FoundPose: Unseen Object Pose Estimation with Foundation Features

0
Sign in to get full access
Overview
- This paper introduces FoundPose, a method for estimating the 6D pose of unseen objects using foundation features.
- FoundPose leverages large pre-trained models to extract features that are transferable to new object categories, enabling pose estimation without requiring training data for those objects.
- The method outperforms state-of-the-art approaches on several benchmark datasets for unseen object pose estimation.
Plain English Explanation
In computer vision, 6D pose estimation is the task of determining an object's position and orientation in 3D space. This is an important capability for applications like robotics, augmented reality, and self-driving cars.
Traditionally, pose estimation models have been trained on datasets of labeled object images. However, this approach struggles with unseen objects - objects that were not included in the training data.
The FoundPose method aims to address this by leveraging foundation models - large, pre-trained neural networks that have learned general visual features. FoundPose extracts these transferable features from images and uses them to estimate the 6D pose of unseen objects, without requiring any training data for those specific objects.
The key insight is that the visual features learned by foundation models contain information that is useful for 6D pose estimation, even for objects the model has never seen before. By tapping into this powerful, general-purpose visual understanding, FoundPose can generalize to new object categories.
Technical Explanation
The FoundPose approach consists of three main components:
Feature Extraction
FoundPose uses a pre-trained foundation model (such as CLIP or Stable Diffusion) to extract visual features from input images. These features capture general visual information that can be transferred to new object categories.
Pose Regression
The extracted features are then fed into a pose regression network that predicts the 6D pose of the object (its 3D position and 3D orientation). This network is trained on a dataset of labeled object poses, but crucially, the objects in this dataset do not need to match the unseen objects at test time.
Refinement
To further improve accuracy, FoundPose also includes a pose refinement module that iteratively updates the pose prediction using additional visual cues from the input image.
The key innovation of FoundPose is its ability to estimate the pose of unseen objects by leveraging the general visual understanding captured in foundation models, without requiring any training data for those specific objects. This makes the method highly versatile and applicable to a wide range of real-world scenarios.
Critical Analysis
The FoundPose paper presents a promising approach for unseen object pose estimation, but there are a few potential limitations and areas for further research:
- Reliance on Foundation Models: FoundPose's performance is heavily dependent on the quality and capabilities of the underlying foundation model. If the foundation model fails to capture relevant visual features, FoundPose's pose estimates may suffer.
- Generalization to Diverse Datasets: While FoundPose demonstrates strong results on certain benchmark datasets, its ability to generalize to more diverse, real-world scenarios with varied object types, backgrounds, and occlusions remains to be thoroughly evaluated.
- Computational Efficiency: The paper does not provide detailed information about the computational cost and runtime of FoundPose, which could be an important consideration for real-time applications.
- Interpretability: As with many deep learning-based methods, the inner workings of FoundPose may not be fully interpretable, making it difficult to understand why certain pose estimates are produced.
