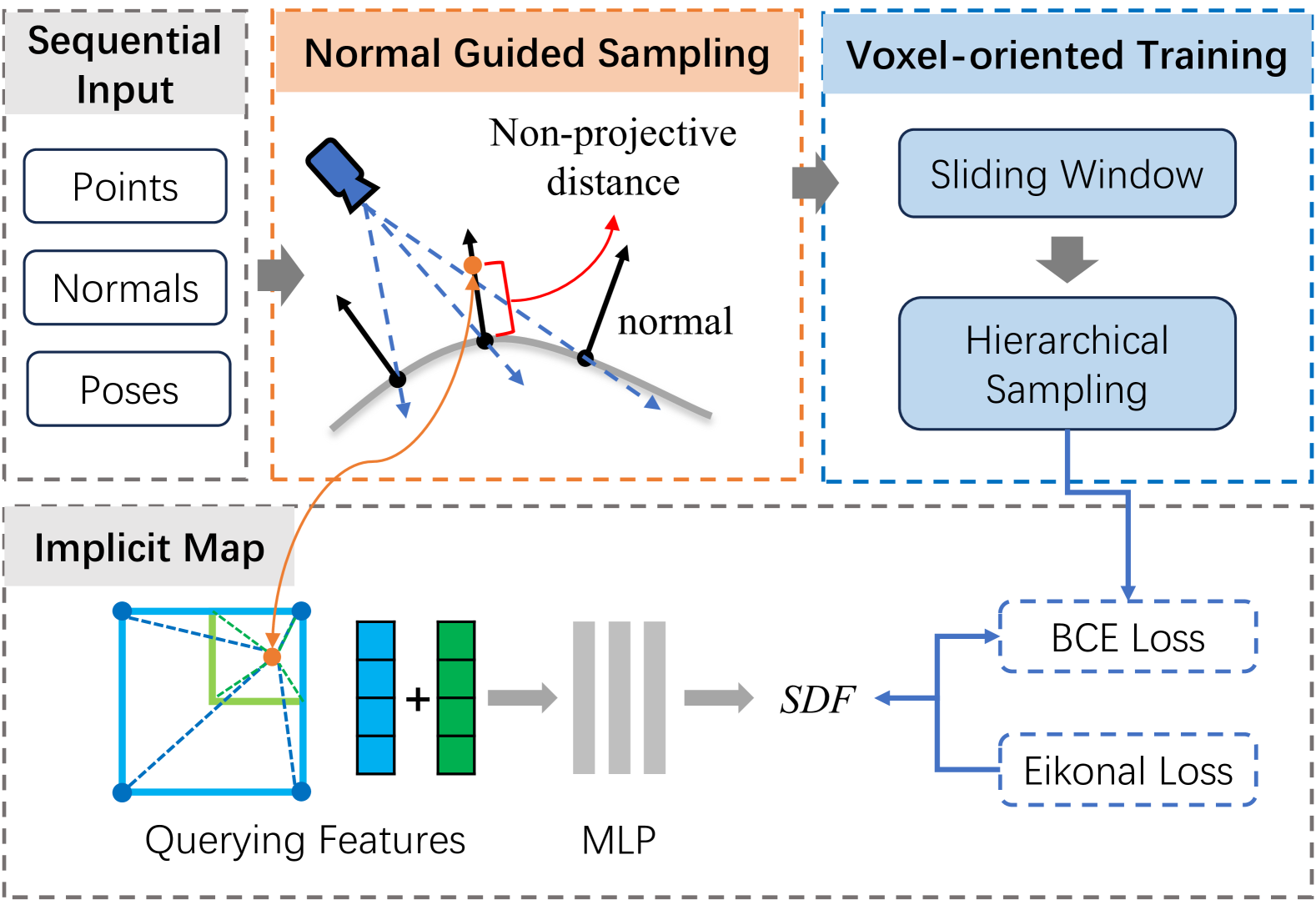
Accurate and dense mapping in large-scale environments is essential for various robot applications. Recently, implicit neural signed distance fields (SDFs) have shown promising advances in this task. However, most existing approaches employ projective distances from range data as SDF supervision, introducing approximation errors and thus degrading the mapping quality. To address this problem, we introduce N$^{3}$-Mapping, an implicit neural mapping system featuring normal-guided neural non-projective signed distance fields. Specifically, we directly sample points along the surface normal, instead of the ray, to obtain more accurate non-projective distance values from range data. Then these distance values are used as supervision to train the implicit map. For large-scale mapping, we apply a voxel-oriented sliding window mechanism to alleviate the forgetting issue with a bounded memory footprint. Besides, considering the uneven distribution of measured point clouds, a hierarchical sampling strategy is designed to improve training efficiency. Experiments demonstrate that our method effectively mitigates SDF approximation errors and achieves state-of-the-art mapping quality compared to existing approaches.
Read more4/30/2024

0
Implicit Filtering for Learning Neural Signed Distance Functions from 3D Point Clouds
Shengtao Li, Ge Gao, Yudong Liu, Ming Gu, Yu-Shen Liu
Neural signed distance functions (SDFs) have shown powerful ability in fitting the shape geometry. However, inferring continuous signed distance fields from discrete unoriented point clouds still remains a challenge. The neural network typically fits the shape with a rough surface and omits fine-grained geometric details such as shape edges and corners. In this paper, we propose a novel non-linear implicit filter to smooth the implicit field while preserving high-frequency geometry details. Our novelty lies in that we can filter the surface (zero level set) by the neighbor input points with gradients of the signed distance field. By moving the input raw point clouds along the gradient, our proposed implicit filtering can be extended to non-zero level sets to keep the promise consistency between different level sets, which consequently results in a better regularization of the zero level set. We conduct comprehensive experiments in surface reconstruction from objects and complex scene point clouds, the numerical and visual comparisons demonstrate our improvements over the state-of-the-art methods under the widely used benchmarks.
Read more9/11/2024

0
Unsupervised Occupancy Learning from Sparse Point Cloud
Amine Ouasfi, Adnane Boukhayma
Implicit Neural Representations have gained prominence as a powerful framework for capturing complex data modalities, encompassing a wide range from 3D shapes to images and audio. Within the realm of 3D shape representation, Neural Signed Distance Functions (SDF) have demonstrated remarkable potential in faithfully encoding intricate shape geometry. However, learning SDFs from 3D point clouds in the absence of ground truth supervision remains a very challenging task. In this paper, we propose a method to infer occupancy fields instead of SDFs as they are easier to learn from sparse inputs. We leverage a margin-based uncertainty measure to differentially sample from the decision boundary of the occupancy function and supervise the sampled boundary points using the input point cloud. We further stabilize the optimization process at the early stages of the training by biasing the occupancy function towards minimal entropy fields while maximizing its entropy at the input point cloud. Through extensive experiments and evaluations, we illustrate the efficacy of our proposed method, highlighting its capacity to improve implicit shape inference with respect to baselines and the state-of-the-art using synthetic and real data.
Read more4/4/2024