FRI-Net: Floorplan Reconstruction via Room-wise Implicit Representation

0
Sign in to get full access
Overview
- This paper proposes FRI-Net, a novel approach for reconstructing 2D floorplans from a single input image.
- FRI-Net uses a room-wise implicit representation to capture the geometric and semantic information of each room in the floorplan.
- The authors demonstrate the effectiveness of their method on various datasets and show improved performance compared to existing state-of-the-art techniques.
Plain English Explanation
FRI-Net is a system that can take a single image of a building's interior and reconstruct a 2D floorplan from it. The key idea is to model each room in the floorplan using an "implicit representation" - this means representing the room's shape and layout using a mathematical function rather than a traditional 3D mesh or set of coordinates.
By using this implicit representation, the system can capture important details about the rooms, like their size, shape, and position relative to each other. The authors show that this approach leads to better floorplan reconstructions compared to previous methods, which struggled to accurately represent the complex geometry and semantics of real-world buildings.
Technical Explanation
FRI-Net uses a deep neural network architecture to process the input image and produce the room-wise implicit representations. The network is composed of several stages:
- Feature Extraction: The input image is passed through a convolutional neural network to extract visual features.
- Room Segmentation: The extracted features are used to predict a segmentation map, where each pixel is classified as belonging to a particular room.
- Implicit Room Representation: For each identified room, an implicit function is predicted that encodes the room's geometric and semantic properties.
- Floorplan Reconstruction: The room-wise implicit representations are combined to reconstruct the final 2D floorplan.
The authors evaluate FRI-Net on several floorplan reconstruction datasets and show that it outperforms previous state-of-the-art methods, PolyRoom, Joint Stereo 3D Object Detection and Implicit Surface, and DEBSDF, in terms of both geometric and semantic accuracy.
Critical Analysis
The authors acknowledge several limitations of their approach. First, FRI-Net relies on the assumption that rooms can be accurately segmented in the input image, which may not always be the case in real-world scenarios. Additionally, the implicit room representations may struggle to capture complex room shapes and arrangements, particularly in highly irregular or cluttered floorplans.
Further research could explore techniques to better handle partial or occluded rooms, as well as methods to recover the 3D structure of the floorplan from the 2D reconstruction. Integrating FRI-Net with other 3D scene reconstruction or semantic segmentation approaches could also lead to more robust and comprehensive floorplan reconstruction systems.
Conclusion
FRI-Net presents a novel approach for reconstructing 2D floorplans from a single input image. By using a room-wise implicit representation, the system can effectively capture the geometric and semantic properties of each room, leading to more accurate floorplan reconstructions compared to previous methods. While the approach has some limitations, the techniques explored in this paper represent an important step forward in the field of scene understanding and 3D modeling from 2D visual data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FRI-Net: Floorplan Reconstruction via Room-wise Implicit Representation
Honghao Xu, Juzhan Xu, Zeyu Huang, Pengfei Xu, Hui Huang, Ruizhen Hu
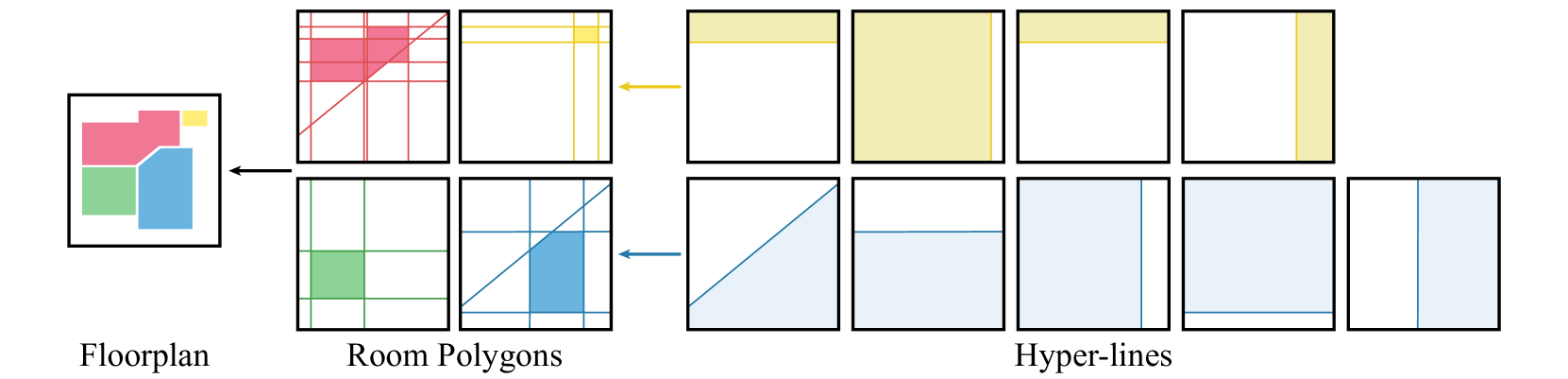
In this paper, we introduce a novel method called FRI-Net for 2D floorplan reconstruction from 3D point cloud. Existing methods typically rely on corner regression or box regression, which lack consideration for the global shapes of rooms. To address these issues, we propose a novel approach using a room-wise implicit representation with structural regularization to characterize the shapes of rooms in floorplans. By incorporating geometric priors of room layouts in floorplans into our training strategy, the generated room polygons are more geometrically regular. We have conducted experiments on two challenging datasets, Structured3D and SceneCAD. Our method demonstrates improved performance compared to state-of-the-art methods, validating the effectiveness of our proposed representation for floorplan reconstruction.
Read more7/16/2024

