Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation

0
📈
Sign in to get full access
Overview
- This paper presents a bio-inspired, energy-efficient, and adaptive soft gripper mounted on a quadcopter to enable agile aerial robotic manipulation.
- The gripper is powered by hydraulically amplified electrostatic actuators, inspired by an eagle's foot and a scorpion's tail design.
- This is the first demonstration of soft manipulation in air using electrostatic actuation, showing the potential of untethered hydraulic electrostatic actuators in mobile aerial systems.
Plain English Explanation
The paper describes a new type of gripper that can be used on aerial robots, such as drones, to pick up and manipulate objects in the air. This gripper is inspired by the feet of eagles and the tails of scorpions, and it uses a special type of actuator called a hydraulically amplified electrostatic actuator.
Embodying Control of Soft Multistable Grippers From Morphofunctional Inspiration and Novel Center-of-Mass Displacing Aerial Manipulation Platform have explored related ideas for soft grippers and aerial manipulation.
The key advantage of this gripper is that it is soft and adaptive, which means it can interact safely and naturally with its environment. This could be very useful for tasks like warehouse operations, where the gripper needs to handle a variety of objects of different shapes and sizes.
The paper shows that this soft gripper, when combined with an agile aerial vehicle like a quadcopter, could revolutionize the way we do aerial robotic manipulation, making it more efficient and versatile.
Technical Explanation
The researchers developed a custom multi-actuator concept inspired by a scorpion's tail design and spider-inspired joints. This hybrid design, which sandwiches a flexible hinge layer, allows for higher force output under moderate deflections of up to 25 degrees, compared to single-hinge concepts.
Underactuated Control of Multiple Soft Pneumatic Actuators via Compliant Optoelectronic Sensors and Haptic-Based Bilateral Teleoperation of an Aerial Manipulator: Extracting Relevant Kinesthetic Cues have explored related approaches to controlling soft actuators and aerial manipulation.
The key innovation in this paper is the use of hydraulically amplified electrostatic actuators, which allow for untethered operation and high force output in a soft, adaptive gripper. This is the first demonstration of soft manipulation in air using electrostatic actuation.
The researchers tested their proof-of-concept system, which combines the soft gripper with a quadcopter, and showed that it can safely and naturally interact with its environment, opening up new possibilities for aerial robotic manipulation.
Critical Analysis
The paper provides a promising proof of concept for a soft, adaptive gripper that can be used on aerial robots. However, the researchers acknowledge that there are still some limitations to the technology, such as the need for further optimization of the actuator design and control algorithms to improve performance and robustness.
Design and Modeling of Characteristics of a Ring-Shaped Robot Actuated by Pneumatic Artificial Muscles has explored related challenges in designing and controlling soft actuators.
Additionally, the researchers note that the current prototype is still relatively bulky and may not be suitable for all aerial manipulation tasks. Further miniaturization and weight reduction would be necessary to fully unlock the potential of this technology in real-world applications.
Overall, the paper presents a promising step forward in the development of soft, adaptive grippers for aerial robotic manipulation, but there is still more work to be done to make the technology fully practical and scalable.
Conclusion
This paper demonstrates the potential of a bio-inspired, energy-efficient, and adaptive soft gripper powered by hydraulically amplified electrostatic actuators for aerial robotic manipulation. The proof-of-concept system shows that soft manipulation in air is possible using electrostatic actuation, opening up new possibilities for untethered, agile aerial robotics in applications such as warehousing and logistics.
While there are still some limitations to address, this research represents an important step towards more versatile and natural interaction between aerial robots and their environments, with promising implications for a wide range of industrial and societal applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Flying Hydraulically Amplified Electrostatic Gripper System for Aerial Object Manipulation
Dario Tscholl, Stephan-Daniel Gravert, Aurel X. Appius, Robert K. Katzschmann
Rapid and versatile object manipulation in air is an open challenge. An energy-efficient and adaptive soft gripper combined with an agile aerial vehicle could revolutionize aerial robotic manipulation in areas such as warehousing. This paper presents a bio-inspired gripper powered by hydraulically amplified electrostatic actuators mounted to a quadcopter that can interact safely and naturally with its environment. Our gripping concept is motivated by an eagle's foot. Our custom multi-actuator concept is inspired by a scorpion tail design (consisting of a base electrode with pouches stacked adjacently) and spider-inspired joints (classic pouch motors with a flexible hinge layer). A hybrid of these two designs realizes a higher force output under moderate deflections of up to 25{deg} compared to single-hinge concepts. In addition, sandwiching the hinge layer improves the robustness of the gripper. For the first time, we show that soft manipulation in air is possible using electrostatic actuation. This study demonstrates the potential of untethered hydraulically amplified actuators in aerial robotic manipulation. Our proof of concept opens up the use of hydraulic electrostatic actuators in mobile aerial systems.
Read more7/18/2024

0
An Open-Source Soft Robotic Platform for Autonomous Aerial Manipulation in the Wild
Erik Bauer, Marc Blochlinger, Pascal Strauch, Arman Raayatsanati, Curdin Cavelti, Robert K. Katzschmann
Aerial manipulation combines the versatility and speed of flying platforms with the functional capabilities of mobile manipulation, which presents significant challenges due to the need for precise localization and control. Traditionally, researchers have relied on offboard perception systems, which are limited to expensive and impractical specially equipped indoor environments. In this work, we introduce a novel platform for autonomous aerial manipulation that exclusively utilizes onboard perception systems. Our platform can perform aerial manipulation in various indoor and outdoor environments without depending on external perception systems. Our experimental results demonstrate the platform's ability to autonomously grasp various objects in diverse settings. This advancement significantly improves the scalability and practicality of aerial manipulation applications by eliminating the need for costly tracking solutions. To accelerate future research, we open source our ROS 2 software stack and custom hardware design, making our contributions accessible to the broader research community.
