GRADE: Generating Realistic And Dynamic Environments for Robotics Research with Isaac Sim

0
📊
Sign in to get full access
Overview
- Synthetic data and novel rendering techniques have greatly influenced computer vision research in tasks like target tracking and human pose estimation.
- However, robotics research has lagged behind in leveraging it due to limitations of most simulation frameworks.
- This has hindered progress in (visual-)perception research, especially in dynamic environments.
- To address these challenges, the authors present GRADE (Generating Realistic and Dynamic Environments), a highly customizable simulation framework.
Plain English Explanation
GRADE is a new simulation tool that aims to help researchers working on robotic vision and perception tasks, especially in dynamic environments.
Researchers often use simulated data to train and test their computer vision models, as it can be difficult and expensive to collect real-world data, especially for complex scenarios. However, most existing simulation tools have limitations that make them unsuitable for robotics research.
For example, they may lack the ability to closely control the simulation or integrate with common robotic software like ROS. They also often struggle to realistically simulate dynamic environments with moving objects, which is crucial for tasks like visual SLAM (Simultaneous Localization and Mapping).
To address these issues, the researchers developed GRADE, which builds on NVIDIA's Isaac Sim platform. GRADE provides more flexibility and control over the simulation, allowing researchers to populate the environment, collect ground truth data, and test their approaches more effectively.
Importantly, GRADE also introduces a new way to precisely repeat experiments within the simulation, while still allowing for changes to the environment and simulation. This makes it easier to rigorously test and compare different algorithms.
Using GRADE, the researchers also collected a large synthetic dataset of annotated videos in dynamic environments, which they used to train object detection and segmentation models. This helps to bridge the "sim-to-real" gap, where models trained on simulated data often perform poorly on real-world data.
Finally, the researchers used GRADE to benchmark state-of-the-art dynamic visual SLAM algorithms, revealing their limitations in terms of tracking time and generalization capabilities. Interestingly, they also found that the top-performing deep learning models did not necessarily achieve the best SLAM performance.
Technical Explanation
The key elements of the paper are:
-
Simulation Framework: The authors present GRADE (Generating Realistic and Dynamic Environments), a highly customizable simulation framework built on NVIDIA's Isaac Sim platform. GRADE leverages Isaac's rendering capabilities and low-level APIs to allow researchers to populate and control the simulation, collect ground-truth data, and test their approaches.
-
Repeatable Experiments: GRADE introduces a new way to precisely repeat a recorded experiment within the physically enabled simulation, while still allowing for changes to the environment and simulation parameters.
-
Synthetic Dataset: The researchers collected a large synthetic dataset of richly annotated videos in dynamic environments, using a simulated flying drone. They then used this dataset to train object detection and segmentation models, helping to close the "sim-to-real" gap.
-
SLAM Benchmarking: The authors benchmarked state-of-the-art dynamic visual SLAM (Simultaneous Localization and Mapping) algorithms using GRADE. This revealed the short tracking times and low generalization capabilities of these algorithms, and surprisingly, that the top-performing deep learning models did not achieve the best SLAM performance.
Critical Analysis
The paper presents a promising approach to addressing the limitations of current simulation frameworks for robotics research, particularly in dynamic environments. By leveraging the capabilities of NVIDIA's Isaac Sim, GRADE provides researchers with more flexibility and control over the simulation, as well as the ability to precisely repeat experiments.
However, the authors acknowledge that there are still some limitations to GRADE, such as the need for further improvements in photorealism and the simulation of complex interactions between objects. Additionally, the benchmarking of dynamic SLAM algorithms revealed their shortcomings, suggesting that more research is needed to improve the performance of these algorithms in real-world, dynamic scenarios.
It would also be interesting to see how GRADE compares to other simulation frameworks, both in terms of its capabilities and the quality of the synthetic data it generates. Further research could explore the potential of GRADE in other areas of robotics, such as reinforcement learning or manipulation tasks.
