RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios

0

Sign in to get full access
Overview
- Introduces a new benchmark called RoboCAS for evaluating robotic manipulation in complex object arrangement scenarios
- Aims to advance research on generalist robotic manipulation capabilities by providing a challenging, large-scale simulation environment
- Includes a diverse set of manipulation tasks involving multiple objects of varying shapes, sizes, and materials
Plain English Explanation
RoboCAS is a new benchmark for testing the abilities of robotic systems to manipulate and arrange complex objects in simulated environments. RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios was developed to drive progress in generalist robotic manipulation, which is the ability of robots to handle a wide variety of objects and tasks, much like humans can.
The benchmark provides a large-scale simulation environment with a diverse set of manipulation challenges, such as rearranging multiple objects of different shapes, sizes, and materials. This aims to push the boundaries of current robotic capabilities and encourage the development of more versatile, adaptable robot control systems.
By testing robots in these complex, real-world-inspired scenarios, the researchers hope to accelerate the progress towards robots that can seamlessly assist humans with a broad range of everyday tasks, just as a human assistant would.
Technical Explanation
RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios presents a new benchmark for evaluating robotic manipulation in complex, multi-object arrangement scenarios. The benchmark is designed to assess the generalist manipulation capabilities of robotic systems, going beyond specialized tasks or simple object interactions.
The RoboCAS environment includes a diverse set of manipulation challenges, such as rearranging multiple objects of varying shapes, sizes, and materials, as well as more complex tasks like stacking objects or placing them in specific configurations. The researchers have carefully curated a large-scale simulation dataset with over 100,000 unique object arrangements and task instances.
To establish baseline performance, the authors evaluate several state-of-the-art robotic manipulation algorithms on the RoboCAS benchmark, including those based on HumanoidBench, Colosseum, and FetchBench. The results highlight the significant challenges posed by the RoboCAS benchmark and the need for further advancements in generalist robotic manipulation capabilities.
Critical Analysis
The RoboCAS benchmark presents a valuable contribution to the field of robotic manipulation research. By focusing on complex, multi-object arrangement scenarios, the benchmark pushes the boundaries of current robotic capabilities and encourages the development of more versatile, adaptable control systems.
However, the authors acknowledge that the RoboCAS benchmark, like any simulation-based evaluation, may not fully capture the nuances and challenges of real-world environments. There is a need for further research on evaluating real-world robot manipulation policies in simulation to ensure a smooth transfer of learned skills from the virtual to the physical world.
Additionally, while the RoboCAS benchmark covers a diverse set of manipulation tasks, it may not fully represent the breadth of challenges that robots may encounter in real-world scenarios. Continuous expansion and refinement of the benchmark, in collaboration with the robotics community, could further enhance its utility and relevance.
Conclusion
The RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios paper presents a valuable contribution to the field of robotic manipulation research. By providing a challenging, large-scale simulation environment for evaluating generalist manipulation capabilities, the benchmark aims to drive progress towards more versatile and adaptable robot control systems.
The detailed evaluation of state-of-the-art algorithms on the RoboCAS benchmark highlights the significant challenges posed by complex, multi-object arrangement scenarios, underscoring the need for further advancements in this field. As the robotics community continues to build upon and refine the RoboCAS benchmark, it has the potential to play a crucial role in accelerating the development of robotic systems that can seamlessly assist humans with a broad range of everyday tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RoboCAS: A Benchmark for Robotic Manipulation in Complex Object Arrangement Scenarios
Liming Zheng, Feng Yan, Fanfan Liu, Chengjian Feng, Zhuoliang Kang, Lin Ma
Foundation models hold significant potential for enabling robots to perform long-horizon general manipulation tasks. However, the simplicity of tasks and the uniformity of environments in existing benchmarks restrict their effective deployment in complex scenarios. To address this limitation, this paper introduces the textit{RoboCAS} benchmark, the first benchmark specifically designed for complex object arrangement scenarios in robotic manipulation. This benchmark employs flexible and concise scripted policies to efficiently collect a diverse array of demonstrations, showcasing scattered, orderly, and stacked object arrangements within a highly realistic physical simulation environment. It includes complex processes such as target retrieval, obstacle clearance, and robot manipulation, testing agents' abilities to perform long-horizon planning for spatial reasoning and predicting chain reactions under ambiguous instructions. Extensive experiments on multiple baseline models reveal their limitations in managing complex object arrangement scenarios, underscoring the urgent need for intelligent agents capable of performing long-horizon operations in practical deployments and providing valuable insights for future research directions. Project website: url{https://github.com/notFoundThisPerson/RoboCAS-v0}.
