Feature Aggregation with Latent Generative Replay for Federated Continual Learning of Socially Appropriate Robot Behaviours
2405.15773
0
0
✨
Abstract
For widespread real-world applications, it is beneficial for robots to explore Federated Learning (FL) settings where several robots, deployed in parallel, can learn independently while also sharing their learning with each other. This work explores a simulated living room environment where robots need to learn the social appropriateness of their actions. We propose Federated Root (FedRoot), a novel weight aggregation strategy which disentangles feature learning across clients from individual task-based learning. Adapting popular FL strategies to use FedRoot instead, we present a novel FL benchmark for learning the social appropriateness of different robot actions in diverse social configurations. FedRoot-based methods offer competitive performance compared to others while offering sizeable (up to 86% for CPU usage and up to 72% for GPU usage) reduction in resource consumption. Furthermore, real-world interactions require social robots to dynamically adapt to changing environmental and task settings. To facilitate this, we propose Federated Latent Generative Replay (FedLGR), a novel Federated Continual Learning (FCL) strategy that uses FedRoot-based weight aggregation and embeds each client with a generator model for pseudo-rehearsal of learnt feature embeddings to mitigate forgetting in a resource-efficient manner. Our benchmark results demonstrate that FedRoot-based FCL methods outperform other methods while also offering sizeable (up to 84% for CPU usage and up to 92% for GPU usage) reduction in resource consumption, with FedLGR providing the best results across evaluations.
Create account to get full access
Overview
- This paper explores federated learning (FL) settings for robots, where multiple robots learn independently while sharing their learning with each other.
- The authors propose a new weight aggregation strategy called Federated Root (FedRoot) that separates feature learning across clients from individual task-based learning.
- The paper also introduces a novel FL benchmark for learning the social appropriateness of different robot actions in diverse social configurations.
- Additionally, the authors propose Federated Latent Generative Replay (FedLGR), a Federated Continual Learning (FCL) strategy that uses FedRoot-based weight aggregation and embedded generator models to mitigate forgetting in a resource-efficient manner.
Plain English Explanation
In the real world, it can be beneficial for robots to learn from each other, rather than each robot having to learn everything on its own. Federated learning (FL) is a way for multiple robots to learn independently while also sharing what they've learned.
This paper looks at a simulated living room environment where robots need to learn what actions are socially appropriate. The authors propose a new method called Federated Root (FedRoot) that helps the robots learn features (like how to identify social cues) separately from learning the specific task (like what actions are appropriate). This allows the robots to learn more efficiently.
The paper also introduces a benchmark, which is a standard way to evaluate and compare different AI methods. This benchmark focuses on how well the robots can learn social appropriateness.
Additionally, the researchers developed a new Federated Continual Learning (FCL) method called Federated Latent Generative Replay (FedLGR). This allows the robots to continually adapt to changing environments and tasks, without forgetting what they've already learned. FedLGR uses FedRoot and embedded generator models to do this in a resource-efficient way.
Overall, this research aims to make it easier for robots to learn and adapt in real-world social settings, by having them collaborate and learn from each other.
Technical Explanation
The paper explores Federated Learning (FL) settings for robots, where multiple robots learn independently while also sharing their learning with each other. The authors propose a novel weight aggregation strategy called Federated Root (FedRoot) that disentangles feature learning across clients from individual task-based learning.
Adapting popular FL strategies to use FedRoot, the researchers present a novel FL benchmark for learning the social appropriateness of different robot actions in diverse social configurations. The FedRoot-based methods offer competitive performance compared to other approaches, while providing significant reductions in resource consumption (up to 86% for CPU usage and up to 72% for GPU usage).
Furthermore, the paper addresses the need for social robots to dynamically adapt to changing environmental and task settings. The authors propose Federated Latent Generative Replay (FedLGR), a novel Federated Continual Learning (FCL) strategy that uses FedRoot-based weight aggregation and embeds each client with a generator model for pseudo-rehearsal of learnt feature embeddings. This helps mitigate forgetting in a resource-efficient manner.
The benchmark results demonstrate that FedRoot-based FCL methods outperform other methods, while also offering substantial reductions in resource consumption (up to 84% for CPU usage and up to 92% for GPU usage). FedLGR provides the best results across the evaluations.
Critical Analysis
The paper presents a compelling approach to enabling robots to learn and adapt in real-world social settings through federated learning. The FedRoot weight aggregation strategy and the FedLGR continual learning method are novel contributions that address important challenges in this domain.
