Goal Exploration via Adaptive Skill Distribution for Goal-Conditioned Reinforcement Learning
2404.12999
0
0
Abstract
Exploration efficiency poses a significant challenge in goal-conditioned reinforcement learning (GCRL) tasks, particularly those with long horizons and sparse rewards. A primary limitation to exploration efficiency is the agent's inability to leverage environmental structural patterns. In this study, we introduce a novel framework, GEASD, designed to capture these patterns through an adaptive skill distribution during the learning process. This distribution optimizes the local entropy of achieved goals within a contextual horizon, enhancing goal-spreading behaviors and facilitating deep exploration in states containing familiar structural patterns. Our experiments reveal marked improvements in exploration efficiency using the adaptive skill distribution compared to a uniform skill distribution. Additionally, the learned skill distribution demonstrates robust generalization capabilities, achieving substantial exploration progress in unseen tasks containing similar local structures.
Create account to get full access
Overview
- This paper introduces a novel reinforcement learning (RL) approach called "Goal Exploration via Adaptive Skill Distribution" (GEAD) for goal-conditioned RL problems.
- The key idea is to adaptively adjust the skill distribution during exploration to more effectively discover diverse goals, leading to faster and more robust goal-reaching performance.
- The method is evaluated on a set of continuous control tasks and shows significant improvements over baselines in terms of goal-reaching success rate and exploration efficiency.
Plain English Explanation
In reinforcement learning (RL), the goal is for an agent to learn how to achieve certain objectives or "goals" by interacting with an environment and receiving rewards. One challenge in RL is "exploration" - how the agent can effectively explore the environment to discover new and useful skills.
The paper introduces a new approach called "Goal Exploration via Adaptive Skill Distribution" (GEAD) that aims to address this challenge. The key insight is that by adaptively adjusting the distribution of skills the agent tries during exploration, it can more efficiently discover a diverse set of goals.
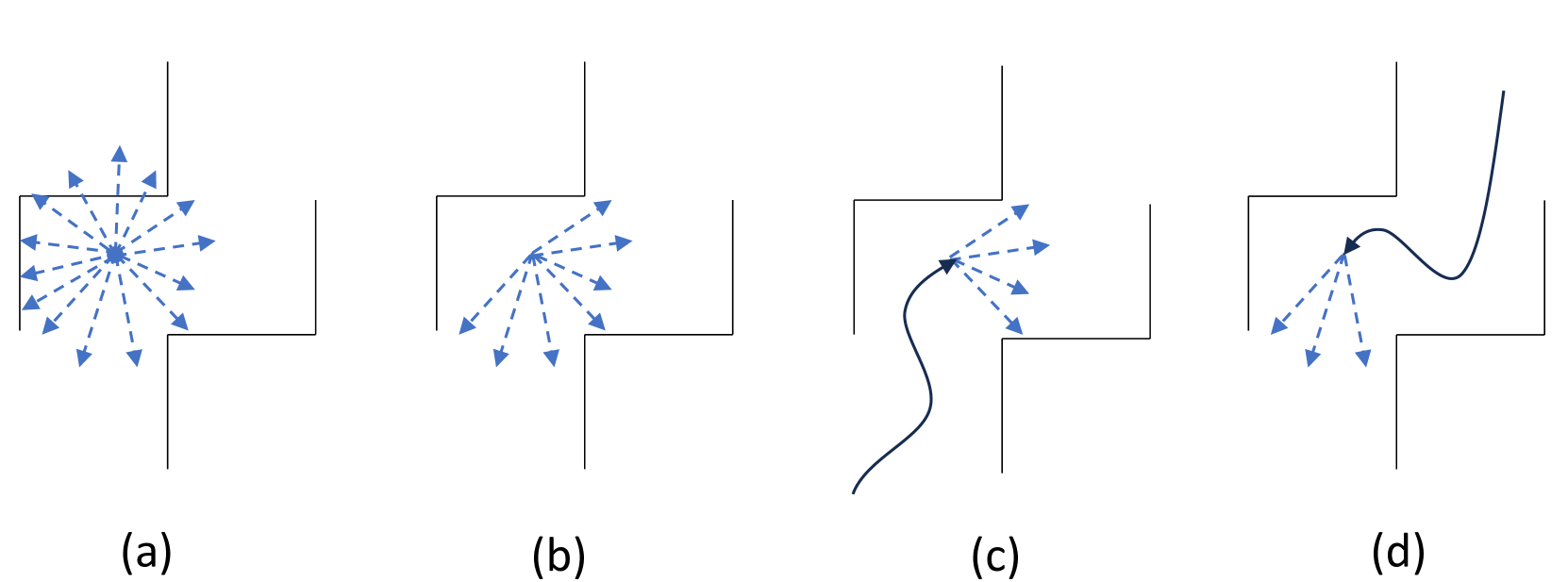
For example, imagine a robot learning to navigate a room. Rather than just randomly trying different movements, GEAD would dynamically adjust the robot's "skill distribution" - the range of movements it attempts - to focus more on underexplored areas and discover new ways to traverse the environment. This leads to faster and more robust goal-reaching performance compared to traditional exploration methods.
