Geometry-Informed Distance Candidate Selection for Adaptive Lightweight Omnidirectional Stereo Vision with Fisheye Images

0
Sign in to get full access
Overview
- This paper presents a novel approach for geometry-informed distance candidate selection in adaptive lightweight omnidirectional stereo vision using fisheye images.
- The proposed method aims to improve the efficiency and accuracy of stereo vision systems by leveraging the geometric properties of fisheye cameras.
- The authors introduce a geometry-informed distance candidate selection algorithm that selects a reduced set of disparity candidates, leading to a more lightweight and adaptive stereo vision pipeline.
Plain English Explanation
Stereo vision is a technique used to estimate the depth or distance of objects in a scene by using two or more cameras. This is commonly used in applications like robot navigation, augmented reality, and 3D reconstruction. However, traditional stereo vision systems can be computationally expensive, especially when dealing with wide-angle or "fisheye" cameras that capture a very large field of view.
To address this, the researchers in this paper have developed a new approach that uses the geometric properties of fisheye cameras to more efficiently select the disparity (depth) candidates that need to be considered. [This is similar to how the GOMVS and GISR methods use geometry to improve multi-view and single-view 3D reconstruction, respectively.] By reducing the number of disparity candidates, the stereo vision system becomes more lightweight and can run more efficiently, without sacrificing accuracy.
The key idea is to leverage the geometric properties of fisheye lenses to intelligently select a smaller set of disparity candidates that are most likely to contain the true depth values. This helps the stereo matching algorithm focus its computational efforts on the most relevant depth information, leading to faster and more efficient depth estimation.
Technical Explanation
The paper introduces a "geometry-informed distance candidate selection" algorithm for adaptive lightweight omnidirectional stereo vision using fisheye images. The core idea is to leverage the geometric properties of fisheye cameras to intelligently select a reduced set of disparity candidates, which are the possible depth values that the stereo matching algorithm needs to consider.
Traditionally, stereo vision systems would evaluate a large number of disparity candidates to find the true depth values in a scene. However, this can be computationally expensive, especially when dealing with the wide field of view and distortion of fisheye cameras. [Similar to how the IMU-Aided Event-based Stereo Visual Odometry and COIN-LIO methods use additional sensor modalities to improve efficiency and robustness.]
The proposed geometry-informed distance candidate selection algorithm first computes the epipolar geometry between the left and right fisheye images. It then uses this geometric information to define a region of interest (ROI) in the disparity space, which contains the most likely depth values. By only evaluating disparity candidates within this ROI, the authors are able to significantly reduce the computational load of the stereo matching process, while maintaining high accuracy.
The paper demonstrates the effectiveness of this approach through extensive experiments on both synthetic and real-world fisheye image datasets. The results show that the proposed method can achieve comparable depth estimation accuracy to traditional stereo vision pipelines, but with a much lower computational cost and memory footprint.
Critical Analysis
The authors have presented a well-designed and thorough evaluation of their proposed geometry-informed distance candidate selection algorithm for lightweight omnidirectional stereo vision. The use of fisheye cameras and the associated geometric challenges are well-motivated, and the authors have demonstrated the advantages of their approach compared to more traditional stereo vision methods.
One potential limitation of the work is that it focuses solely on depth estimation, and does not consider other important aspects of 3D scene understanding, such as object detection, segmentation, or recognition. [While the Location-Guided Head Pose Estimation in Fisheye Images method demonstrates how geometric properties can be leveraged for a specific task like head pose estimation, the current paper could be expanded to consider a broader range of 3D perception capabilities.]
Additionally, the paper does not provide much insight into the runtime performance of the proposed algorithm, in terms of actual processing speeds or energy consumption. While the authors claim significant computational savings, more detailed benchmarking against state-of-the-art methods would help better quantify the practical benefits of their approach.
Finally, the authors do not discuss potential failure cases or limitations of their geometry-informed candidate selection strategy. It would be valuable to understand the types of scenes or scenarios where this approach may not perform as well, and how it could be further improved or combined with other techniques to address such limitations.
Conclusion
This paper presents a novel geometry-informed distance candidate selection algorithm for adaptive lightweight omnidirectional stereo vision using fisheye images. By leveraging the geometric properties of fisheye cameras, the proposed method is able to significantly reduce the computational complexity of the stereo matching process, while maintaining high depth estimation accuracy.