Conclusion
The GRADE simulation framework represents a significant step forward in addressing the limitations of existing tools for robotics research, particularly in dynamic environments. By providing researchers with more control and flexibility, as well as a large synthetic dataset, GRADE has the potential to accelerate progress in areas like visual perception and SLAM, which are crucial for the development of autonomous robotic systems. The benchmarking results also highlight the need for continued research to improve the performance of dynamic SLAM algorithms, which will be an important focus for future work in this field.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
GRADE: Generating Realistic And Dynamic Environments for Robotics Research with Isaac Sim
Elia Bonetto, Chenghao Xu, Aamir Ahmad
Synthetic data and novel rendering techniques have greatly influenced computer vision research in tasks like target tracking and human pose estimation. However, robotics research has lagged behind in leveraging it due to the limitations of most simulation frameworks, including the lack of low-level software control and flexibility, Robot Operating System integration, realistic physics, or photorealism. This hindered progress in (visual-)perception research, e.g. in autonomous robotics, especially in dynamic environments. Visual Simultaneous Localization and Mapping (V-SLAM), for instance, has been mostly developed passively, in static environments, and evaluated on few pre-recorded dynamic datasets due to the difficulties of realistically simulating dynamic worlds and the huge sim-to-real gap. To address these challenges, we present GRADE (Generating Realistic and Dynamic Environments), a highly customizable framework built upon NVIDIA Isaac Sim. We leverage Isaac's rendering capabilities and low-level APIs to populate and