Indoor Scene Reconstruction with Fine-Grained Details Using Hybrid Representation and Normal Prior Enhancement

0
🤷
Sign in to get full access
Overview
- Reconstructing indoor scenes from multi-view RGB images is challenging due to the mix of flat, texture-less regions and delicate, fine-grained areas.
- Recent methods use neural radiance fields with predicted surface normal priors to recover scene geometry, but struggle to capture complex surfaces with high-frequency structures.
- This work aims to address these limitations and reconstruct high-fidelity surfaces with fine-grained details.
Plain English Explanation
The goal of this research is to improve indoor scene reconstruction from photographs. Capturing the full 3D geometry of an indoor space from multiple camera views is difficult because some areas, like floors and walls, are flat and featureless, while others have a lot of fine details, like intricate furniture or decorations.
Recent techniques have used a neural radiance field - a way of representing the 3D scene as a machine learning model - along with predicted surface normal vectors to reconstruct the overall geometry. While this works well for the simpler regions, it struggles to capture the complex, high-frequency details.
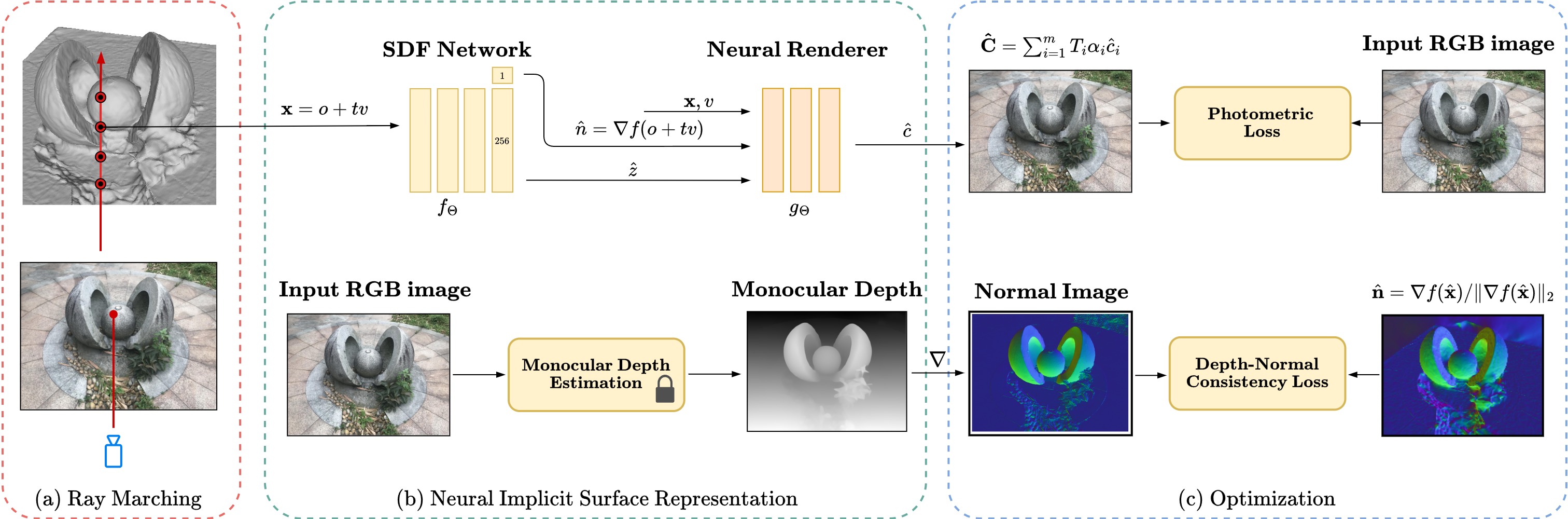
This paper proposes a new approach to address these limitations. It uses a hybrid architecture to represent low and high-frequency areas separately, and introduces a technique to improve the surface normal predictions, including estimating the uncertainty of those predictions. This allows the model to focus on accurately reconstructing the intricate geometries, rather than being misled by unreliable normal information.
Technical Explanation
To improve the quality of indoor scene reconstruction, this work proposes several key innovations:
Hybrid Representation: The authors introduce a hybrid architecture that can represent both low-frequency and high-frequency regions of the 3D scene separately. This allows the model to better capture the fine-grained details while still maintaining an accurate overall geometry.
Enhanced Normal Priors: The researchers develop a technique to sharpen and denoise the predicted surface normal vectors, which are used as priors to guide the 3D reconstruction. They also train a network to estimate the pixel-wise uncertainty of these normal predictions. This helps the model avoid being misled by inaccurate normal information, particularly in complex areas.
