Fusing Structure from Motion and Simulation-Augmented Pose Regression from Optical Flow for Challenging Indoor Environments

0
↗️
Sign in to get full access
Overview
- This paper addresses the challenge of accurately localizing objects using monocular visual cameras, which is crucial for applications like robotics, virtual/augmented reality, and warehouse logistics.
- The paper explores the use of relative pose regression (RPR) methods to complement absolute pose regression (APR) approaches, which can struggle in environments with motion blur, lighting changes, repetitive patterns, and feature-less structures.
- The proposed solution involves fusing the absolute and relative pose predictions using recurrent fusion networks, which can optimally align the global and local coordinate systems.
Plain English Explanation
Localizing objects is crucial for many technology applications, like robots navigating a room or virtual reality experiences. Recent advances in deep learning have enabled object localization using a single camera. However, this can be challenging in complex environments with issues like blurry motion, changing lighting, repeating patterns, or lack of distinct features.
This study combines two approaches to address these challenges. The first method, absolute pose regression (APR), learns a semantic understanding of the environment through neural networks to predict the object's absolute position and orientation. The second method, relative pose regression (RPR), estimates the relative change in position and orientation between consecutive camera views by analyzing the optical flow between images.
Fusing the absolute and relative pose predictions is tricky because they use different coordinate systems. The researchers propose using recurrent fusion networks to optimally align these predictions and improve the overall localization accuracy. They also create a simulated training environment and collect a large real-world dataset in a warehouse-like setting to better train and evaluate their approach.
Technical Explanation
The paper explores the fusion of absolute pose regression (APR) and relative pose regression (RPR) methods to address the limitations of each approach. APR can struggle with environmental challenges like motion blur and feature-less structures, while RPR has its own difficulties with motion blur.
The proposed solution involves computing the optical flow between consecutive images using the Lucas-Kanade algorithm and predicting the relative pose change using a small recurrent convolutional network. To fuse the absolute and relative pose predictions, the authors explore eight different recurrent units and construct a simulation environment for pre-training the APR and RPR networks.
Additionally, the researchers record a large dataset in a challenging, large-scale indoor environment that mimics a warehouse with transportation robots. They conduct hyperparameter searches and experiments to demonstrate the effectiveness of their recurrent fusion method compared to state-of-the-art pose graph optimization (PGO) techniques.
Critical Analysis
The paper presents a novel approach to address the limitations of both APR and RPR methods by fusing their predictions using recurrent fusion networks. This is a promising direction, as leveraging image matching and uncertainty estimation can help improve the overall localization accuracy.
However, the paper does not provide a detailed analysis of the limitations or potential drawbacks of the recurrent fusion approach. It would be helpful to understand the scenarios where this method may struggle, such as extreme lighting conditions or highly dynamic environments. Additionally, the computational complexity and real-time performance of the proposed solution are not thoroughly discussed.
Further research could explore the generalization of the recurrent fusion networks to different types of environments and applications, as well as investigate the integration of additional sensors or contextual information to enhance the localization capabilities.
Conclusion
This study presents a novel approach to improve object localization by fusing absolute and relative pose predictions using recurrent fusion networks. The proposed method demonstrates promising results in challenging indoor environments, such as warehouses, by addressing the limitations of existing APR and RPR techniques.
The fusion of global and local pose information through recurrent networks is a valuable contribution to the field of visual localization, with potential applications in robotics, augmented reality, and efficient warehouse logistics. Further research in this direction could lead to more robust and adaptable object localization systems that can perform reliably in a wide range of real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
Fusing Structure from Motion and Simulation-Augmented Pose Regression from Optical Flow for Challenging Indoor Environments
Felix Ott, Lucas Heublein, David Rugamer, Bernd Bischl, Christopher Mutschler
The localization of objects is a crucial task in various applications such as robotics, virtual and augmented reality, and the transportation of goods in warehouses. Recent advances in deep learning have enabled the localization using monocular visual cameras. While structure from motion (SfM) predicts the absolute pose from a point cloud, absolute pose regression (APR) methods learn a semantic understanding of the environment through neural networks. However, both fields face challenges caused by the environment such as motion blur, lighting changes, repetitive patterns, and feature-less structures. This study aims to address these challenges by incorporating additional information and regularizing the absolute pose using relative pose regression (RPR) methods. RPR methods suffer under different challenges, i.e., motion blur. The optical flow between consecutive images is computed using the Lucas-Kanade algorithm, and the relative pose is predicted using an auxiliary small recurrent convolutional network. The fusion of absolute and relative poses is a complex task due to the mismatch between the global and local coordinate systems. State-of-the-art methods fusing absolute and relative poses use pose graph optimization (PGO) to regularize the absolute pose predictions using relative poses. In this work, we propose recurrent fusion networks to optimally align absolute and relative pose predictions to improve the absolute pose prediction. We evaluate eight different recurrent units and construct a simulation environment to pre-train the APR and RPR networks for better generalized training. Additionally, we record a large database of different scenarios in a challenging large-scale indoor environment that mimics a warehouse with transportation robots. We conduct hyperparameter searches and experiments to show the effectiveness of our recurrent fusion method compared to PGO.