Read more7/10/2024
0
A framework for training and benchmarking algorithms that schedule robot tasks
Wojciech Dudek, Daniel Gie{l}dowski, Tomasz Winiarski
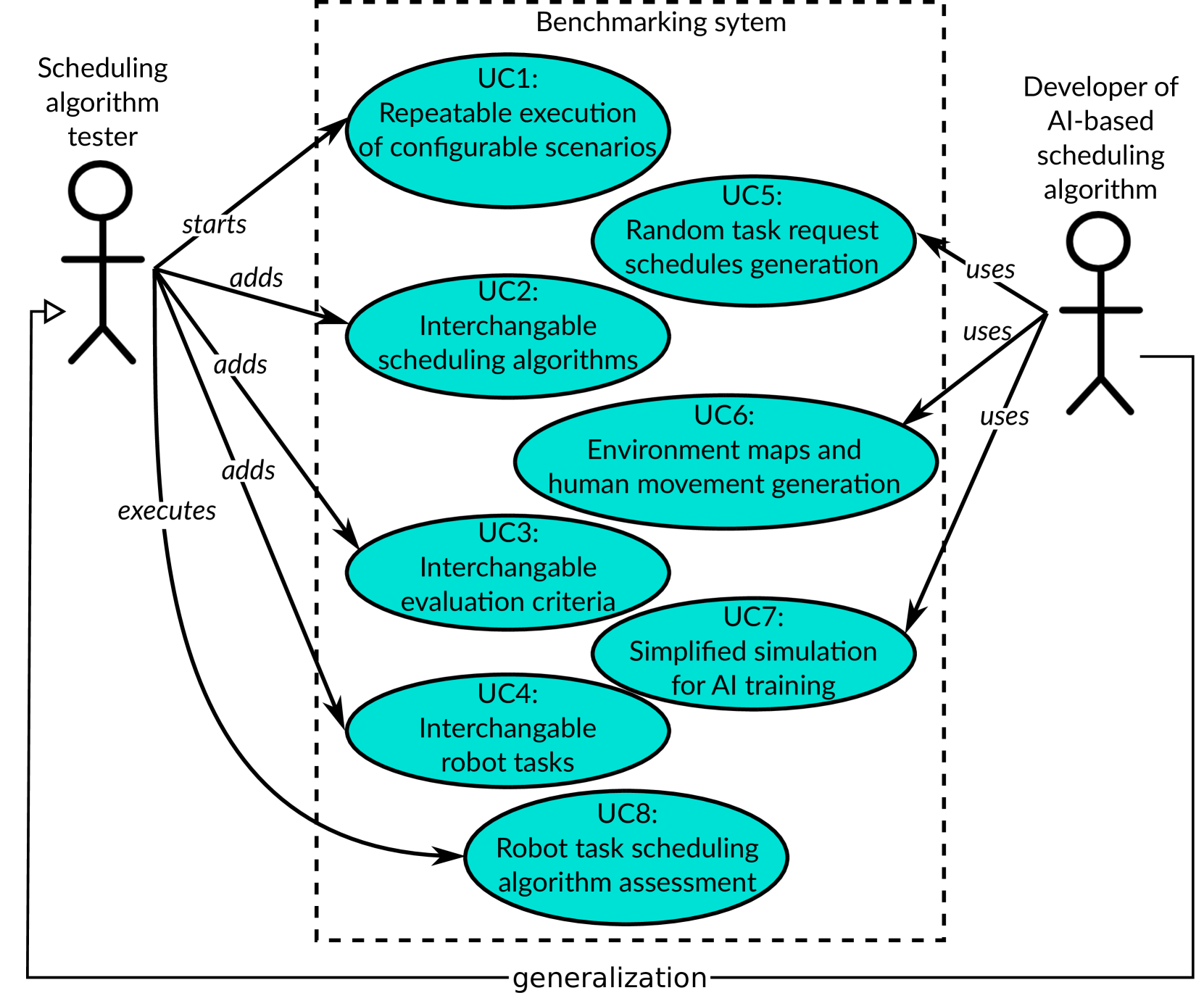
Service robots work in a changing environment habited by exogenous agents like humans. In the service robotics domain, lots of uncertainties result from exogenous actions and inaccurate localisation of objects and the robot itself. This makes the robot task scheduling problem incredibly challenging. In this article, we propose a benchmarking system for systematically assessing the performance of algorithms scheduling robot tasks. The robot environment incorporates a room map, furniture, transportable objects, and moving humans; the system defines interfaces for the algorithms, tasks to be executed, and evaluation methods. The system consists of several tools, easing testing scenario generation for training AI-based scheduling algorithms and statistical testing. For benchmarking purposes, a set of scenarios is chosen, and the performance of several scheduling algorithms is assessed. The system source is published to serve the community for tuning and comparable assessment of robot task scheduling algorithms for service robots.
Read more9/2/2024

0
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Soroush Nasiriany, Abhiram Maddukuri, Lance Zhang, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, Yuke Zhu
Recent advancements in Artificial Intelligence (AI) have largely been propelled by scaling. In Robotics, scaling is hindered by the lack of access to massive robot datasets. We advocate using realistic physical simulation as a means to scale environments, tasks, and datasets for robot learning methods. We present RoboCasa, a large-scale simulation framework for training generalist robots in everyday environments. RoboCasa features realistic and diverse scenes focusing on kitchen environments. We provide thousands of 3D assets across over 150 object categories and dozens of interactable furniture and