N$^{3}$-Mapping: Normal Guided Neural Non-Projective Signed Distance Fields for Large-scale 3D Mapping

0
Sign in to get full access
Overview
- This paper introduces a novel approach called "N³-Mapping" for large-scale 3D mapping using normal-guided neural non-projective signed distance fields.
- The method leverages normal information to improve the accuracy and scalability of 3D reconstruction from sparse point clouds.
- The authors demonstrate the effectiveness of N³-Mapping on various large-scale 3D mapping tasks, including outdoor scenes and indoor environments.
Plain English Explanation
The paper presents a new technique called "N³-Mapping" that aims to create detailed 3D maps from limited data. Traditional 3D mapping often relies on dense point clouds, which can be difficult and expensive to acquire, especially for large-scale environments. N³-Mapping addresses this challenge by using a neural network to efficiently reconstruct 3D surfaces from sparse point clouds.
The key innovation is the use of "normal" information, which describes the orientation of the surface at each point. By incorporating this normal data, the neural network can better understand the underlying 3D structure and generate more accurate and detailed reconstructions. This is particularly useful for mapping complex environments, such as buildings or outdoor landscapes, where sparse data may be all that is available.
The authors demonstrate the capabilities of N³-Mapping on a variety of 3D mapping tasks, showing that it can produce high-quality results even with limited input data. This could have important applications in fields like robotics, urban planning, and environmental monitoring, where efficient and cost-effective 3D mapping is essential.
Technical Explanation
The N³-Mapping approach builds upon previous work on Unsupervised Occupancy Learning from Sparse Point Cloud and LGSDF: Continual Global Learning of Signed Distance Fields, which used neural networks to reconstruct 3D surfaces from sparse point clouds. However, these methods relied solely on the position of the points, without leveraging additional information about the surface orientation.
N³-Mapping addresses this limitation by incorporating normal information into the reconstruction process. The authors use a neural network architecture that takes as input both the sparse point cloud and the corresponding surface normals, and outputs a signed distance field (SDF) representation of the 3D surface. The normal information helps the network better understand the local geometry of the surface, leading to more accurate and detailed reconstructions.
The authors also introduce a training strategy that allows the network to learn from large-scale datasets, enabling N³-Mapping to handle complex, real-world environments. This is demonstrated through experiments on outdoor scenes, as well as challenging indoor environments, where N³-Mapping outperforms previous state-of-the-art methods, such as Depth-Supervised Neural Surface Reconstruction from Airborne LiDAR and MonoPatchNeRF: Improving Neural Radiance Fields with Patch-based Training.
Critical Analysis
The authors acknowledge several limitations of the N³-Mapping approach. First, the method relies on the availability of surface normal information, which may not always be readily available or easy to estimate from sparse point clouds. The authors suggest that future work could explore ways to jointly learn the surface normals and the SDF representation, reducing the need for explicit normal data.
Additionally, the current N³-Mapping model is limited to static 3D scenes and does not handle dynamic or articulated objects. Extending the approach to handle more complex and changing environments would be an important area for future research, potentially building on techniques like NRDF: Neural Riemannian Distance Fields.
Finally, while the authors demonstrate impressive results on large-scale 3D mapping tasks, the computational and memory requirements of the neural network-based approach may limit its practical deployment in some real-world scenarios, particularly on resource-constrained platforms. Exploring ways to optimize the model's efficiency could broaden its applicability.