The researchers evaluate GEAD on several continuous control tasks, such as robotic manipulation, and show that it significantly outperforms baseline RL approaches in terms of the agent's ability to successfully reach target goals and the efficiency of its exploration.
Technical Explanation
The paper proposes a new RL algorithm called "Goal Exploration via Adaptive Skill Distribution" (GEAD) for goal-conditioned RL problems. The key innovation is an adaptive exploration strategy that adjusts the distribution of skills (actions) the agent tries during the learning process.
Specifically, GEAD maintains a skill distribution that represents the probability of selecting different actions. This distribution is adapted over time based on the agent's past exploration, with the goal of directing exploration towards underexplored regions of the state-action space.
The skill distribution is updated using a combination of two terms: 1) a "goal-reaching" term that increases the probability of skills that have led to successful goal achievement in the past, and 2) an "exploration" term that increases the probability of skills that have led to the discovery of new, diverse goals.
By adaptively balancing these two terms, GEAD aims to efficiently explore the environment to discover a wide range of goals, leading to faster and more robust goal-reaching performance compared to traditional exploration methods, such as Guided Cooperation for Hierarchical Reinforcement Learning via Model, Reinforcement Learning for Generalizable Gaussian Splatting, and Effective Reinforcement Learning Based on Structural Information Principles.
The researchers evaluate GEAD on a set of continuous control tasks, including Extremum Seeking for Action Selection to Accelerate Policy Optimization and Continuous Control with Reinforcement Learning using Distributed Distributional DRQ. The results show that GEAD outperforms baseline RL algorithms in terms of goal-reaching success rate and exploration efficiency.
Critical Analysis
The paper presents a well-designed and thorough exploration of the GEAD algorithm, with detailed experiments and insightful analysis. However, there are a few potential areas for further consideration:
-
Scalability to higher-dimensional state-action spaces: The paper focuses on relatively low-dimensional continuous control tasks. It would be valuable to evaluate GEAD's performance on more complex, higher-dimensional environments to assess its scalability.
-
Sensitivity to hyperparameters: The GEAD algorithm involves several hyperparameters, such as the weighting between goal-reaching and exploration terms. The paper provides some analysis of hyperparameter sensitivity, but more extensive investigation could help better understand the robustness of the approach.
-
Generalization to diverse task distributions: The experiments in the paper consider a fixed set of goal-reaching tasks. Exploring GEAD's ability to generalize across a wider range of task distributions could further demonstrate its effectiveness and broad applicability.
-
Computational complexity: While the paper notes that GEAD is computationally efficient, a more detailed analysis of its runtime and memory requirements compared to baseline methods would be helpful for understanding its practical implementation costs.
Overall, the GEAD algorithm presents a promising direction for improving exploration in goal-conditioned RL, and the paper provides a solid foundation for further research and development in this area.
Conclusion
This paper introduces a novel reinforcement learning approach called "Goal Exploration via Adaptive Skill Distribution" (GEAD) that aims to more effectively discover diverse goals during exploration. By dynamically adjusting the distribution of skills the agent tries, GEAD can focus exploration on underexplored regions of the state-action space, leading to faster and more robust goal-reaching performance compared to traditional exploration methods.