Read more6/11/2024

0
Map-Relative Pose Regression for Visual Re-Localization
Shuai Chen, Tommaso Cavallari, Victor Adrian Prisacariu, Eric Brachmann
Pose regression networks predict the camera pose of a query image relative to a known environment. Within this family of methods, absolute pose regression (APR) has recently shown promising accuracy in the range of a few centimeters in position error. APR networks encode the scene geometry implicitly in their weights. To achieve high accuracy, they require vast amounts of training data that, realistically, can only be created using novel view synthesis in a days-long process. This process has to be repeated for each new scene again and again. We present a new approach to pose regression, map-relative pose regression (marepo), that satisfies the data hunger of the pose regression network in a scene-agnostic fashion. We condition the pose regressor on a scene-specific map representation such that its pose predictions are relative to the scene map. This allows us to train the pose regressor across hundreds of scenes to learn the generic relation between a scene-specific map representation and the camera pose. Our map-relative pose regressor can be applied to new map representations immediately or after mere minutes of fine-tuning for the highest accuracy. Our approach outperforms previous pose regression methods by far on two public datasets, indoor and outdoor. Code is available: https://nianticlabs.github.io/marepo
Read more4/16/2024
0
Learning Neural Volumetric Pose Features for Camera Localization
Jingyu Lin, Jiaqi Gu, Bojian Wu, Lubin Fan, Renjie Chen, Ligang Liu, Jieping Ye
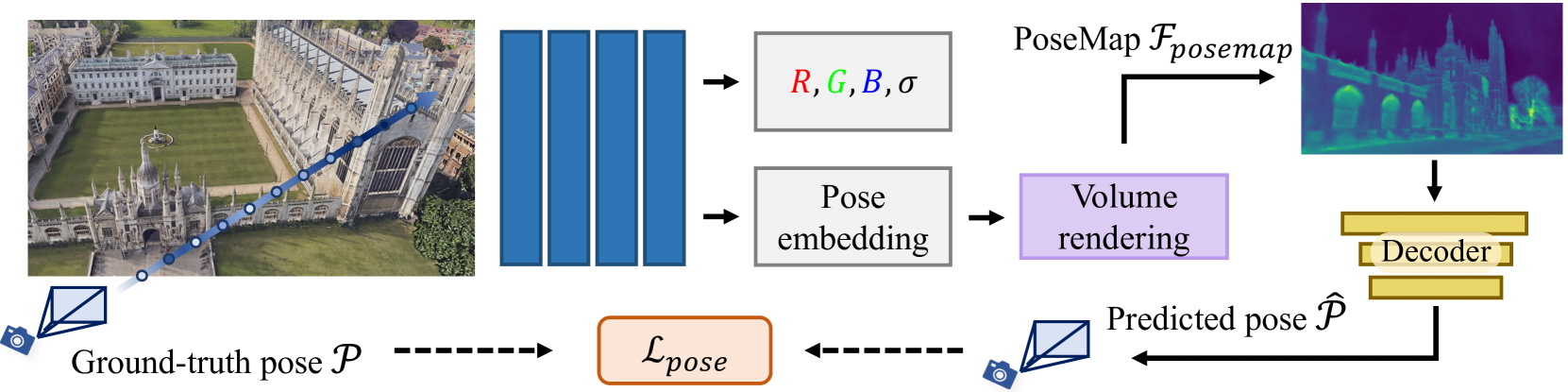
We introduce a novel neural volumetric pose feature, termed PoseMap, designed to enhance camera localization by encapsulating the information between images and the associated camera poses. Our framework leverages an Absolute Pose Regression (APR) architecture, together with an augmented NeRF module. This integration not only facilitates the generation of novel views to enrich the training dataset but also enables the learning of effective pose features. Additionally, we extend our architecture for self-supervised online alignment, allowing our method to be used and fine-tuned for unlabelled images within a unified framework. Experiments demonstrate that our method achieves 14.28% and 20.51% performance gain on average in indoor and outdoor benchmark scenes, outperforming existing APR methods with state-of-the-art accuracy.
Read more7/15/2024
↗️
0
KS-APR: Keyframe Selection for Robust Absolute Pose Regression
Changkun Liu, Yukun Zhao, Tristan Braud
Markerless Mobile Augmented Reality (AR) aims to anchor digital content in the physical world without using specific 2D or 3D objects. Absolute Pose Regressors (APR) are end-to-end machine learning solutions that infer the device's pose from a single monocular image. Thanks to their low computation cost, they can be directly executed on the constrained hardware of mobile AR devices. However, APR methods tend to yield significant inaccuracies for input images that are too distant from the training set. This paper introduces KS-APR, a pipeline that assesses the reliability of an estimated pose with minimal overhead by combining the inference results of the APR and the prior images in the training set. Mobile AR systems tend to rely upon visual-inertial odometry to track the relative pose of the device during the experience. As such, KS-APR favours reliability over frequency, discarding unreliable poses. This pipeline can integrate most existing APR methods to improve accuracy by filtering unreliable images with their pose estimates. We implement the pipeline on three types of APR models on indoor and outdoor datasets. The median error on position and orientation is reduced for all models, and the proportion of large errors is minimized across datasets. Our method enables state-of-the-art APRs such as DFNetdm to outperform single-image and sequential APR methods. These results demonstrate the scalability and effectiveness of KS-APR for visual localization tasks that do not require one-shot decisions.
Read more4/30/2024