However, the paper does not discuss the limitations of the simulated environment used for the experiments. While this allows for controlled evaluation, the extent to which the findings would translate to real-world scenarios with all their complexities is unclear. Systematic reviews of federated generative models and challenges in federated learning contribution allocation suggest that further research is needed to address issues like client heterogeneity, privacy, and scalability in real-world federated learning deployments.
Additionally, the paper does not provide insight into the training time and convergence properties of the proposed methods compared to existing approaches. Evaluations of federated reinforcement learning and generative models could offer useful benchmarks for comparison.
Overall, the research presents promising directions for enabling social robots to learn and adapt in a federated setting. However, further investigation is needed to assess the practicality and scalability of the approaches in realistic deployment scenarios.
Conclusion
This paper explores the use of Federated Learning (FL) for enabling robots to learn the social appropriateness of their actions in a simulated living room environment. The authors propose a novel weight aggregation strategy called Federated Root (FedRoot) and a Federated Continual Learning (FCL) method called Federated Latent Generative Replay (FedLGR) to address the challenges of feature learning, task-based learning, and dynamic adaptation.
The FedRoot-based methods offer competitive performance while significantly reducing resource consumption compared to other approaches. FedLGR, in particular, provides the best results in the authors' benchmarks, demonstrating the potential of these techniques for enabling social robots to learn and adapt in real-world settings.
While the simulated environment provides a controlled setting for evaluation, further research is needed to assess the scalability and practicality of these methods in more complex, real-world scenarios. Addressing issues like client heterogeneity, privacy, and training efficiency will be crucial for the widespread adoption of federated learning in robotics and other domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Federated Generative Learning with Foundation Models
Jie Zhang, Xiaohua Qi, Bo Zhao
0
0
Existing approaches in Federated Learning (FL) mainly focus on sending model parameters or gradients from clients to a server. However, these methods are plagued by significant inefficiency, privacy, and security concerns. Thanks to the emerging foundation generative models, we propose a novel federated learning framework, namely Federated Generative Learning. In this framework, each client can create text embeddings that are tailored to their local data, and send embeddings to the server. Then the informative training data can be synthesized remotely on the server using foundation generative models with these embeddings, which can benefit FL tasks. Our proposed framework offers several advantages, including increased communication efficiency, robustness to data heterogeneity, substantial performance improvements, and enhanced privacy protection. We validate these benefits through extensive experiments conducted on 12 datasets. For example, on the ImageNet100 dataset with a highly skewed data distribution, our method outperforms FedAvg by 12% in a single communication round, compared to FedAvg's performance over 200 communication rounds. We have released the code for all experiments conducted in this study.
6/4/2024
Parameterizing Federated Continual Learning for Reproducible Research
Bart Cox, Jeroen Galjaard, Aditya Shankar, J'er'emie Decouchant, Lydia Y. Chen
