Game4Loc: A UAV Geo-Localization Benchmark from Game Data

0

Sign in to get full access
Overview
- The paper introduces a new dataset called "Game4Loc" for training and evaluating UAV (Unmanned Aerial Vehicle) geo-localization models.
- The dataset is generated from game data, allowing for collection of large-scale training samples in a cost-effective manner.
- The paper evaluates the performance of several state-of-the-art geo-localization models on the Game4Loc dataset, providing insights into their strengths and weaknesses.
Plain English Explanation
The researchers have created a new dataset called "Game4Loc" that can be used to train and test UAV geo-localization models. Geo-localization is the process of determining the geographic location of an object, such as a drone, based on visual information.
The key innovation of Game4Loc is that it is generated from video game data, rather than real-world images. This allows the researchers to collect a large amount of training data in a cost-effective way, as it is much cheaper to generate synthetic data in a game than to capture real-world images from drones.
The researchers then evaluate how well several state-of-the-art geo-localization models perform on the Game4Loc dataset. This provides insights into the strengths and weaknesses of these models, which can help guide future research and development in this area.
Technical Explanation
The paper introduces a new dataset called "Game4Loc" for training and evaluating UAV geo-localization models. The dataset is generated from video game data, allowing the researchers to collect a large-scale training set in a cost-effective manner.
To create the dataset, the researchers developed a procedural generation pipeline to automatically generate realistic 3D game environments and camera trajectories. This allowed them to capture millions of labeled training samples, where each sample consists of a camera image and its corresponding geographic location.
The paper then evaluates the performance of several state-of-the-art geo-localization models on the Game4Loc dataset. The models tested include methods based on edge detection and long-range vision. The results provide insights into the strengths and weaknesses of these approaches, highlighting areas for future improvement.
Critical Analysis
The Game4Loc dataset and benchmarking approach presented in this paper have several strengths. The use of video game data allows for the collection of a large-scale training set in a cost-effective manner, which is a key challenge in developing high-performing geo-localization models.
However, the paper also acknowledges certain limitations of the dataset. For example, the game environments may not fully capture the complexity and diversity of real-world scenes that UAVs would encounter. Additionally, the paper notes that the simulated camera trajectories may not match the actual flight paths of real UAVs.
Further research is needed to understand how well models trained on Game4Loc would generalize to real-world UAV applications. Potential future work could involve incorporating more diverse game environments, validating the models on real-world UAV data, or exploring ways to bridge the gap between simulated and real-world geo-localization scenarios.
Conclusion
The Game4Loc dataset and benchmark presented in this paper provide a valuable new resource for developing and evaluating UAV geo-localization models. By leveraging video game data, the researchers have been able to collect a large-scale training set in a cost-effective manner. The evaluation of state-of-the-art models on this dataset offers insights that can guide future research and development in this important field of aerial robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Game4Loc: A UAV Geo-Localization Benchmark from Game Data
Yuxiang Ji, Boyong He, Zhuoyue Tan, Liaoni Wu
The vision-based geo-localization technology for UAV, serving as a secondary source of GPS information in addition to the global navigation satellite systems (GNSS), can still operate independently in the GPS-denied environment. Recent deep learning based methods attribute this as the task of image matching and retrieval. By retrieving drone-view images in geo-tagged satellite image database, approximate localization information can be obtained. However, due to high costs and privacy concerns, it is usually difficult to obtain large quantities of drone-view images from a continuous area. Existing drone-view datasets are mostly composed of small-scale aerial photography with a strong assumption that there exists a perfect one-to-one aligned reference image for any query, leaving a significant gap from the practical localization scenario. In this work, we construct a large-range contiguous area UAV geo-localization dataset named GTA-UAV, featuring multiple flight altitudes, attitudes, scenes, and targets using modern computer games. Based on this dataset, we introduce a more practical UAV geo-localization task including partial matches of cross-view paired data, and expand the image-level retrieval to the actual localization in terms of distance (meters). For the construction of drone-view and satellite-view pairs, we adopt a weight-based contrastive learning approach, which allows for effective learning while avoiding additional post-processing matching steps. Experiments demonstrate the effectiveness of our data and training method for UAV geo-localization, as well as the generalization capabilities to real-world scenarios.