appliances. We enrich the realism and diversity of our simulation with generative AI tools, such as object assets from text-to-3D models and environment textures from text-to-image models. We design a set of 100 tasks for systematic evaluation, including composite tasks generated by the guidance of large language models. To facilitate learning, we provide high-quality human demonstrations and integrate automated trajectory generation methods to substantially enlarge our datasets with minimal human burden. Our experiments show a clear scaling trend in using synthetically generated robot data for large-scale imitation learning and show great promise in harnessing simulation data in real-world tasks. Videos and open-source code are available at https://robocasa.ai/
Read more6/5/2024

0
HumanoidBench: Simulated Humanoid Benchmark for Whole-Body Locomotion and Manipulation
Carmelo Sferrazza, Dun-Ming Huang, Xingyu Lin, Youngwoon Lee, Pieter Abbeel
Humanoid robots hold great promise in assisting humans in diverse environments and tasks, due to their flexibility and adaptability leveraging human-like morphology. However, research in humanoid robots is often bottlenecked by the costly and fragile hardware setups. To accelerate algorithmic research in humanoid robots, we present a high-dimensional, simulated robot learning benchmark, HumanoidBench, featuring a humanoid robot equipped with dexterous hands and a variety of challenging whole-body manipulation and locomotion tasks. Our findings reveal that state-of-the-art reinforcement learning algorithms struggle with most tasks, whereas a hierarchical learning approach achieves superior performance when supported by robust low-level policies, such as walking or reaching. With HumanoidBench, we provide the robotics community with a platform to identify the challenges arising when solving diverse tasks with humanoid robots, facilitating prompt verification of algorithms and ideas. The open-source code is available at https://humanoid-bench.github.io.
Read more6/21/2024