The researchers demonstrate the effectiveness of GEAD on a range of continuous control tasks, showing significant improvements over baseline RL algorithms. While the paper provides a strong foundation, further research is needed to explore GEAD's scalability, sensitivity, generalization, and computational complexity.
Overall, the GEAD approach represents an important step forward in addressing the exploration challenge in goal-conditioned reinforcement learning, with the potential to unlock new capabilities in areas such as robotic control, navigation, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Constrained Ensemble Exploration for Unsupervised Skill Discovery
Chenjia Bai, Rushuai Yang, Qiaosheng Zhang, Kang Xu, Yi Chen, Ting Xiao, Xuelong Li
0
0
Unsupervised Reinforcement Learning (RL) provides a promising paradigm for learning useful behaviors via reward-free per-training. Existing methods for unsupervised RL mainly conduct empowerment-driven skill discovery or entropy-based exploration. However, empowerment often leads to static skills, and pure exploration only maximizes the state coverage rather than learning useful behaviors. In this paper, we propose a novel unsupervised RL framework via an ensemble of skills, where each skill performs partition exploration based on the state prototypes. Thus, each skill can explore the clustered area locally, and the ensemble skills maximize the overall state coverage. We adopt state-distribution constraints for the skill occupancy and the desired cluster for learning distinguishable skills. Theoretical analysis is provided for the state entropy and the resulting skill distributions. Based on extensive experiments on several challenging tasks, we find our method learns well-explored ensemble skills and achieves superior performance in various downstream tasks compared to previous methods.
5/28/2024
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
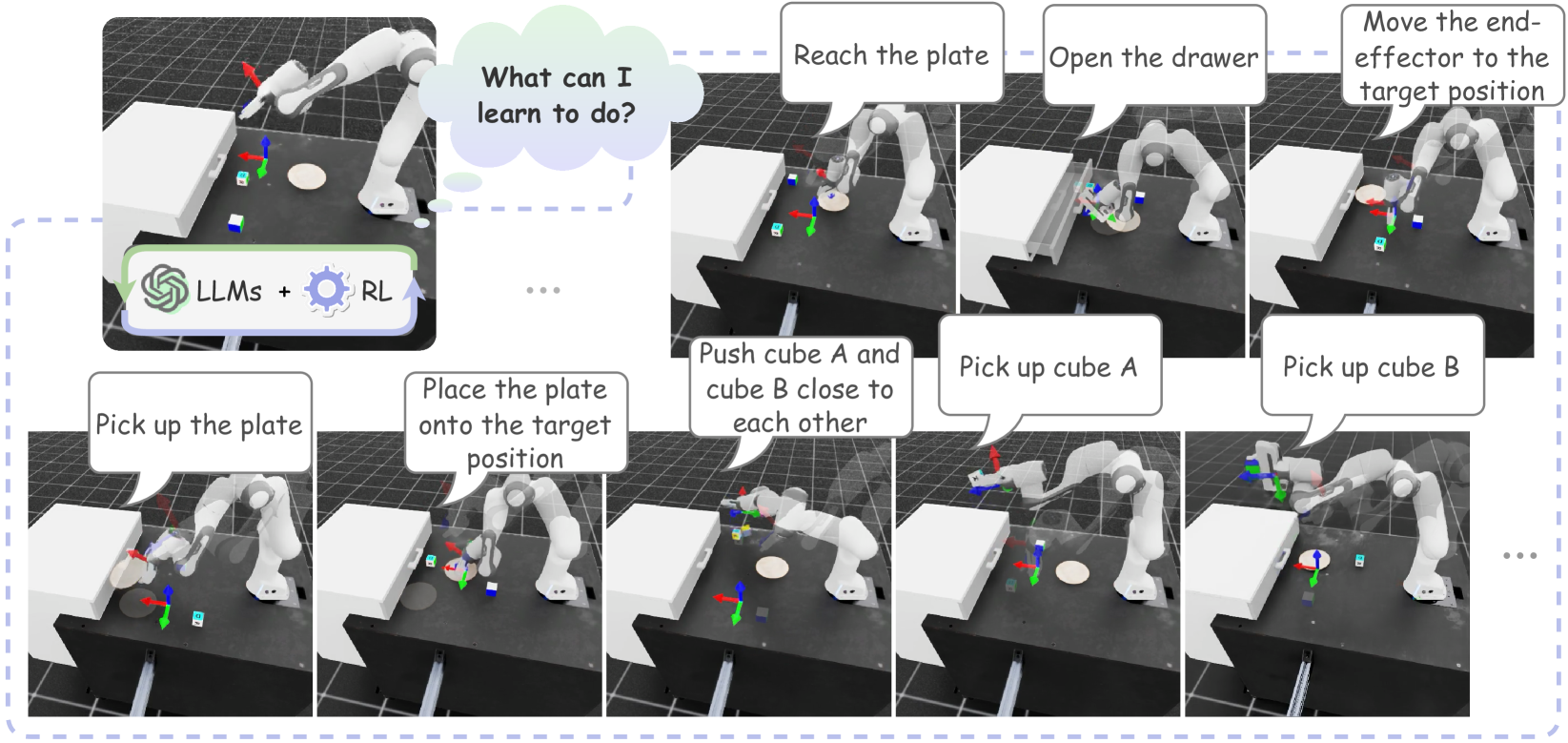
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024

Guided Cooperation in Hierarchical Reinforcement Learning via Model-based Rollout
Haoran Wang, Zeshen Tang, Leya Yang, Yaoru Sun, Fang Wang, Siyu Zhang, Yeming Chen
0
0
Goal-conditioned hierarchical reinforcement learning (HRL) presents a promising approach for enabling effective exploration in complex, long-horizon reinforcement learning (RL) tasks through temporal abstraction. Empirically, heightened inter-level communication and coordination can induce more stable and robust policy improvement in hierarchical systems. Yet, most existing goal-conditioned HRL algorithms have primarily focused on the subgoal discovery, neglecting inter-level cooperation. Here, we propose a goal-conditioned HRL framework named Guided Cooperation