control the simulation, collect ground-truth data, and test online and offline approaches. Importantly, we introduce a new way to precisely repeat a recorded experiment within a physically enabled simulation while allowing environmental and simulation changes. Next, we collect a synthetic dataset of richly annotated videos in dynamic environments with a flying drone. Using that, we train detection and segmentation models for humans, closing the syn-to-real gap. Finally, we benchmark state-of-the-art dynamic V-SLAM algorithms, revealing their short tracking times and low generalization capabilities. We also show for the first time that the top-performing deep learning models do not achieve the best SLAM performance. Code and data are provided as open-source at https://grade.is.tue.mpg.de.
Read more8/23/2024
0
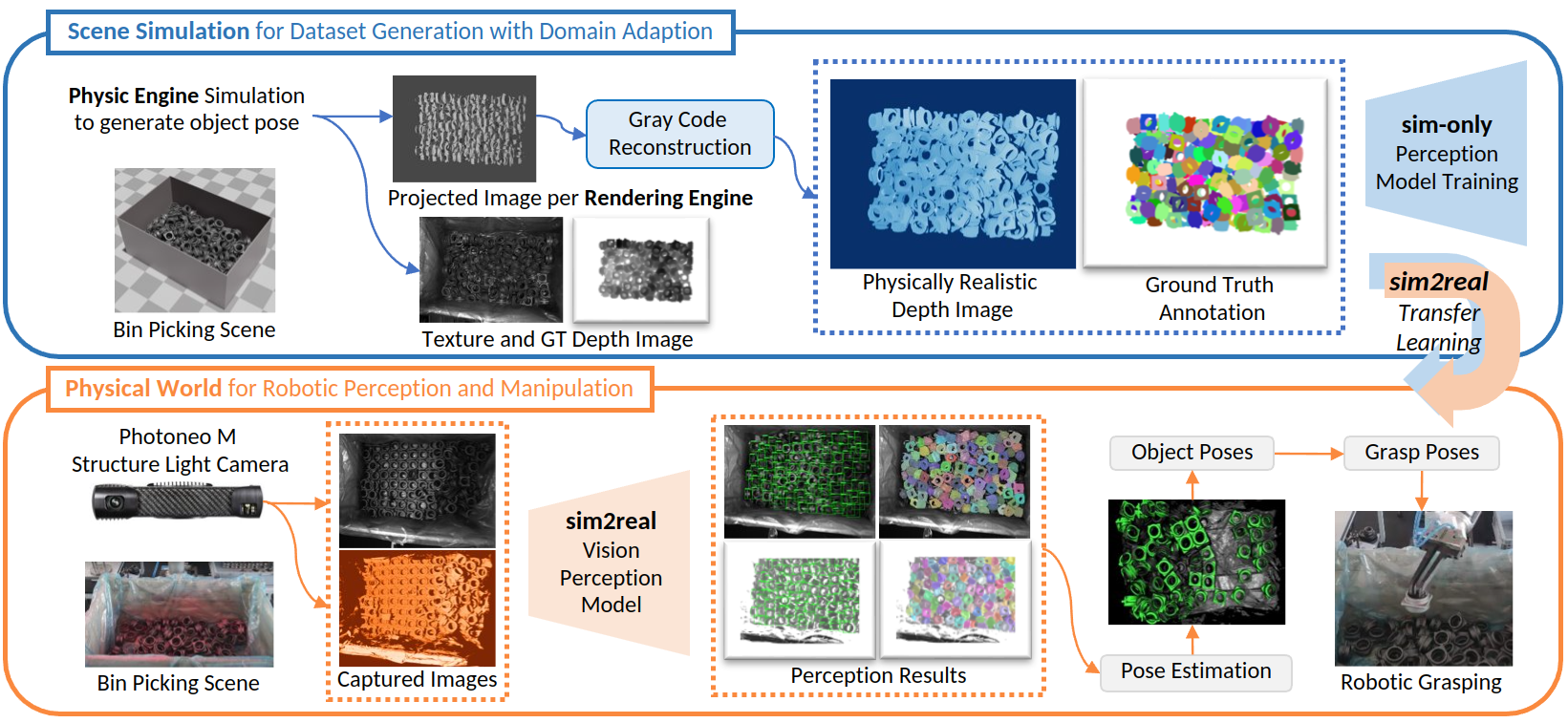
Close the Sim2real Gap via Physically-based Structured Light Synthetic Data Simulation
Kaixin Bai, Lei Zhang, Zhaopeng Chen, Fang Wan, Jianwei Zhang
Despite the substantial progress in deep learning, its adoption in industrial robotics projects remains limited, primarily due to challenges in data acquisition and labeling. Previous sim2real approaches using domain randomization require extensive scene and model optimization. To address these issues, we introduce an innovative physically-based structured light simulation system, generating both RGB and physically realistic depth images, surpassing previous dataset generation tools. We create an RGBD dataset tailored for robotic industrial grasping scenarios and evaluate it across various tasks, including object detection, instance segmentation, and embedding sim2real visual perception in industrial robotic grasping. By reducing the sim2real gap and enhancing deep learning training, we facilitate the application of deep learning models in industrial settings. Project details are available at https://baikaixinpublic.github.io/structured light 3D synthesizer/.