Experiments: The proposed method is evaluated on benchmark indoor scene datasets, where it is shown to outperform existing reconstruction techniques in terms of reconstruction quality and ability to capture fine details. The approach also generalizes well to real-world indoor scenes captured using handheld mobile devices.
Critical Analysis
The key strength of this work is its ability to reconstruct high-fidelity 3D indoor scenes with fine-grained details, which is a challenging problem that current methods struggle with. The authors' innovations around hybrid representations and enhanced normal priors appear to be effective solutions.
However, the paper does not discuss potential limitations or caveats of the proposed approach. For example, it's unclear how the method would perform in very large or cluttered indoor environments, or how sensitive it is to factors like lighting conditions or camera parameters.
Additionally, while the experiments demonstrate impressive qualitative and quantitative results, the authors could have provided deeper insights into the reasons behind the performance gains, such as an ablation study to isolate the contributions of each technical component.
Overall, this is a promising piece of research that advances the state-of-the-art in indoor scene reconstruction. Further exploration of the method's robustness and generalizability could help solidify its real-world applicability.
Conclusion
This research presents a novel approach to reconstructing high-fidelity 3D models of indoor scenes from multi-view RGB images. By using a hybrid representation and enhancing the surface normal priors, the method is able to capture fine-grained geometric details that challenge existing techniques.
The demonstrated improvements in reconstruction quality, as well as the ability to generalize to real-world scenarios, suggest that this work could have significant practical implications for applications like virtual reality, robotics, and architectural design. As the field of 3D scene understanding continues to evolve, innovations like those introduced in this paper will play a crucial role in bringing these technologies closer to widespread deployment.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
0
Indoor Scene Reconstruction with Fine-Grained Details Using Hybrid Representation and Normal Prior Enhancement
Sheng Ye, Yubin Hu, Matthieu Lin, Yu-Hui Wen, Wang Zhao, Yong-Jin Liu, Wenping Wang
The reconstruction of indoor scenes from multi-view RGB images is challenging due to the coexistence of flat and texture-less regions alongside delicate and fine-grained regions. Recent methods leverage neural radiance fields aided by predicted surface normal priors to recover the scene geometry. These methods excel in producing complete and smooth results for floor and wall areas. However, they struggle to capture complex surfaces with high-frequency structures due to the inadequate neural representation and the inaccurately predicted normal priors. This work aims to reconstruct high-fidelity surfaces with fine-grained details by addressing the above limitations. To improve the capacity of the implicit representation, we propose a hybrid architecture to represent low-frequency and high-frequency regions separately. To enhance the normal priors, we introduce a simple yet effective image sharpening and denoising technique, coupled with a network that estimates the pixel-wise uncertainty of the predicted surface normal vectors. Identifying such uncertainty can prevent our model from being misled by unreliable surface normal supervisions that hinder the accurate reconstruction of intricate geometries. Experiments on the benchmark datasets show that our method outperforms existing methods in terms of reconstruction quality. Furthermore, the proposed method also generalizes well to real-world indoor scenarios captured by our hand-held mobile phones. Our code is publicly available at: https://github.com/yec22/Fine-Grained-Indoor-Recon.
Read more8/14/2024
0
Normal-guided Detail-Preserving Neural Implicit Functions for High-Fidelity 3D Surface Reconstruction
Aarya Patel, Hamid Laga, Ojaswa Sharma
Neural implicit representations have emerged as a powerful paradigm for 3D reconstruction. However, despite their success, existing methods fail to capture fine geometric details and thin structures, especially in scenarios where only sparse RGB views of the objects of interest are available. We hypothesize that current methods for learning neural implicit representations from RGB or RGBD images produce 3D surfaces with missing parts and details because they only rely on 0-order differential properties, i.e. the 3D surface points and their projections, as supervisory signals. Such properties, however, do not capture the local 3D geometry around the points and also ignore the interactions between points. This paper demonstrates that training neural representations with first-order differential properties, i.e. surface normals, leads to highly accurate 3D surface reconstruction even in situations where only as few as two RGB (front and back) images are available. Given multiview RGB images of an object of interest, we first compute the approximate surface normals in the image space using the gradient of the depth maps produced using an off-the-shelf monocular depth estimator such as Depth Anything model. An implicit surface regressor is then trained using a loss function that enforces the first-order differential properties of the regressed surface to match those estimated from Depth Anything. Our extensive experiments on a wide range of real and synthetic datasets show that the proposed method achieves an unprecedented level of reconstruction accuracy even when using as few as two RGB views. The detailed ablation study also demonstrates that normal-based supervision plays a key role in this significant improvement in performance, enabling the 3D reconstruction of intricate geometric details and thin structures that were previously challenging to capture.
