GISR: Geometric Initialization and Silhouette-based Refinement for Single-View Robot Pose and Configuration Estimation

0
🔎
Sign in to get full access
Overview
- The paper presents a method called GISR (Geometric Initialization and Silhouette Refinement) for estimating the configuration and pose of a robot using visual information.
- GISR is designed for real-time execution and consists of two modules: a geometric initialization module that computes an approximate pose and configuration, and an iterative silhouette-based refinement module that refines the initial solution.
- The method is evaluated on a publicly available dataset and shown to perform competitively with existing state-of-the-art approaches while being significantly faster.
Plain English Explanation
In the world of autonomous robotics, it's crucial for robots to accurately measure their own state and understand their environment, including any other agents (like humans) they may be interacting with. This is important for planning and executing recovery protocols in case of sensor failures or external disturbances.
Visual estimation can provide this redundancy by using low-cost sensors as a standalone source of information about the robot's position and configuration, even when traditional encoder-based sensing is not available. The researchers in this paper present a method called GISR that can jointly estimate the robot's configuration (the way its parts are arranged) and its overall pose (its position and orientation) in the environment.
GISR is designed to run quickly, making it suitable for real-time applications. It has two main components: a geometric initialization module that provides an initial estimate of the robot's pose and configuration, and an iterative refinement module that fine-tunes this initial solution by analyzing the robot's silhouette (its outline as seen from the camera).
The researchers tested GISR on a publicly available dataset and found that it performs as well as or better than existing state-of-the-art methods, while being significantly faster. This means GISR could be a useful tool for robotic systems that need to quickly and accurately understand their surroundings, like industrial robots working alongside humans or legged robots navigating complex environments.
Technical Explanation
The GISR method consists of two main components: a geometric initialization module and an iterative silhouette-based refinement module.
The geometric initialization module quickly computes an approximate estimate of the robot's pose and configuration using a geometric approach. This provides a good starting point for the subsequent refinement step.
The iterative refinement module then takes this initial estimate and iteratively refines it by analyzing the robot's silhouette in the camera image. It does this by rendering a virtual silhouette based on the current pose and configuration estimate and comparing it to the actual observed silhouette. The discrepancy between the two is used to update the estimate, and this process repeats for a few iterations until convergence.
The researchers evaluated GISR on a publicly available dataset of images of a robot in various poses. They compared its performance to existing state-of-the-art methods and found that GISR achieved comparable or better results in terms of accuracy, while being significantly faster to run.
Critical Analysis
The paper provides a thorough evaluation of the GISR method, comparing it to several existing approaches on a publicly available dataset. This allows for a fair and transparent assessment of its performance.
However, the paper does not delve deeply into the limitations or potential issues with the GISR method. For example, it's unclear how well the method would generalize to different types of robots or environmental conditions beyond the specific dataset used.
Additionally, the paper does not discuss potential failure cases or edge cases where the method might struggle, such as occlusions, unusual robot configurations, or noisy sensor data. Exploring these limitations would provide a more holistic understanding of the method's strengths and weaknesses.
Further research could also investigate the scalability of GISR, such as its performance with larger or more complex robot models, or its ability to handle multiple robots or dynamic environments. Exploring these areas could lead to improvements in the method's robustness and versatility.
Overall, the GISR method presents a promising approach to visual robot state estimation, but additional analysis and testing would help solidify its practical applications and limitations.
Conclusion
The GISR method provides a fast and accurate way to jointly estimate a robot's configuration and pose using visual information. By combining a geometric initialization step with an iterative silhouette-based refinement, GISR is able to outperform existing state-of-the-art approaches while being significantly faster to run.
This capability could be valuable for a variety of autonomous robotics applications, such as industrial robots working alongside humans, or legged robots navigating complex environments. The method's real-time performance and ability to function without traditional encoder-based sensing make it a potentially useful tool for enhancing the situational awareness and safety of robotic systems.
Further research into the limitations and edge cases of GISR, as well as its scalability to more complex scenarios, could lead to even broader applications and improvements in the field of visual robot state estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔎
0
GISR: Geometric Initialization and Silhouette-based Refinement for Single-View Robot Pose and Configuration Estimation
Ivan Bili'c, Filip Mari'c, Fabio Bonsignorio, Ivan Petrovi'c
In autonomous robotics, measurement of the robot's internal state and perception of its environment, including interaction with other agents such as collaborative robots, are essential. Estimating the pose of the robot arm from a single view has the potential to replace classical eye-to-hand calibration approaches and is particularly attractive for online estimation and dynamic environments. In addition to its pose, recovering the robot configuration provides a complete spatial understanding of the observed robot that can be used to anticipate the actions of other agents in advanced robotics use cases. Furthermore, this additional redundancy enables the planning and execution of recovery protocols in case of sensor failures or external disturbances. We introduce GISR - a deep configuration and robot-to-camera pose estimation method that prioritizes execution in real-time. GISR consists of two modules: (i) a geometric initialization module that efficiently computes an approximate robot pose and configuration, and (ii) a deep iterative silhouette-based refinement module that arrives at a final solution in just a few iterations. We evaluate GISR on publicly available data and show that it outperforms existing methods of the same class in terms of both speed and accuracy, and can compete with approaches that rely on ground-truth proprioception and recover only the pose.