Read more7/18/2024
0
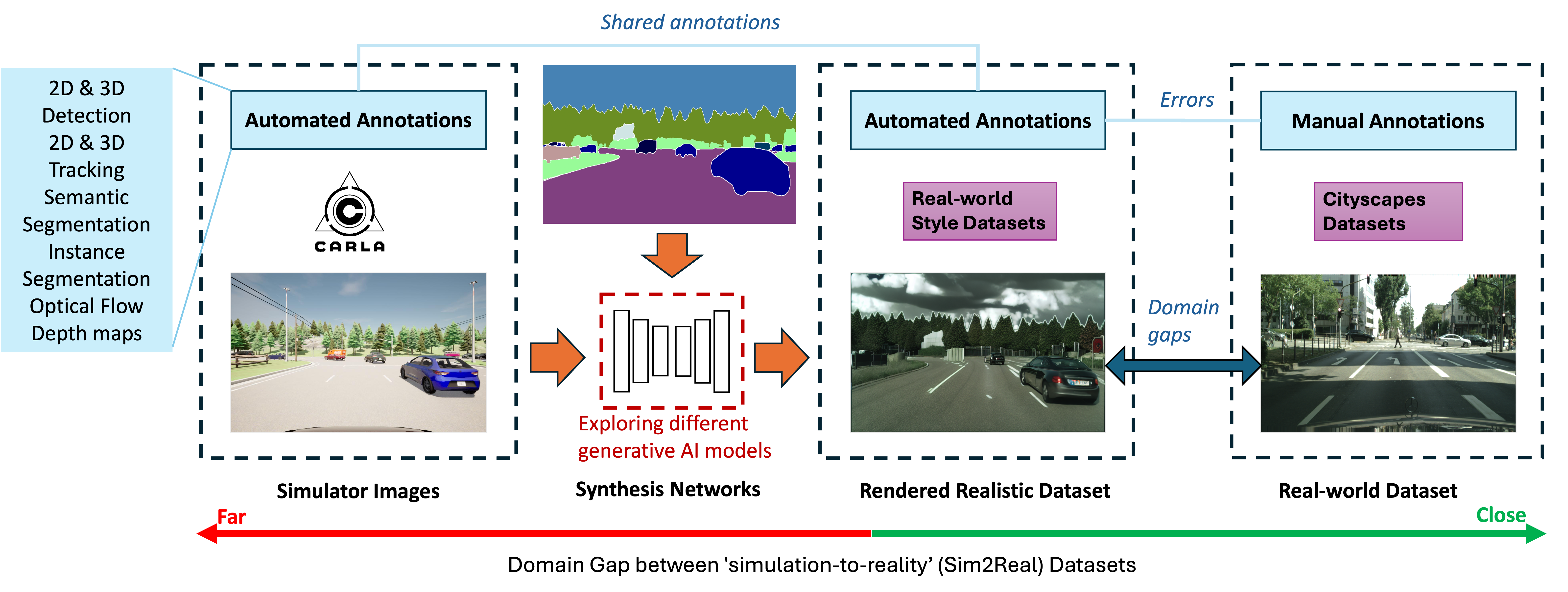
Exploring Generative AI for Sim2Real in Driving Data Synthesis
Haonan Zhao, Yiting Wang, Thomas Bashford-Rogers, Valentina Donzella, Kurt Debattista
Datasets are essential for training and testing vehicle perception algorithms. However, the collection and annotation of real-world images is time-consuming and expensive. Driving simulators offer a solution by automatically generating various driving scenarios with corresponding annotations, but the simulation-to-reality (Sim2Real) domain gap remains a challenge. While most of the Generative Artificial Intelligence (AI) follows the de facto Generative Adversarial Nets (GANs)-based methods, the recent emerging diffusion probabilistic models have not been fully explored in mitigating Sim2Real challenges for driving data synthesis. To explore the performance, this paper applied three different generative AI methods to leverage semantic label maps from a driving simulator as a bridge for the creation of realistic datasets. A comparative analysis of these methods is presented from the perspective of image quality and perception. New synthetic datasets, which include driving images and auto-generated high-quality annotations, are produced with low costs and high scene variability. The experimental results show that although GAN-based methods are adept at generating high-quality images when provided with manually annotated labels, ControlNet produces synthetic datasets with fewer artefacts and more structural fidelity when using simulator-generated labels. This suggests that the diffusion-based approach may provide improved stability and an alternative method for addressing Sim2Real challenges.