Read more9/26/2024
0
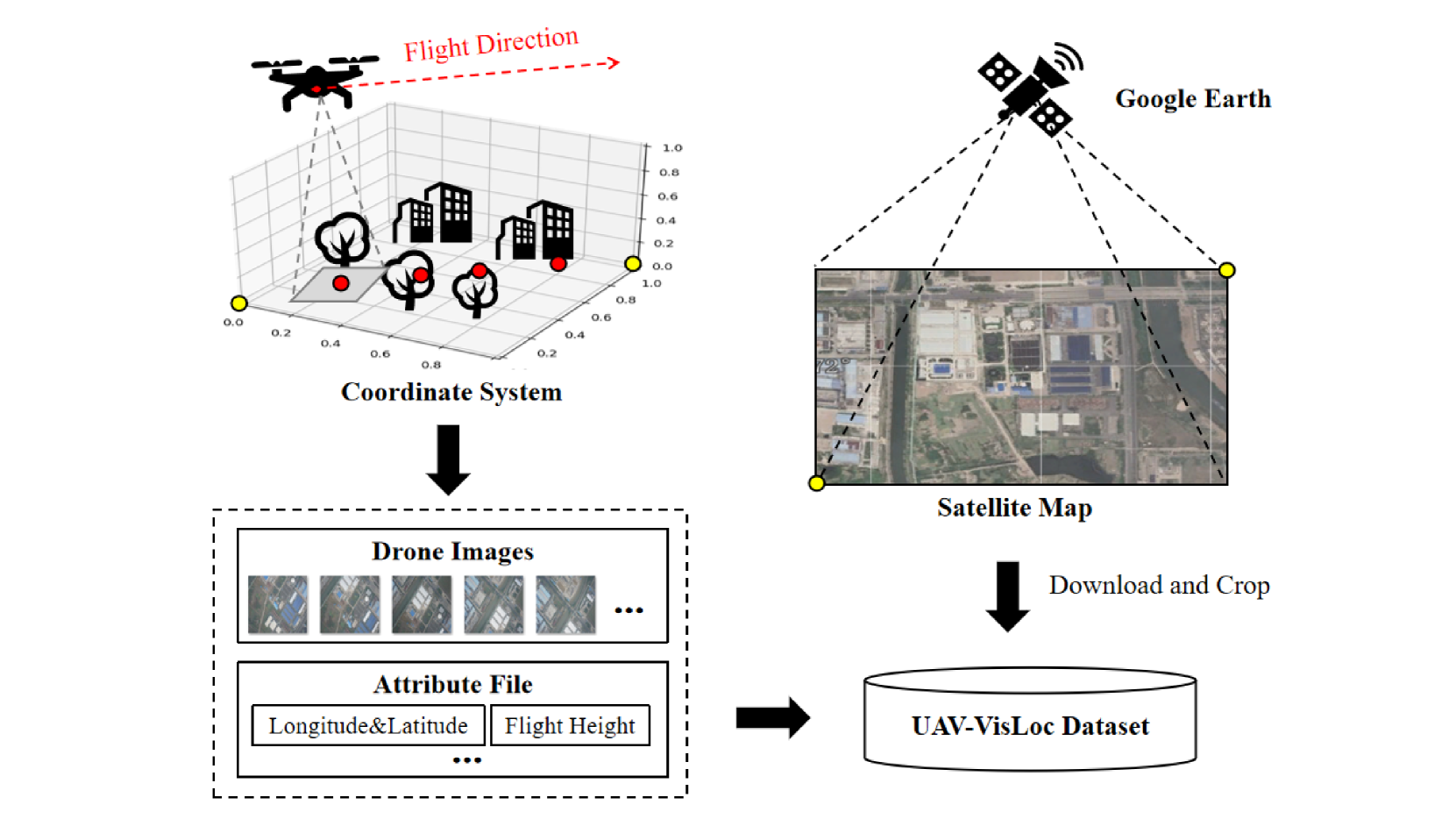
UAV-VisLoc: A Large-scale Dataset for UAV Visual Localization
Wenjia Xu, Yaxuan Yao, Jiaqi Cao, Zhiwei Wei, Chunbo Liu, Jiuniu Wang, Mugen Peng
The application of unmanned aerial vehicles (UAV) has been widely extended recently. It is crucial to ensure accurate latitude and longitude coordinates for UAVs, especially when the global navigation satellite systems (GNSS) are disrupted and unreliable. Existing visual localization methods achieve autonomous visual localization without error accumulation by matching the ground-down view image of UAV with the ortho satellite maps. However, collecting UAV ground-down view images across diverse locations is costly, leading to a scarcity of large-scale datasets for real-world scenarios. Existing datasets for UAV visual localization are often limited to small geographic areas or are focused only on urban regions with distinct textures. To address this, we define the UAV visual localization task by determining the UAV's real position coordinates on a large-scale satellite map based on the captured ground-down view. In this paper, we present a large-scale dataset, UAV-VisLoc, to facilitate the UAV visual localization task. This dataset comprises images from diverse drones across 11 locations in China, capturing a range of topographical features. The dataset features images from fixed-wing drones and multi-terrain drones, captured at different altitudes and orientations. Our dataset includes 6,742 drone images and 11 satellite maps, with metadata such as latitude, longitude, altitude, and capture date. Our dataset is tailored to support both the training and testing of models by providing a diverse and extensive data.