Read more9/14/2024
0
Underactuated Control of Multiple Soft Pneumatic Actuators via Stable Inversion
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
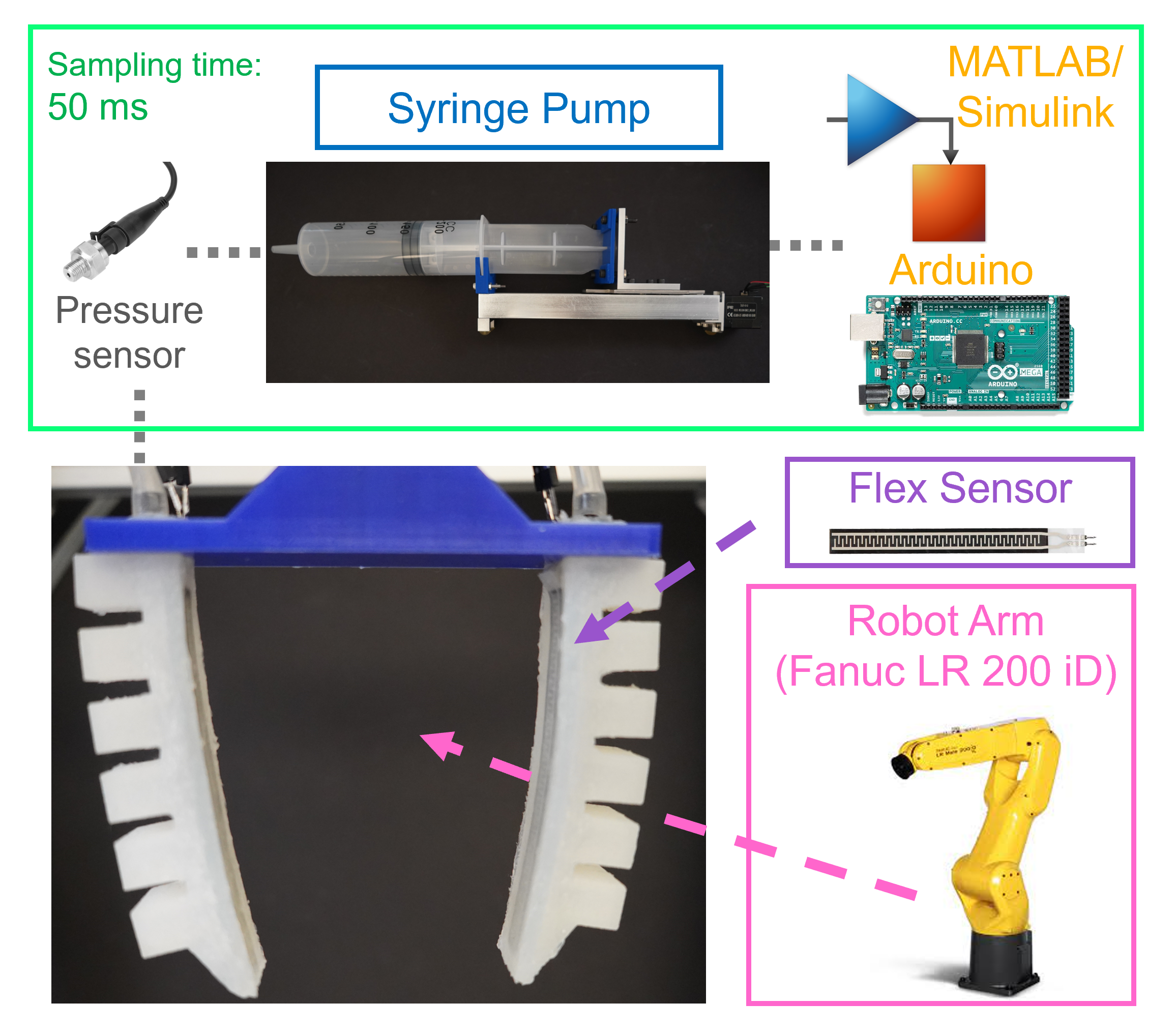
Soft grippers, with their inherent compliance and adaptability, show advantages for delicate and versatile manipulation tasks in robotics. This paper presents a novel approach to underactuated control of multiple soft actuators, specifically focusing on the synchronization of soft fingers within a soft gripper. Utilizing a single syringe pump as the actuation mechanism, we address the challenge of coordinating multiple degrees of freedom of a compliant system. The theoretical framework applies concepts from stable inversion theory, adapting them to the unique dynamics of the underactuated soft gripper. Through meticulous mechatronic system design and controller synthesis, we demonstrate both in simulation and experimentation the efficacy and applicability of our approach in achieving precise and synchronized manipulation tasks. Our findings not only contribute to the advancement of soft robot control but also offer practical insights into the design and control of underactuated systems for real-world applications.
Read more6/10/2024
🔗
0
A Multimodal Soft Gripper with Variable Stiffness and Variable Gripping Range Based on MASH Actuator
Dannuo Li, Xuanyi Zhou, Quan Xiong, Chen-Hua Yeow
Soft pneumatic actuators with integrated strain limiting layers have emerged as predominant components in the field of soft gripper technology for several decades. However, owing to their intrinsic strain-limiting layer design, these soft grippers possess a singular gripping functionality, rendering them incapable of adapting to diverse gripping tasks with different strategies. Based on our previous work, we introduce a novel soft gripper that offers variable stiffness, an adjustable gripping range, and multifunctionality. The MASH actuator based soft gripper can expand its gripping range up to threefold compared to the original configuration and ensures secure grip by enhancing stiffness when handling heavy objects. Moreover, it supports multitasking gripping through specific gripping strategy control.
Read more8/13/2024