Despite these potential limitations, FoundPose represents an exciting step forward in unseen object pose estimation and highlights the promise of leveraging large, pre-trained foundation models for computer vision tasks.
Conclusion
The FoundPose method introduces a novel approach to 6D pose estimation that can handle unseen objects by tapping into the general visual understanding captured by foundation models. By extracting transferable features from these pre-trained models, FoundPose is able to estimate the pose of objects without requiring any training data for those specific objects.
This capability has the potential to significantly expand the applicability of 6D pose estimation in real-world scenarios, where the range of objects encountered may not be known in advance. As foundation models continue to evolve and improve, the performance and versatility of FoundPose are likely to further advance, making it an increasingly valuable tool for robotics, augmented reality, and other computer vision applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FoundPose: Unseen Object Pose Estimation with Foundation Features
Evin P{i}nar Ornek, Yann Labb'e, Bugra Tekin, Lingni Ma, Cem Keskin, Christian Forster, Tomas Hodan
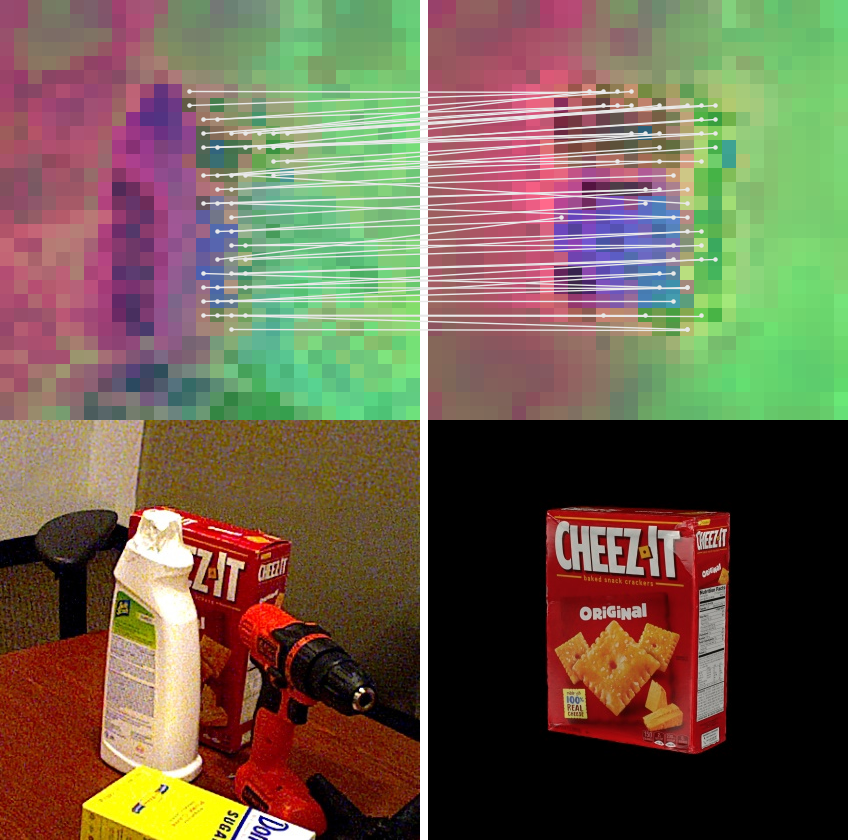
We propose FoundPose, a model-based method for 6D pose estimation of unseen objects from a single RGB image. The method can quickly onboard new objects using their 3D models without requiring any object- or task-specific training. In contrast, existing methods typically pre-train on large-scale, task-specific datasets in order to generalize to new objects and to bridge the image-to-model domain gap. We demonstrate that such generalization capabilities can be observed in a recent vision foundation model trained in a self-supervised manner. Specifically, our method estimates the object pose from image-to-model 2D-3D correspondences, which are established by matching patch descriptors from the recent DINOv2 model between the image and pre-rendered object templates. We find that reliable correspondences can be established by kNN matching of patch descriptors from an intermediate DINOv2 layer. Such descriptors carry stronger positional information than descriptors from the last layer, and we show their importance when semantic information is ambiguous due to object symmetries or a lack of texture. To avoid establishing correspondences against all object templates, we develop an efficient template retrieval approach that integrates the patch descriptors into the bag-of-words representation and can promptly propose a handful of similarly looking templates. Additionally, we apply featuremetric alignment to compensate for discrepancies in the 2D-3D correspondences caused by coarse patch sampling. The resulting method noticeably outperforms existing RGB methods for refinement-free pose estimation on the standard BOP benchmark with seven diverse datasets and can be seamlessly combined with an existing render-and-compare refinement method to achieve RGB-only state-of-the-art results. Project page: evinpinar.github.io/foundpose.
Read more7/22/2024
0
Towards Human-Level 3D Relative Pose Estimation: Generalizable, Training-Free, with Single Reference
Yuan Gao, Yajing Luo, Junhong Wang, Kui Jia, Gui-Song Xia
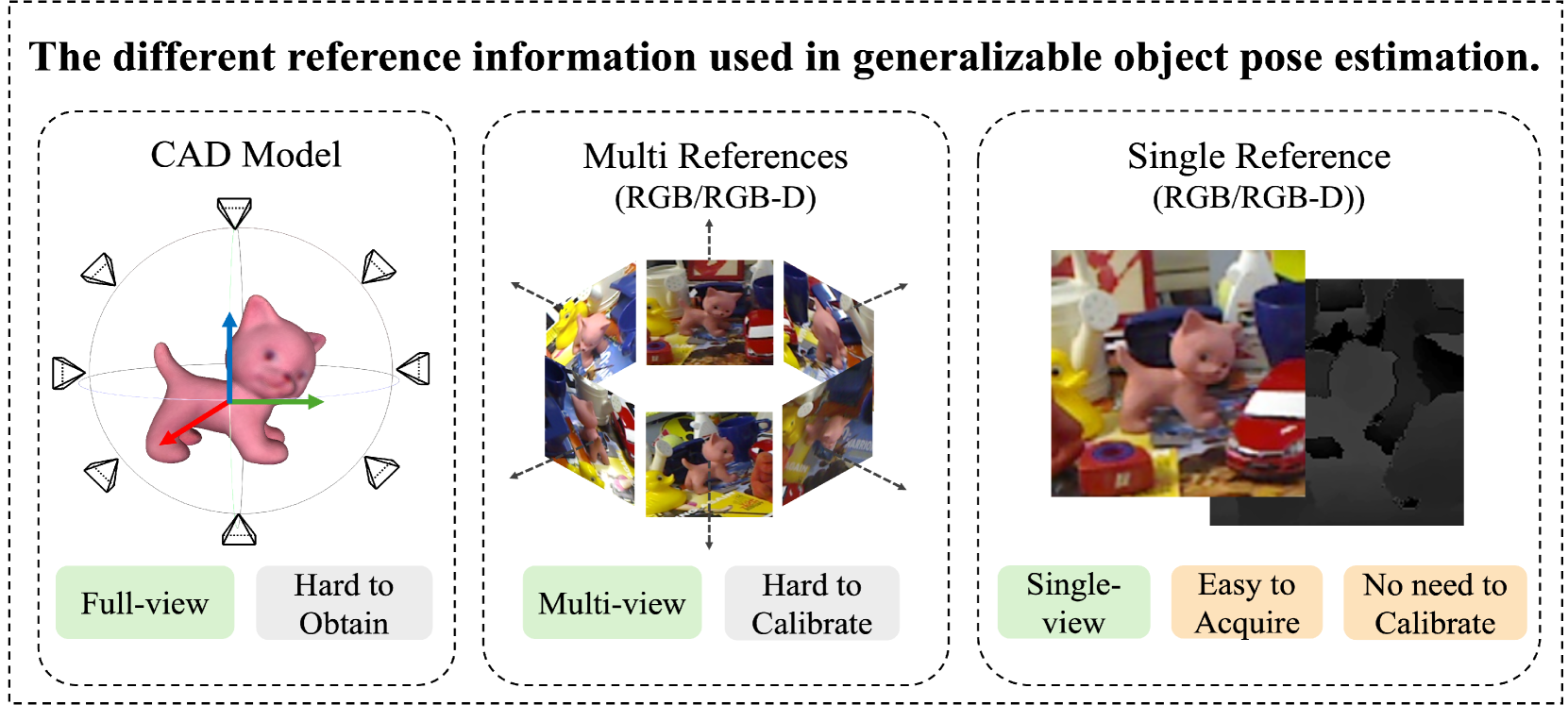
Humans can easily deduce the relative pose of an unseen object, without label/training, given only a single query-reference image pair. This is arguably achieved by incorporating (i) 3D/2.5D shape perception from a single image, (ii) render-and-compare simulation, and (iii) rich semantic cue awareness to furnish (coarse) reference-query correspondence. Existing methods implement (i) by a 3D CAD model or well-calibrated multiple images and (ii) by training a network on specific objects, which necessitate laborious ground-truth labeling and tedious training, potentially leading to challenges in generalization. Moreover, (iii) was less exploited in the