Cleaning Robots in Public Spaces: A Survey and Proposal for Benchmarking Based on Stakeholders Interviews

0

Sign in to get full access
Overview
- This paper presents a survey and proposal for benchmarking cleaning robots in public spaces based on interviews with stakeholders.
- The authors conducted interviews with experts in the field to understand the current state of cleaning robots, their challenges, and the needs of different stakeholders.
- The paper proposes a framework for benchmarking cleaning robots in public spaces, taking into account the diverse requirements and perspectives of various stakeholders.
Plain English Explanation
The paper explores the use of cleaning robots in public spaces, such as office buildings, hospitals, and shopping malls. The researchers conducted interviews with experts, including robot manufacturers, cleaning service providers, and facility managers, to get a better understanding of the current state of this technology and the challenges it faces.
Based on these interviews, the researchers propose a framework for benchmarking cleaning robots in public spaces. Benchmarking is the process of evaluating the performance of a product or service against a set of standards or criteria. In this case, the researchers want to develop a way to assess how well cleaning robots perform in real-world public settings, taking into account the needs and concerns of different stakeholders.
The goal of this framework is to help guide the development and deployment of cleaning robots in a way that addresses the diverse requirements of the people and organizations involved, such as building owners, cleaning staff, and the general public. By understanding the different perspectives and priorities of these stakeholders, the researchers hope to create a more comprehensive and effective system for evaluating the performance of cleaning robots in public spaces.
Technical Explanation
The paper starts by reviewing the related research on cleaning robots and the challenges they face in public environments. The authors then describe their methodology for conducting interviews with various stakeholders, including robot manufacturers, cleaning service providers, facility managers, and cleaning staff.
Through these interviews, the researchers identified key requirements and challenges for cleaning robots in public spaces, such as navigation in crowded environments, interaction with building occupants, safety and security concerns, and integration with existing cleaning workflows. The paper presents a detailed analysis of the insights gathered from the stakeholder interviews.
Based on these findings, the authors propose a framework for benchmarking cleaning robots in public spaces. This framework includes a set of performance metrics and test scenarios that can be used to evaluate the robots' capabilities in areas like navigation, object manipulation, and interaction with people. The researchers also discuss the need for standardized data collection and reporting to facilitate the comparison of different cleaning robot systems.
Critical Analysis
The paper provides a valuable contribution to the field of cleaning robotics by taking a comprehensive, stakeholder-centric approach to understanding the requirements and challenges in public spaces. The interviews with diverse stakeholders help to reveal the complex and often conflicting needs that must be addressed when deploying cleaning robots in these environments.
One potential limitation of the study is the relatively small sample size of the interviews, which may not fully capture the breadth of perspectives and experiences across different types of public spaces and organizations. Additionally, the paper does not delve into potential privacy concerns that could arise from the use of cleaning robots in public areas, which could be an important consideration for future research.
Overall, the proposed benchmarking framework seems promising, but its effectiveness would need to be validated through real-world deployments and testing. The authors acknowledge the need for further research and collaboration with industry partners to refine and implement this approach.
Conclusion
This paper presents a comprehensive survey and proposal for benchmarking cleaning robots in public spaces, based on in-depth interviews with various stakeholders. The researchers have identified key requirements and challenges facing this technology, and have proposed a framework to guide the development and evaluation of cleaning robots in a way that addresses the diverse needs of building owners, cleaning staff, and the public.
While there are some limitations to the study, the authors have laid the groundwork for a more systematic and inclusive approach to deploying cleaning robots in real-world public environments. This research has the potential to inform the design, testing, and deployment of more effective and user-friendly cleaning robots that can enhance the cleanliness and safety of public spaces.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Cleaning Robots in Public Spaces: A Survey and Proposal for Benchmarking Based on Stakeholders Interviews
Raphael Memmesheimer, Martina Overbeck, Bjoern Kral, Lea Steffen, Sven Behnke, Martin Gersch, Arne Roennau
Autonomous cleaning robots for public spaces have potential for addressing current societal challenges, such as labor shortages and cleanliness in public spaces. Other application domains like autonomous driving, bin picking, or search and rescue have shown that benchmarking platforms and approaches in competitive settings can advance their respective research fields, resulting in more applicable systems under real-world conditions. For this paper, we analyzed seven semi-structured, qualitative stakeholder interviews about outdoor cleaning, identified current needs as well as limitations, and considered those results for the development of a benchmarking scenario based on the previous observations.
