GNN with Model-based RL for Multi-agent Systems

0
↗️
Sign in to get full access
Overview
- This paper proposes a novel approach to modeling multi-agent systems (MAS) using Graph Neural Networks (GNNs) and Model-based Reinforcement Learning (MBRL).
- The researchers aimed to deeply investigate the complex interactions within MAS scenarios, such as Billiard-Avoidance and Autonomous Driving Cars.
- The key idea is to use GNNs to predict the future states and trajectories of multiple agents, and then apply the Cross-Entropy Method (CEM) optimized Model Predictive Control to assist the ego-agent in planning actions to successfully accomplish certain MAS tasks.
Plain English Explanation
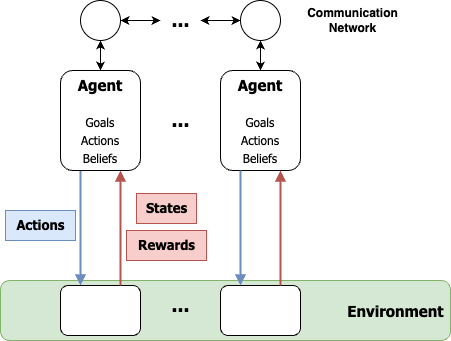
Multi-agent systems (MAS) are complex environments where multiple autonomous agents, like robots or self-driving cars, interact with each other. Understanding these interactions is crucial for developing advanced AI applications.
The researchers in this paper proposed a new way to model MAS using Graph Neural Networks (GNNs) and a technique called Model-based Reinforcement Learning (MBRL). GNNs are a type of machine learning model that can capture the relationships between different agents in the system. By using GNNs, the researchers could predict how the agents would move and interact in the future.
They then used an optimization method called the Cross-Entropy Method (CEM) to help the "ego-agent" (the main agent they were focusing on) plan the best actions to take in order to accomplish its goals, such as avoiding collisions in a Billiard-Avoidance scenario or navigating Autonomous Driving Cars.
The key innovation here is using GNNs and MBRL together to model and reason about the complex interactions between multiple agents in a way that allows a single agent to plan effective actions. This could be very useful for developing advanced AI systems that need to operate in crowded, dynamic environments.
Technical Explanation
The researchers first used a GNN model to predict the future states and trajectories of multiple agents within the MAS scenario. GNNs are well-suited for this task as they can capture the relationships between agents and how those relationships evolve over time.
They then applied the Cross-Entropy Method (CEM), an optimization algorithm, to the predictions from the GNN model. CEM helped the "ego-agent" (the main agent of interest) determine the best sequence of actions to take in order to accomplish its goals, such as avoiding collisions or navigating through traffic.
This approach of combining GNNs and MBRL allowed the researchers to address specific MAS tasks, like the Billiard-Avoidance and Autonomous Driving Cars scenarios mentioned in the paper. By predicting the future states of multiple agents and then optimizing the ego-agent's actions, the system was able to successfully complete these complex tasks.
Critical Analysis
The paper presents a promising approach for modeling and reasoning about multi-agent systems, but there are a few potential limitations and areas for further research:
-
The paper focuses on relatively simple MAS scenarios, like Billiard-Avoidance and Autonomous Driving Cars. More research is needed to understand how well the approach scales to larger, more complex MAS environments.
-
The paper does not provide a comprehensive comparison to other MBRL and multi-agent reinforcement learning techniques. It would be helpful to understand how the proposed approach performs relative to other state-of-the-art methods.
-
The paper does not discuss the computational complexity and resource requirements of the GNN-based MBRL approach. This information would be valuable for assessing the practicality of deploying such systems in real-world applications.
-
The mental modeling of the other agents' behavior and intentions is a crucial aspect of multi-agent systems that is not fully addressed in this paper. Incorporating more sophisticated social reasoning could further improve the system's performance.
Overall, the proposed approach shows promise, but more research is needed to fully understand its strengths, weaknesses, and potential applications in the field of multi-agent systems.
Conclusion
This paper presents a novel approach to modeling multi-agent systems using Graph Neural Networks (GNNs) and Model-based Reinforcement Learning (MBRL). By combining these techniques, the researchers were able to predict the future states and trajectories of multiple agents, and then use optimization methods to assist the "ego-agent" in planning effective actions to accomplish specific MAS tasks.
The key innovation is the integration of GNNs and MBRL, which allows for a more comprehensive understanding of the complex interactions between agents in dynamic, multi-agent environments. This could have significant implications for developing advanced AI applications, such as autonomous driving and robotic swarms, that need to operate effectively in crowded, real-world scenarios.