Conclusion
The N³-Mapping technique presented in this paper represents a significant advance in large-scale 3D mapping, leveraging normal information to improve the accuracy and scalability of neural network-based reconstruction from sparse point clouds. The authors have demonstrated the effectiveness of their approach on a range of challenging 3D mapping tasks, suggesting that N³-Mapping could have important applications in fields like robotics, urban planning, and environmental monitoring, where efficient and cost-effective 3D mapping is crucial. While the method has some limitations, the ideas and insights presented in this work could inspire further research towards even more robust and versatile 3D mapping solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
N$^{3}$-Mapping: Normal Guided Neural Non-Projective Signed Distance Fields for Large-scale 3D Mapping
Shuangfu Song, Junqiao Zhao, Kai Huang, Jiaye Lin, Chen Ye, Tiantian Feng
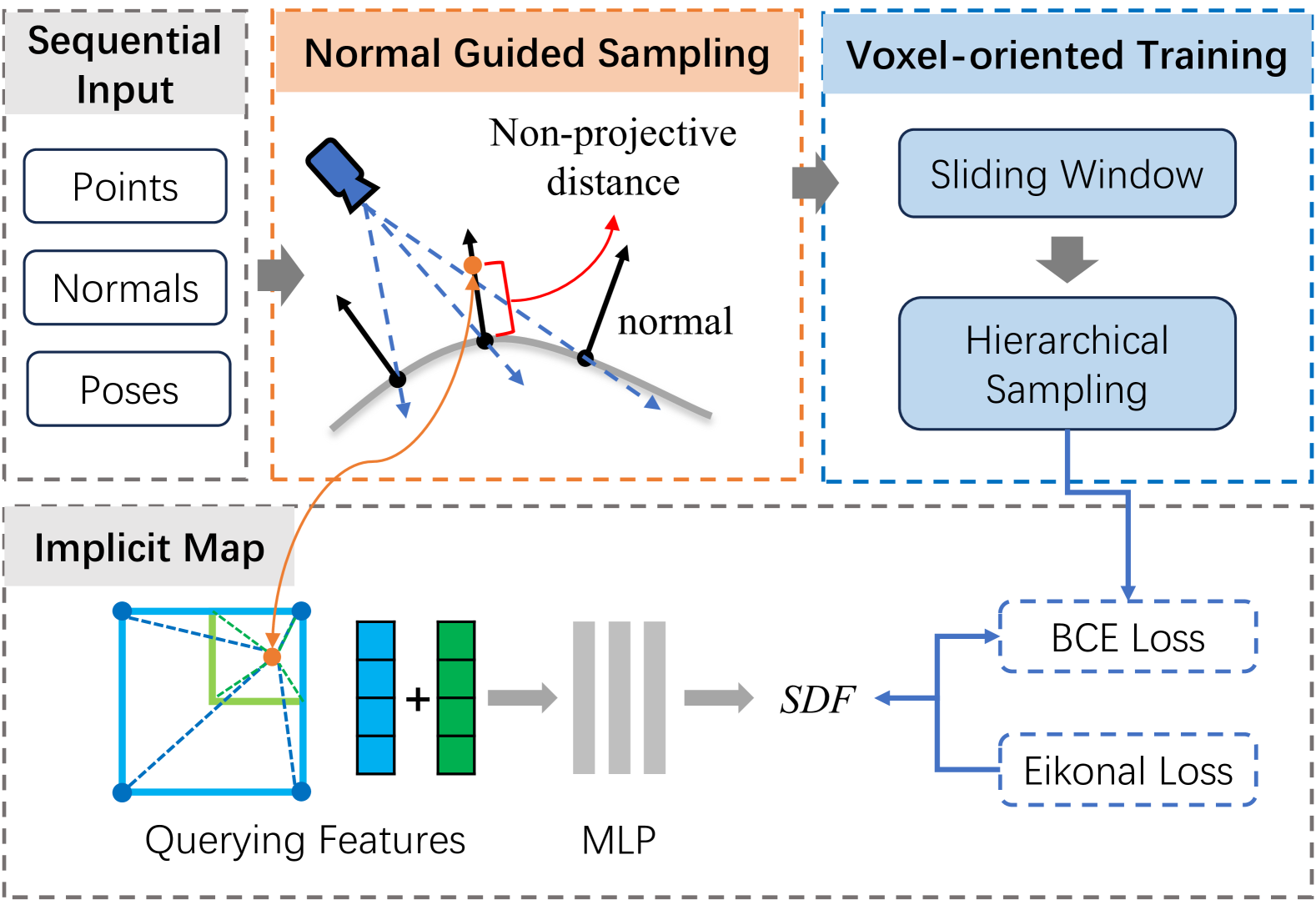
Accurate and dense mapping in large-scale environments is essential for various robot applications. Recently, implicit neural signed distance fields (SDFs) have shown promising advances in this task. However, most existing approaches employ projective distances from range data as SDF supervision, introducing approximation errors and thus degrading the mapping quality. To address this problem, we introduce N$^{3}$-Mapping, an implicit neural mapping system featuring normal-guided neural non-projective signed distance fields. Specifically, we directly sample points along the surface normal, instead of the ray, to obtain more accurate non-projective distance values from range data. Then these distance values are used as supervision to train the implicit map. For large-scale mapping, we apply a voxel-oriented sliding window mechanism to alleviate the forgetting issue with a bounded memory footprint. Besides, considering the uneven distribution of measured point clouds, a hierarchical sampling strategy is designed to improve training efficiency. Experiments demonstrate that our method effectively mitigates SDF approximation errors and achieves state-of-the-art mapping quality compared to existing approaches.