Read more7/24/2024
0
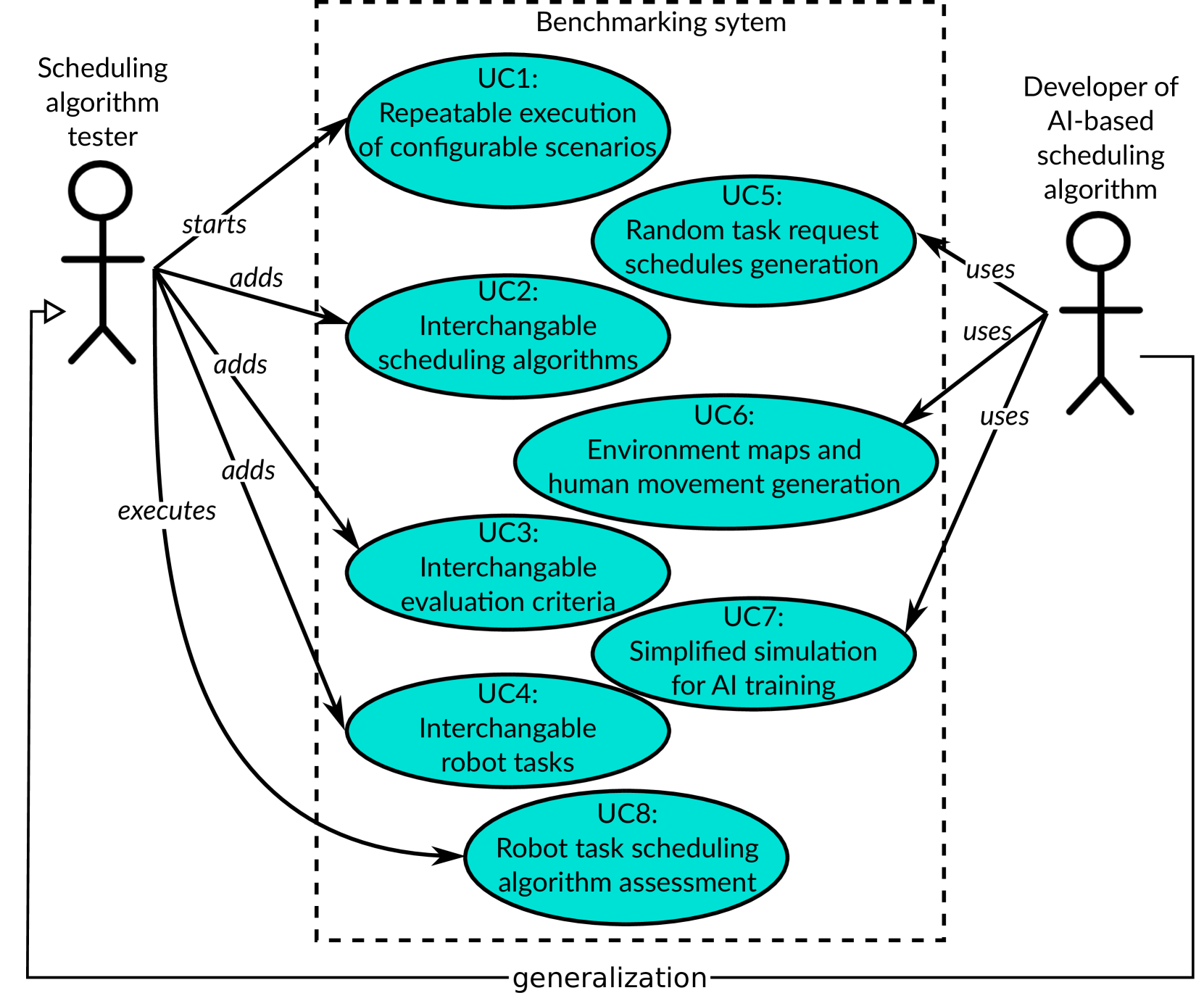
A framework for training and benchmarking algorithms that schedule robot tasks
Wojciech Dudek, Daniel Gie{l}dowski, Tomasz Winiarski
Service robots work in a changing environment habited by exogenous agents like humans. In the service robotics domain, lots of uncertainties result from exogenous actions and inaccurate localisation of objects and the robot itself. This makes the robot task scheduling problem incredibly challenging. In this article, we propose a benchmarking system for systematically assessing the performance of algorithms scheduling robot tasks. The robot environment incorporates a room map, furniture, transportable objects, and moving humans; the system defines interfaces for the algorithms, tasks to be executed, and evaluation methods. The system consists of several tools, easing testing scenario generation for training AI-based scheduling algorithms and statistical testing. For benchmarking purposes, a set of scenarios is chosen, and the performance of several scheduling algorithms is assessed. The system source is published to serve the community for tuning and comparable assessment of robot task scheduling algorithms for service robots.
Read more9/2/2024
🌐
0
Field Notes on Deploying Research Robots in Public Spaces
Fanjun Bu, Alexandra Bremers, Mark Colley, Wendy Ju
Human-robot interaction requires to be studied in the wild. In the summers of 2022 and 2023, we deployed two trash barrel service robots through the wizard-of-oz protocol in public spaces to study human-robot interactions in urban settings. We deployed the robots at two different public plazas in downtown Manhattan and Brooklyn for a collective of 20 hours of field time. To date, relatively few long-term human-robot interaction studies have been conducted in shared public spaces. To support researchers aiming to fill this gap, we would like to share some of our insights and learned lessons that would benefit both researchers and practitioners on how to deploy robots in public spaces. We share best practices and lessons learned with the HRI research community to encourage more in-the-wild research of robots in public spaces and call for the community to share their lessons learned to a GitHub repository.
Read more4/30/2024
🐍
0
Investigating the Privacy Risk of Using Robot Vacuum Cleaners in Smart Environments
Benjamin Ulsmaag, Jia-Chun Lin, Ming-Chang Lee
Robot vacuum cleaners have become increasingly popular and are widely used in various smart environments. To improve user convenience, manufacturers also introduced smartphone applications that enable users to customize cleaning settings or access information about their robot vacuum cleaners. While this integration enhances the interaction between users and their robot vacuum cleaners, it results in potential privacy concerns because users' personal information may be exposed. To address these concerns, end-to-end encryption is implemented between the application, cloud service, and robot vacuum cleaners to secure the exchanged information. Nevertheless, network header metadata remains unencrypted and it is still vulnerable to network eavesdropping. In this paper, we investigate the potential risk of private information exposure through such metadata. A popular robot vacuum cleaner was deployed in a real smart environment where passive network eavesdropping was conducted during several selected cleaning events. Our extensive analysis, based on Association Rule Learning, demonstrates that it is feasible to identify certain events using only the captured Internet traffic metadata, thereby potentially exposing private user information and raising privacy concerns.
Read more7/29/2024