The key innovation is the use of epipolar geometry to define a region of interest in the disparity space, which contains the most likely depth values. This allows the stereo vision system to focus its computational resources on the most relevant disparity candidates, leading to a more efficient and lightweight pipeline.
The results demonstrate the effectiveness of this approach, and the authors have provided a thorough evaluation on both synthetic and real-world datasets. While the paper is primarily focused on depth estimation, the underlying principles could potentially be extended to other 3D perception tasks, making it a valuable contribution to the field of efficient and adaptive computer vision systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Geometry-Informed Distance Candidate Selection for Adaptive Lightweight Omnidirectional Stereo Vision with Fisheye Images
Conner Pulling, Je Hon Tan, Yaoyu Hu, Sebastian Scherer
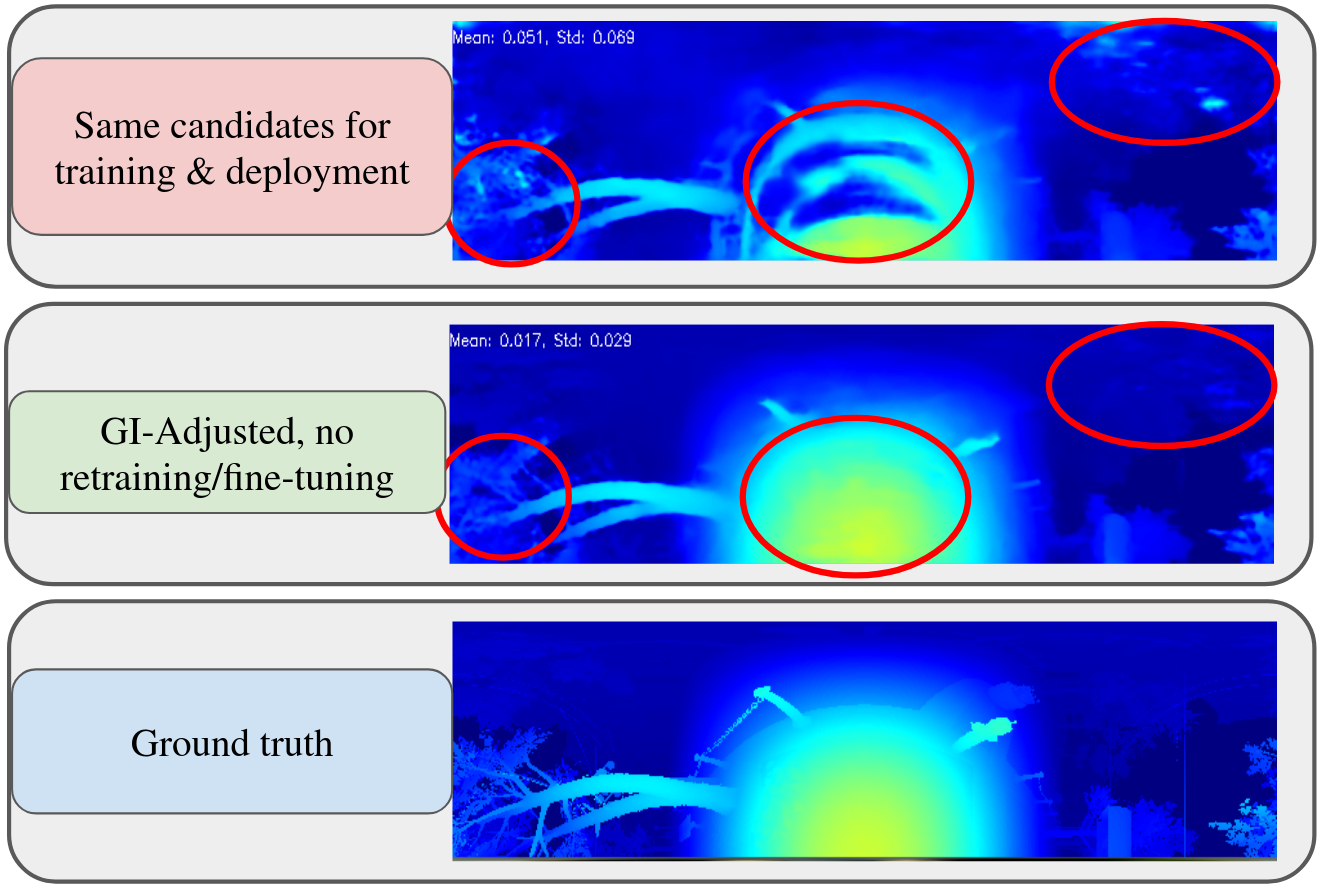
Multi-view stereo omnidirectional distance estimation usually needs to build a cost volume with many hypothetical distance candidates. The cost volume building process is often computationally heavy considering the limited resources a mobile robot has. We propose a new geometry-informed way of distance candidates selection method which enables the use of a very small number of candidates and reduces the computational cost. We demonstrate the use of the geometry-informed candidates in a set of model variants. We find that by adjusting the candidates during robot deployment, our geometry-informed distance candidates also improve a pre-trained model's accuracy if the extrinsics or the number of cameras changes. Without any re-training or fine-tuning, our models outperform models trained with evenly distributed distance candidates. Models are also released as hardware-accelerated versions with a new dedicated large-scale dataset. The project page, code, and dataset can be found at https://theairlab.org/gicandidates/ .