Read more4/30/2024
0
Fast Learning of Signed Distance Functions from Noisy Point Clouds via Noise to Noise Mapping
Junsheng Zhou, Baorui Ma, Yu-Shen Liu, Zhizhong Han
Learning signed distance functions (SDFs) from point clouds is an important task in 3D computer vision. However, without ground truth signed distances, point normals or clean point clouds, current methods still struggle from learning SDFs from noisy point clouds. To overcome this challenge, we propose to learn SDFs via a noise to noise mapping, which does not require any clean point cloud or ground truth supervision. Our novelty lies in the noise to noise mapping which can infer a highly accurate SDF of a single object or scene from its multiple or even single noisy observations. We achieve this by a novel loss which enables statistical reasoning on point clouds and maintains geometric consistency although point clouds are irregular, unordered and have no point correspondence among noisy observations. To accelerate training, we use multi-resolution hash encodings implemented in CUDA in our framework, which reduces our training time by a factor of ten, achieving convergence within one minute. We further introduce a novel schema to improve multi-view reconstruction by estimating SDFs as a prior. Our evaluations under widely-used benchmarks demonstrate our superiority over the state-of-the-art methods in surface reconstruction from point clouds or multi-view images, point cloud denoising and upsampling.
Read more7/22/2024

0
Implicit Filtering for Learning Neural Signed Distance Functions from 3D Point Clouds
Shengtao Li, Ge Gao, Yudong Liu, Ming Gu, Yu-Shen Liu
Neural signed distance functions (SDFs) have shown powerful ability in fitting the shape geometry. However, inferring continuous signed distance fields from discrete unoriented point clouds still remains a challenge. The neural network typically fits the shape with a rough surface and omits fine-grained geometric details such as shape edges and corners. In this paper, we propose a novel non-linear implicit filter to smooth the implicit field while preserving high-frequency geometry details. Our novelty lies in that we can filter the surface (zero level set) by the neighbor input points with gradients of the signed distance field. By moving the input raw point clouds along the gradient, our proposed implicit filtering can be extended to non-zero level sets to keep the promise consistency between different level sets, which consequently results in a better regularization of the zero level set. We conduct comprehensive experiments in surface reconstruction from objects and complex scene point clouds, the numerical and visual comparisons demonstrate our improvements over the state-of-the-art methods under the widely used benchmarks.
Read more9/11/2024
🧠
0
NC-SDF: Enhancing Indoor Scene Reconstruction Using Neural SDFs with View-Dependent Normal Compensation
Ziyi Chen, Xiaolong Wu, Yu Zhang
State-of-the-art neural implicit surface representations have achieved impressive results in indoor scene reconstruction by incorporating monocular geometric priors as additional supervision. However, we have observed that multi-view inconsistency between such priors poses a challenge for high-quality reconstructions. In response, we present NC-SDF, a neural signed distance field (SDF) 3D reconstruction framework with view-dependent normal compensation (NC). Specifically, we integrate view-dependent biases in monocular normal priors into the neural implicit representation of the scene. By adaptively learning and correcting the biases, our NC-SDF effectively mitigates the adverse impact of inconsistent supervision, enhancing both the global consistency and local details in the reconstructions. To further refine the details, we introduce an informative pixel sampling strategy to pay more attention to intricate geometry with higher information content. Additionally, we design a hybrid geometry modeling approach to improve the neural implicit representation. Experiments on synthetic and real-world datasets demonstrate that NC-SDF outperforms existing approaches in terms of reconstruction quality.
Read more5/2/2024