via Model-based Rollout (GCMR), aiming to bridge inter-layer information synchronization and cooperation by exploiting forward dynamics. Firstly, the GCMR mitigates the state-transition error within off-policy correction via model-based rollout, thereby enhancing sample efficiency. Secondly, to prevent disruption by the unseen subgoals and states, lower-level Q-function gradients are constrained using a gradient penalty with a model-inferred upper bound, leading to a more stable behavioral policy conducive to effective exploration. Thirdly, we propose a one-step rollout-based planning, using higher-level critics to guide the lower-level policy. Specifically, we estimate the value of future states of the lower-level policy using the higher-level critic function, thereby transmitting global task information downwards to avoid local pitfalls. These three critical components in GCMR are expected to facilitate inter-level cooperation significantly. Experimental results demonstrate that incorporating the proposed GCMR framework with a disentangled variant of HIGL, namely ACLG, yields more stable and robust policy improvement compared to various baselines and significantly outperforms previous state-of-the-art algorithms.
4/9/2024
🏅
GOPlan: Goal-conditioned Offline Reinforcement Learning by Planning with Learned Models
Mianchu Wang, Rui Yang, Xi Chen, Hao Sun, Meng Fang, Giovanni Montana
0
0
Offline Goal-Conditioned RL (GCRL) offers a feasible paradigm for learning general-purpose policies from diverse and multi-task offline datasets. Despite notable recent progress, the predominant offline GCRL methods, mainly model-free, face constraints in handling limited data and generalizing to unseen goals. In this work, we propose Goal-conditioned Offline Planning (GOPlan), a novel model-based framework that contains two key phases: (1) pretraining a prior policy capable of capturing multi-modal action distribution within the multi-goal dataset; (2) employing the reanalysis method with planning to generate imagined trajectories for funetuning policies. Specifically, we base the prior policy on an advantage-weighted conditioned generative adversarial network, which facilitates distinct mode separation, mitigating the pitfalls of out-of-distribution (OOD) actions. For further policy optimization, the reanalysis method generates high-quality imaginary data by planning with learned models for both intra-trajectory and inter-trajectory goals. With thorough experimental evaluations, we demonstrate that GOPlan achieves state-of-the-art performance on various offline multi-goal navigation and manipulation tasks. Moreover, our results highlight the superior ability of GOPlan to handle small data budgets and generalize to OOD goals.
5/17/2024