Read more6/10/2024
🧠
0
DebSDF: Delving into the Details and Bias of Neural Indoor Scene Reconstruction
Yuting Xiao, Jingwei Xu, Zehao Yu, Shenghua Gao
In recent years, the neural implicit surface has emerged as a powerful representation for multi-view surface reconstruction due to its simplicity and state-of-the-art performance. However, reconstructing smooth and detailed surfaces in indoor scenes from multi-view images presents unique challenges. Indoor scenes typically contain large texture-less regions, making the photometric loss unreliable for optimizing the implicit surface. Previous work utilizes monocular geometry priors to improve the reconstruction in indoor scenes. However, monocular priors often contain substantial errors in thin structure regions due to domain gaps and the inherent inconsistencies when derived independently from different views. This paper presents textbf{DebSDF} to address these challenges, focusing on the utilization of uncertainty in monocular priors and the bias in SDF-based volume rendering. We propose an uncertainty modeling technique that associates larger uncertainties with larger errors in the monocular priors. High-uncertainty priors are then excluded from optimization to prevent bias. This uncertainty measure also informs an importance-guided ray sampling and adaptive smoothness regularization, enhancing the learning of fine structures. We further introduce a bias-aware signed distance function to density transformation that takes into account the curvature and the angle between the view direction and the SDF normals to reconstruct fine details better. Our approach has been validated through extensive experiments on several challenging datasets, demonstrating improved qualitative and quantitative results in reconstructing thin structures in indoor scenes, thereby outperforming previous work.
Read more7/12/2024
0
FRI-Net: Floorplan Reconstruction via Room-wise Implicit Representation
Honghao Xu, Juzhan Xu, Zeyu Huang, Pengfei Xu, Hui Huang, Ruizhen Hu
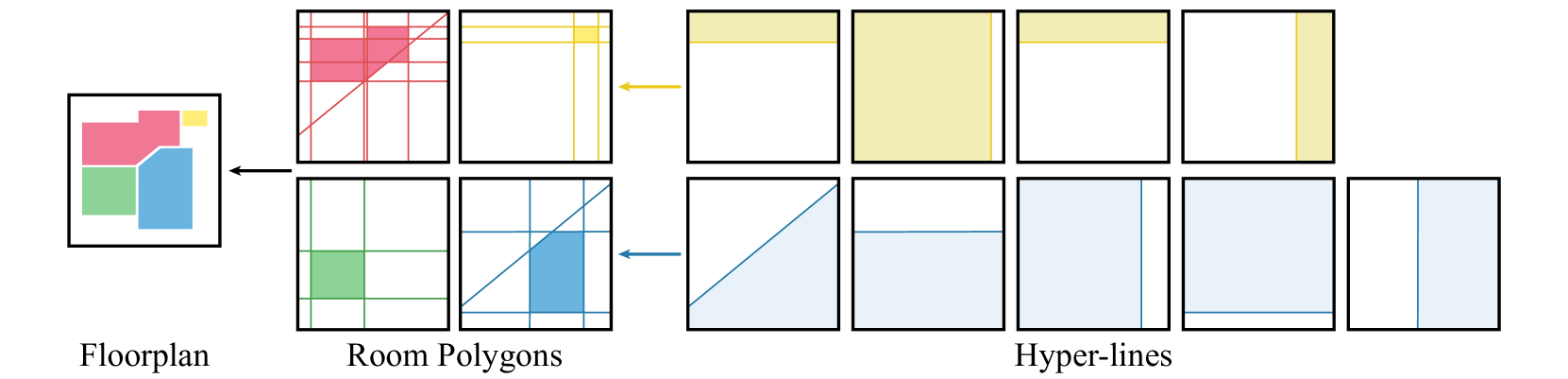
In this paper, we introduce a novel method called FRI-Net for 2D floorplan reconstruction from 3D point cloud. Existing methods typically rely on corner regression or box regression, which lack consideration for the global shapes of rooms. To address these issues, we propose a novel approach using a room-wise implicit representation with structural regularization to characterize the shapes of rooms in floorplans. By incorporating geometric priors of room layouts in floorplans into our training strategy, the generated room polygons are more geometrically regular. We have conducted experiments on two challenging datasets, Structured3D and SceneCAD. Our method demonstrates improved performance compared to state-of-the-art methods, validating the effectiveness of our proposed representation for floorplan reconstruction.
Read more7/16/2024