paradigm of (ii), despite that the coarse correspondence from (iii) enhances the compare process by filtering out non-overlapped parts under substantial pose differences/occlusions. Motivated by this, we propose a novel 3D generalizable relative pose estimation method by elaborating (i) with a 2.5D shape from an RGB-D reference, (ii) with an off-the-shelf differentiable renderer, and (iii) with semantic cues from a pretrained model like DINOv2. Specifically, our differentiable renderer takes the 2.5D rotatable mesh textured by the RGB and the semantic maps (obtained by DINOv2 from the RGB input), then renders new RGB and semantic maps (with back-surface culling) under a novel rotated view. The refinement loss comes from comparing the rendered RGB and semantic maps with the query ones, back-propagating the gradients through the differentiable renderer to refine the 3D relative pose. As a result, our method can be readily applied to unseen objects, given only a single RGB-D reference, without label/training. Extensive experiments on LineMOD, LM-O, and YCB-V show that our training-free method significantly outperforms the SOTA supervised methods, especially under the rigorous Acc@5/10/15{deg} metrics and the challenging cross-dataset settings.
Read more6/27/2024

0
Unsupervised Learning of Category-Level 3D Pose from Object-Centric Videos
Leonhard Sommer, Artur Jesslen, Eddy Ilg, Adam Kortylewski
Category-level 3D pose estimation is a fundamentally important problem in computer vision and robotics, e.g. for embodied agents or to train 3D generative models. However, so far methods that estimate the category-level object pose require either large amounts of human annotations, CAD models or input from RGB-D sensors. In contrast, we tackle the problem of learning to estimate the category-level 3D pose only from casually taken object-centric videos without human supervision. We propose a two-step pipeline: First, we introduce a multi-view alignment procedure that determines canonical camera poses across videos with a novel and robust cyclic distance formulation for geometric and appearance matching using reconstructed coarse meshes and DINOv2 features. In a second step, the canonical poses and reconstructed meshes enable us to train a model for 3D pose estimation from a single image. In particular, our model learns to estimate dense correspondences between images and a prototypical 3D template by predicting, for each pixel in a 2D image, a feature vector of the corresponding vertex in the template mesh. We demonstrate that our method outperforms all baselines at the unsupervised alignment of object-centric videos by a large margin and provides faithful and robust predictions in-the-wild. Our code and data is available at https://github.com/GenIntel/uns-obj-pose3d.
Read more7/8/2024
🎯
0
Free-Moving Object Reconstruction and Pose Estimation with Virtual Camera
Haixin Shi, Yinlin Hu, Daniel Koguciuk, Juan-Ting Lin, Mathieu Salzmann, David Ferstl
We propose an approach for reconstructing free-moving object from a monocular RGB video. Most existing methods either assume scene prior, hand pose prior, object category pose prior, or rely on local optimization with multiple sequence segments. We propose a method that allows free interaction with the object in front of a moving camera without relying on any prior, and optimizes the sequence globally without any segments. We progressively optimize the object shape and pose simultaneously based on an implicit neural representation. A key aspect of our method is a virtual camera system that reduces the search space of the optimization significantly. We evaluate our method on the standard HO3D dataset and a collection of egocentric RGB sequences captured with a head-mounted device. We demonstrate that our approach outperforms most methods significantly, and is on par with recent techniques that assume prior information.
Read more5/13/2024