Read more9/18/2024
⛏️
0
New!Gaussian-Sum Filter for Range-based 3D Relative Pose Estimation in the Presence of Ambiguities
Syed S. Ahmed, Mohammed A. Shalaby, Charles C. Cossette, Jerome Le Ny, James R. Forbes
Multi-robot systems must have the ability to accurately estimate relative states between robots in order to perform collaborative tasks, possibly with no external aiding. Three-dimensional relative pose estimation using range measurements oftentimes suffers from a finite number of non-unique solutions, or ambiguities. This paper: 1) identifies and accurately estimates all possible ambiguities in 2D; 2) treats them as components of a Gaussian mixture model; and 3) presents a computationally-efficient estimator, in the form of a Gaussian-sum filter (GSF), to realize range-based relative pose estimation in an infrastructure-free, 3D, setup. This estimator is evaluated in simulation and experiment and is shown to avoid divergence to local minima induced by the ambiguous poses. Furthermore, the proposed GSF outperforms an extended Kalman filter, demonstrates similar performance to the computationally-demanding particle filter, and is shown to be consistent.
Read more9/20/2024

0
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Alexander Schperberg, Yusuke Tanaka, Saviz Mowlavi, Feng Xu, Bharathan Balaji, Dennis Hong
State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
Read more4/30/2024
0
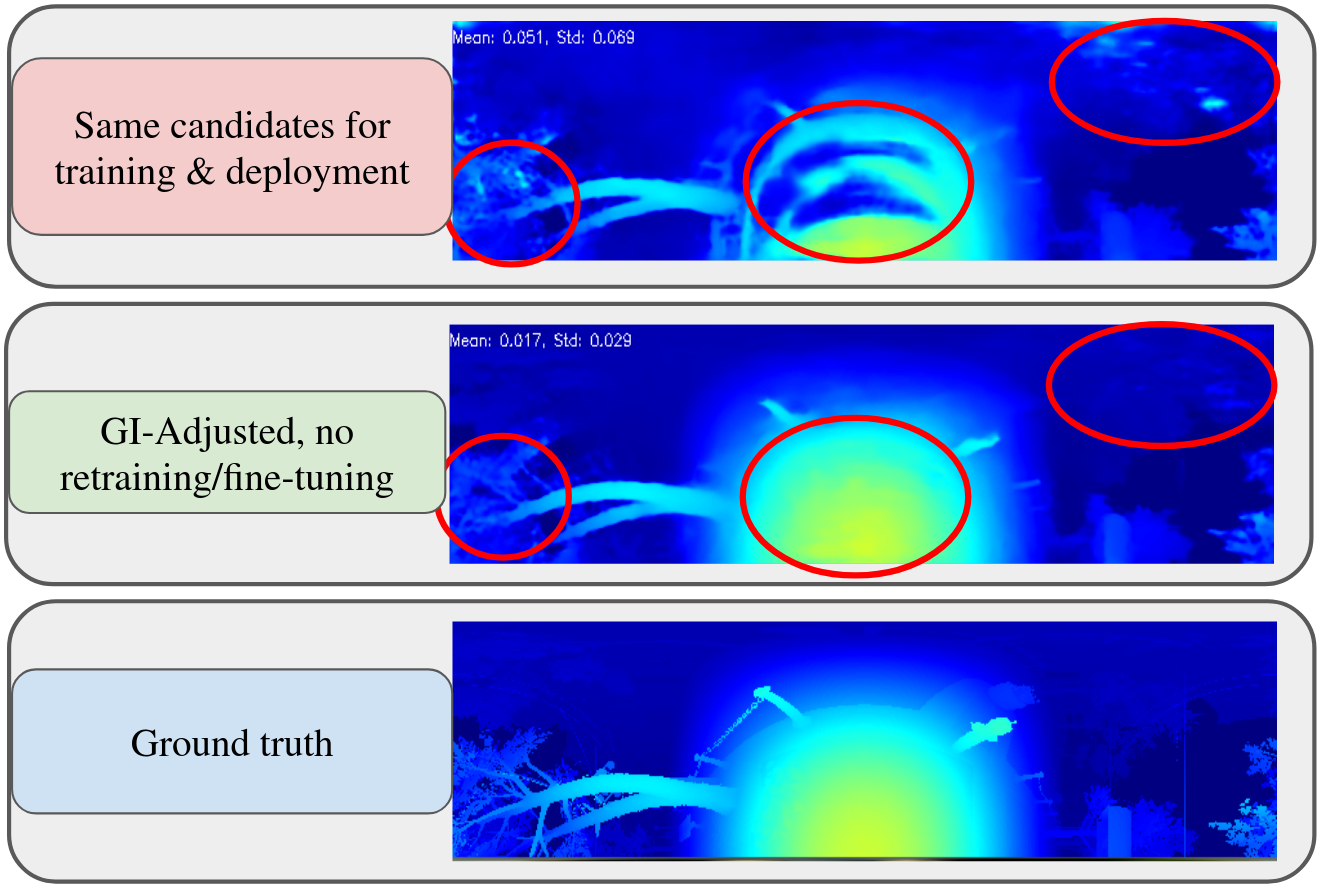
Geometry-Informed Distance Candidate Selection for Adaptive Lightweight Omnidirectional Stereo Vision with Fisheye Images
Conner Pulling, Je Hon Tan, Yaoyu Hu, Sebastian Scherer
Multi-view stereo omnidirectional distance estimation usually needs to build a cost volume with many hypothetical distance candidates. The cost volume building process is often computationally heavy considering the limited resources a mobile robot has. We propose a new geometry-informed way of distance candidates selection method which enables the use of a very small number of candidates and reduces the computational cost. We demonstrate the use of the geometry-informed candidates in a set of model variants. We find that by adjusting the candidates during robot deployment, our geometry-informed distance candidates also improve a pre-trained model's accuracy if the extrinsics or the number of cameras changes. Without any re-training or fine-tuning, our models outperform models trained with evenly distributed distance candidates. Models are also released as hardware-accelerated versions with a new dedicated large-scale dataset. The project page, code, and dataset can be found at https://theairlab.org/gicandidates/ .
Read more5/10/2024