Read more5/10/2024

0
Incorporating dense metric depth into neural 3D representations for view synthesis and relighting
Arkadeep Narayan Chaudhury, Igor Vasiljevic, Sergey Zakharov, Vitor Guizilini, Rares Ambrus, Srinivasa Narasimhan, Christopher G. Atkeson
Synthesizing accurate geometry and photo-realistic appearance of small scenes is an active area of research with compelling use cases in gaming, virtual reality, robotic-manipulation, autonomous driving, convenient product capture, and consumer-level photography. When applying scene geometry and appearance estimation techniques to robotics, we found that the narrow cone of possible viewpoints due to the limited range of robot motion and scene clutter caused current estimation techniques to produce poor quality estimates or even fail. On the other hand, in robotic applications, dense metric depth can often be measured directly using stereo and illumination can be controlled. Depth can provide a good initial estimate of the object geometry to improve reconstruction, while multi-illumination images can facilitate relighting. In this work we demonstrate a method to incorporate dense metric depth into the training of neural 3D representations and address an artifact observed while jointly refining geometry and appearance by disambiguating between texture and geometry edges. We also discuss a multi-flash stereo camera system developed to capture the necessary data for our pipeline and show results on relighting and view synthesis with a few training views.
Read more9/6/2024

0
Geometry Fidelity for Spherical Images
Anders Christensen, Nooshin Mojab, Khushman Patel, Karan Ahuja, Zeynep Akata, Ole Winther, Mar Gonzalez-Franco, Andrea Colaco
Spherical or omni-directional images offer an immersive visual format appealing to a wide range of computer vision applications. However, geometric properties of spherical images pose a major challenge for models and metrics designed for ordinary 2D images. Here, we show that direct application of Fr'echet Inception Distance (FID) is insufficient for quantifying geometric fidelity in spherical images. We introduce two quantitative metrics accounting for geometric constraints, namely Omnidirectional FID (OmniFID) and Discontinuity Score (DS). OmniFID is an extension of FID tailored to additionally capture field-of-view requirements of the spherical format by leveraging cubemap projections. DS is a kernel-based seam alignment score of continuity across borders of 2D representations of spherical images. In experiments, OmniFID and DS quantify geometry fidelity issues that are undetected by FID.
Read more7/26/2024

0
Geometry-aware Feature Matching for Large-Scale Structure from Motion
Gonglin Chen, Jinsen Wu, Haiwei Chen, Wenbin Teng, Zhiyuan Gao, Andrew Feng, Rongjun Qin, Yajie Zhao
Establishing consistent and dense correspondences across multiple images is crucial for Structure from Motion (SfM) systems. Significant view changes, such as air-to-ground with very sparse view overlap, pose an even greater challenge to the correspondence solvers. We present a novel optimization-based approach that significantly enhances existing feature matching methods by introducing geometry cues in addition to color cues. This helps fill gaps when there is less overlap in large-scale scenarios. Our method formulates geometric verification as an optimization problem, guiding feature matching within detector-free methods and using sparse correspondences from detector-based methods as anchor points. By enforcing geometric constraints via the Sampson Distance, our approach ensures that the denser correspondences from detector-free methods are geometrically consistent and more accurate. This hybrid strategy significantly improves correspondence density and accuracy, mitigates multi-view inconsistencies, and leads to notable advancements in camera pose accuracy and point cloud density. It outperforms state-of-the-art feature matching methods on benchmark datasets and enables feature matching in challenging extreme large-scale settings.
Read more9/14/2024