0
PolyRoom: Room-aware Transformer for Floorplan Reconstruction
Yuzhou Liu, Lingjie Zhu, Xiaodong Ma, Hanqiao Ye, Xiang Gao, Xianwei Zheng, Shuhan Shen
Reconstructing geometry and topology structures from raw unstructured data has always been an important research topic in indoor mapping research. In this paper, we aim to reconstruct the floorplan with a vectorized representation from point clouds. Despite significant advancements achieved in recent years, current methods still encounter several challenges, such as missing corners or edges, inaccuracies in corner positions or angles, self-intersecting or overlapping polygons, and potentially implausible topology. To tackle these challenges, we present PolyRoom, a room-aware Transformer that leverages uniform sampling representation, room-aware query initialization, and room-aware self-attention for floorplan reconstruction. Specifically, we adopt a uniform sampling floorplan representation to enable dense supervision during training and effective utilization of angle information. Additionally, we propose a room-aware query initialization scheme to prevent non-polygonal sequences and introduce room-aware self-attention to enhance memory efficiency and model performance. Experimental results on two widely used datasets demonstrate that PolyRoom surpasses current state-of-the-art methods both quantitatively and qualitatively. Our code is available at: https://github.com/3dv-casia/PolyRoom/.
Read more7/16/2024
🤷
0
Indoor Scene Reconstruction with Fine-Grained Details Using Hybrid Representation and Normal Prior Enhancement
Sheng Ye, Yubin Hu, Matthieu Lin, Yu-Hui Wen, Wang Zhao, Yong-Jin Liu, Wenping Wang
The reconstruction of indoor scenes from multi-view RGB images is challenging due to the coexistence of flat and texture-less regions alongside delicate and fine-grained regions. Recent methods leverage neural radiance fields aided by predicted surface normal priors to recover the scene geometry. These methods excel in producing complete and smooth results for floor and wall areas. However, they struggle to capture complex surfaces with high-frequency structures due to the inadequate neural representation and the inaccurately predicted normal priors. This work aims to reconstruct high-fidelity surfaces with fine-grained details by addressing the above limitations. To improve the capacity of the implicit representation, we propose a hybrid architecture to represent low-frequency and high-frequency regions separately. To enhance the normal priors, we introduce a simple yet effective image sharpening and denoising technique, coupled with a network that estimates the pixel-wise uncertainty of the predicted surface normal vectors. Identifying such uncertainty can prevent our model from being misled by unreliable surface normal supervisions that hinder the accurate reconstruction of intricate geometries. Experiments on the benchmark datasets show that our method outperforms existing methods in terms of reconstruction quality. Furthermore, the proposed method also generalizes well to real-world indoor scenarios captured by our hand-held mobile phones. Our code is publicly available at: https://github.com/yec22/Fine-Grained-Indoor-Recon.
Read more8/14/2024

0
Self-training Room Layout Estimation via Geometry-aware Ray-casting
Bolivar Solarte, Chin-Hsuan Wu, Jin-Cheng Jhang, Jonathan Lee, Yi-Hsuan Tsai, Min Sun
In this paper, we introduce a novel geometry-aware self-training framework for room layout estimation models on unseen scenes with unlabeled data. Our approach utilizes a ray-casting formulation to aggregate multiple estimates from different viewing positions, enabling the computation of reliable pseudo-labels for self-training. In particular, our ray-casting approach enforces multi-view consistency along all ray directions and prioritizes spatial proximity to the camera view for geometry reasoning. As a result, our geometry-aware pseudo-labels effectively handle complex room geometries and occluded walls without relying on assumptions such as Manhattan World or planar room walls. Evaluation on publicly available datasets, including synthetic and real-world scenarios, demonstrates significant improvements in current state-of-the-art layout models without using any human annotation.
Read more7/23/2024