0
0
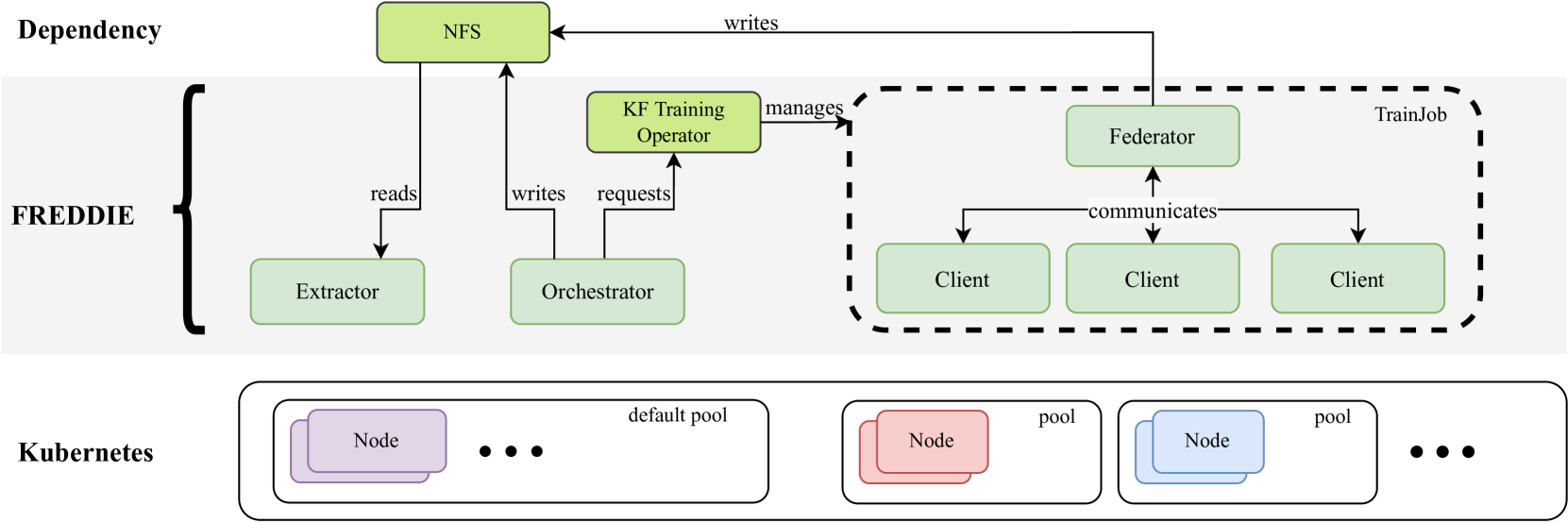
Federated Learning (FL) systems evolve in heterogeneous and ever-evolving environments that challenge their performance. Under real deployments, the learning tasks of clients can also evolve with time, which calls for the integration of methodologies such as Continual Learning. To enable research reproducibility, we propose a set of experimental best practices that precisely capture and emulate complex learning scenarios. Our framework, Freddie, is the first entirely configurable framework for Federated Continual Learning (FCL), and it can be seamlessly deployed on a large number of machines thanks to the use of Kubernetes and containerization. We demonstrate the effectiveness of Freddie on two use cases, (i) large-scale FL on CIFAR100 and (ii) heterogeneous task sequence on FCL, which highlight unaddressed performance challenges in FCL scenarios.
6/5/2024

Reducing Bias in Federated Class-Incremental Learning with Hierarchical Generative Prototypes
Riccardo Salami, Pietro Buzzega, Matteo Mosconi, Mattia Verasani, Simone Calderara
0
0
Federated Learning (FL) aims at unburdening the training of deep models by distributing computation across multiple devices (clients) while safeguarding data privacy. On top of that, Federated Continual Learning (FCL) also accounts for data distribution evolving over time, mirroring the dynamic nature of real-world environments. In this work, we shed light on the Incremental and Federated biases that naturally emerge in FCL. While the former is a known problem in Continual Learning, stemming from the prioritization of recently introduced classes, the latter (i.e., the bias towards local distributions) remains relatively unexplored. Our proposal constrains both biases in the last layer by efficiently fine-tuning a pre-trained backbone using learnable prompts, resulting in clients that produce less biased representations and more biased classifiers. Therefore, instead of solely relying on parameter aggregation, we also leverage generative prototypes to effectively balance the predictions of the global model. Our method improves on the current State Of The Art, providing an average increase of +7.9% in accuracy.
6/5/2024
🏅
Compressed Federated Reinforcement Learning with a Generative Model
Ali Beikmohammadi, Sarit Khirirat, Sindri Magn'usson
0
0
Reinforcement learning has recently gained unprecedented popularity, yet it still grapples with sample inefficiency. Addressing this challenge, federated reinforcement learning (FedRL) has emerged, wherein agents collaboratively learn a single policy by aggregating local estimations. However, this aggregation step incurs significant communication costs. In this paper, we propose CompFedRL, a communication-efficient FedRL approach incorporating both textit{periodic aggregation} and (direct/error-feedback) compression mechanisms. Specifically, we consider compressed federated $Q$-learning with a generative model setup, where a central server learns an optimal $Q$-function by periodically aggregating compressed $Q$-estimates from local agents. For the first time, we characterize the impact of these two mechanisms (which have remained elusive) by providing a finite-time analysis of our algorithm, demonstrating strong convergence behaviors when utilizing either direct or error-feedback compression. Our bounds indicate improved solution accuracy concerning the number of agents and other federated hyperparameters while simultaneously reducing communication costs. To corroborate our theory, we also conduct in-depth numerical experiments to verify our findings, considering Top-$K$ and Sparsified-$K$ sparsification operators.
6/6/2024