Read more5/21/2024
🌿
0
Towards Natural Language-Guided Drones: GeoText-1652 Benchmark with Spatial Relation Matching
Meng Chu, Zhedong Zheng, Wei Ji, Tingyu Wang, Tat-Seng Chua
Navigating drones through natural language commands remains challenging due to the dearth of accessible multi-modal datasets and the stringent precision requirements for aligning visual and textual data. To address this pressing need, we introduce GeoText-1652, a new natural language-guided geo-localization benchmark. This dataset is systematically constructed through an interactive human-computer process leveraging Large Language Model (LLM) driven annotation techniques in conjunction with pre-trained vision models. GeoText-1652 extends the established University-1652 image dataset with spatial-aware text annotations, thereby establishing one-to-one correspondences between image, text, and bounding box elements. We further introduce a new optimization objective to leverage fine-grained spatial associations, called blending spatial matching, for region-level spatial relation matching. Extensive experiments reveal that our approach maintains a competitive recall rate comparing other prevailing cross-modality methods. This underscores the promising potential of our approach in elevating drone control and navigation through the seamless integration of natural language commands in real-world scenarios.
Read more8/1/2024
0
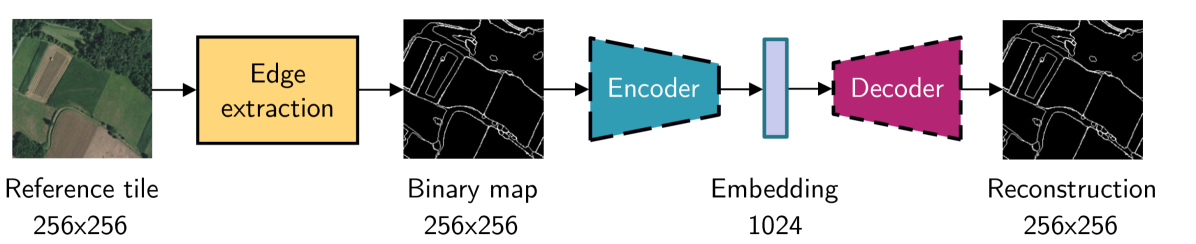
Leveraging edge detection and neural networks for better UAV localization
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Read more6/4/2024