While the paper focuses on relatively simple MAS scenarios, the proposed approach shows promise and could be a valuable contribution to the field of multi-agent reinforcement learning. Further research is needed to fully understand the approach's scalability, computational requirements, and performance relative to other state-of-the-art methods.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
0
GNN with Model-based RL for Multi-agent Systems
Hanxiao Chen
Multi-agent systems (MAS) constitute a significant role in exploring machine intelligence and advanced applications. In order to deeply investigate complicated interactions within MAS scenarios, we originally propose GNN for MBRL model, which utilizes a state-spaced Graph Neural Networks with Model-based Reinforcement Learning to address specific MAS missions (e.g., Billiard-Avoidance, Autonomous Driving Cars). In detail, we firstly used GNN model to predict future states and trajectories of multiple agents, then applied the Cross-Entropy Method (CEM) optimized Model Predictive Control to assist the ego-agent planning actions and successfully accomplish certain MAS tasks.
Read more7/15/2024
🏅
0
LLM-based Multi-Agent Reinforcement Learning: Current and Future Directions
Chuanneng Sun, Songjun Huang, Dario Pompili
In recent years, Large Language Models (LLMs) have shown great abilities in various tasks, including question answering, arithmetic problem solving, and poem writing, among others. Although research on LLM-as-an-agent has shown that LLM can be applied to Reinforcement Learning (RL) and achieve decent results, the extension of LLM-based RL to Multi-Agent System (MAS) is not trivial, as many aspects, such as coordination and communication between agents, are not considered in the RL frameworks of a single agent. To inspire more research on LLM-based MARL, in this letter, we survey the existing LLM-based single-agent and multi-agent RL frameworks and provide potential research directions for future research. In particular, we focus on the cooperative tasks of multiple agents with a common goal and communication among them. We also consider human-in/on-the-loop scenarios enabled by the language component in the framework.
Read more5/21/2024
0
Multi-agent Reinforcement Learning: A Comprehensive Survey
Dom Huh, Prasant Mohapatra
Multi-agent systems (MAS) are widely prevalent and crucially important in numerous real-world applications, where multiple agents must make decisions to achieve their objectives in a shared environment. Despite their ubiquity, the development of intelligent decision-making agents in MAS poses several open challenges to their effective implementation. This survey examines these challenges, placing an emphasis on studying seminal concepts from game theory (GT) and machine learning (ML) and connecting them to recent advancements in multi-agent reinforcement learning (MARL), i.e. the research of data-driven decision-making within MAS. Therefore, the objective of this survey is to provide a comprehensive perspective along the various dimensions of MARL, shedding light on the unique opportunities that are presented in MARL applications while highlighting the inherent challenges that accompany this potential. Therefore, we hope that our work will not only contribute to the field by analyzing the current landscape of MARL but also motivate future directions with insights for deeper integration of concepts from related domains of GT and ML. With this in mind, this work delves into a detailed exploration of recent and past efforts of MARL and its related fields and describes prior solutions that were proposed and their limitations, as well as their applications.
Read more7/4/2024

0
Decentralized Cooperation in Heterogeneous Multi-Agent Reinforcement Learning via Graph Neural Network-Based Intrinsic Motivation
Jahir Sadik Monon, Deeparghya Dutta Barua, Md. Mosaddek Khan
Multi-agent Reinforcement Learning (MARL) is emerging as a key framework for various sequential decision-making and control tasks. Unlike their single-agent counterparts, multi-agent systems necessitate successful cooperation among the agents. The deployment of these systems in real-world scenarios often requires decentralized training, a diverse set of agents, and learning from infrequent environmental reward signals. These challenges become more pronounced under partial observability and the lack of prior knowledge about agent heterogeneity. While notable studies use intrinsic motivation (IM) to address reward sparsity or cooperation in decentralized settings, those dealing with heterogeneity typically assume centralized training, parameter sharing, and agent indexing. To overcome these limitations, we propose the CoHet algorithm, which utilizes a novel Graph Neural Network (GNN) based intrinsic motivation to facilitate the learning of heterogeneous agent policies in decentralized settings, under the challenges of partial observability and reward sparsity. Evaluation of CoHet in the Multi-agent Particle Environment (MPE) and Vectorized Multi-Agent Simulator (VMAS) benchmarks demonstrates superior performance compared to the state-of-the-art in a range of cooperative multi-agent scenarios. Our research is supplemented by an analysis of the impact of the agent dynamics model on the intrinsic motivation module, insights into the performance of different CoHet variants, and its robustness to an increasing number of heterogeneous agents.
Read more8/14/2024