Read more4/16/2024
0
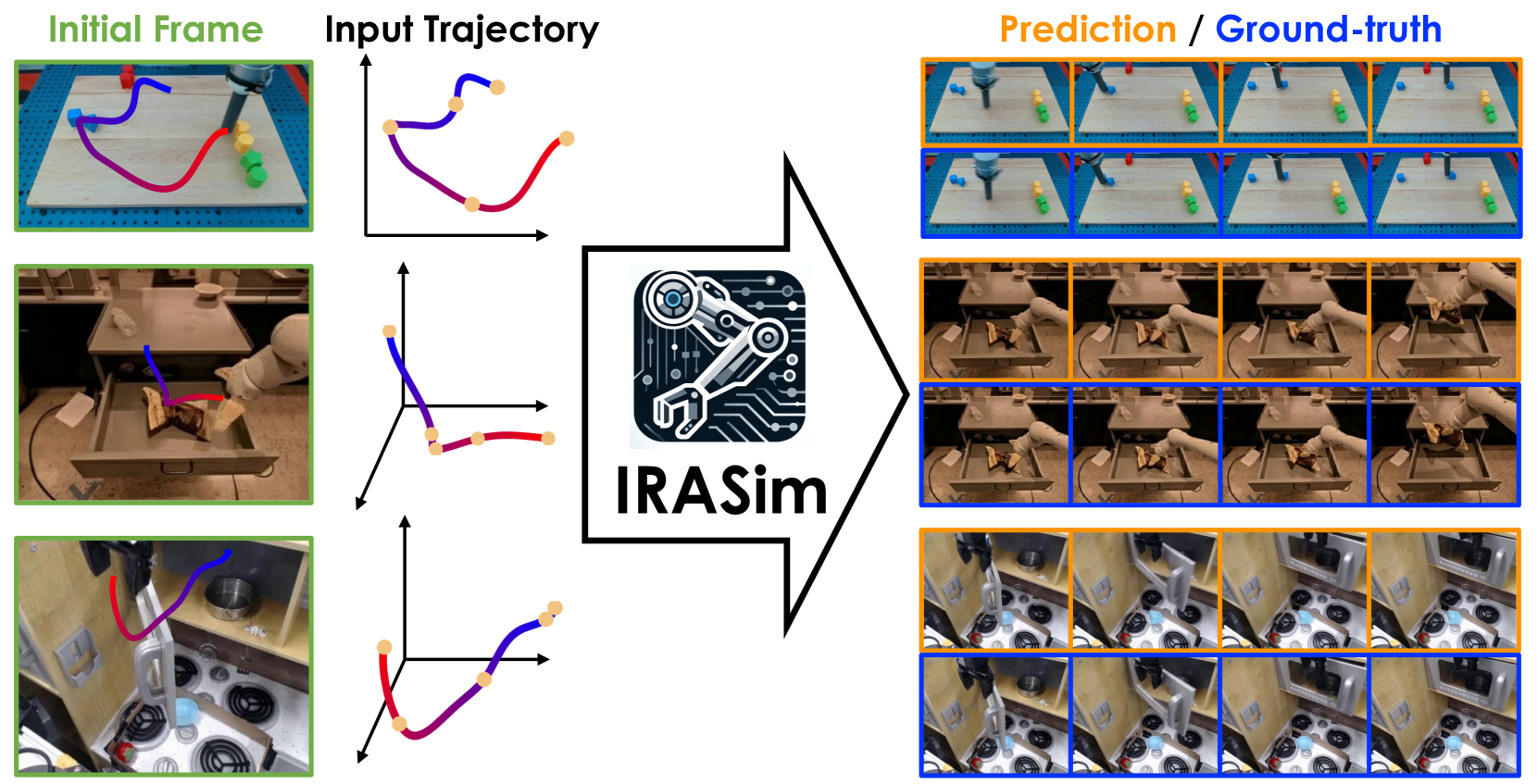
IRASim: Learning Interactive Real-Robot Action Simulators
Fangqi Zhu, Hongtao Wu, Song Guo, Yuxiao Liu, Chilam Cheang, Tao Kong
Scalable robot learning in the real world is limited by the cost and safety issues of real robots. In addition, rolling out robot trajectories in the real world can be time-consuming and labor-intensive. In this paper, we propose to learn an interactive real-robot action simulator as an alternative. We introduce a novel method, IRASim, which leverages the power of generative models to generate extremely realistic videos of a robot arm that executes a given action trajectory, starting from an initial given frame. To validate the effectiveness of our method, we create a new benchmark, IRASim Benchmark, based on three real-robot datasets and perform extensive experiments on the benchmark. Results show that IRASim outperforms all the baseline methods and is more preferable in human evaluations. We hope that IRASim can serve as an effective and scalable approach to enhance robot learning in the real world. To promote research for generative real-robot action simulators, we open-source code, benchmark, and checkpoints at https: //gen-irasim.github.io.
Read more6/21/2024