Close the Sim2real Gap via Physically-based Structured Light Synthetic Data Simulation

0
Sign in to get full access
Overview
- This paper proposes a method for generating realistic synthetic data for structured light 3D scanning applications, with the goal of bridging the "sim2real" gap between simulated and real-world data.
- The authors develop a physically-based simulator that can generate synthetic RGB-D data that closely matches real sensor data, accounting for factors like material properties, lighting, and sensor noise.
- The synthetic data is used to train deep learning models for 3D reconstruction, demonstrating improved performance compared to models trained on real data alone or using other synthetic data generation approaches.
Plain English Explanation
The researchers in this study wanted to find a way to create realistic computer-generated 3D scanning data that is as close as possible to actual sensor data collected in the real world. This is important because machine learning models often perform better when they are trained on data that closely matches the real-world conditions they will encounter.
To do this, the researchers developed a simulator that can generate synthetic RGB-D (RGB color plus depth) data. This simulator takes into account factors like the materials of the objects being scanned, the lighting conditions, and the noise and other imperfections of the 3D scanning sensor itself. By carefully modeling all of these physical characteristics, the researchers were able to produce synthetic data that looks and behaves very similarly to real data collected from a 3D scanner.
The researchers then used this synthetic data to train deep learning models for the task of 3D reconstruction - reconstructing the 3D shape of an object from the 2D camera images. They found that models trained on the physically-based synthetic data performed better than models trained on either real data alone or other types of synthetic data that didn't model the physics as carefully.
This work helps bridge the sim2real gap - the challenge of getting machine learning models trained in simulation to work well in the real world. By generating high-quality synthetic data that closely matches real-world conditions, the researchers were able to improve the performance of 3D reconstruction models, with potential applications in areas like industrial part classification, RGB-D sensing, and autonomous driving.
Technical Explanation
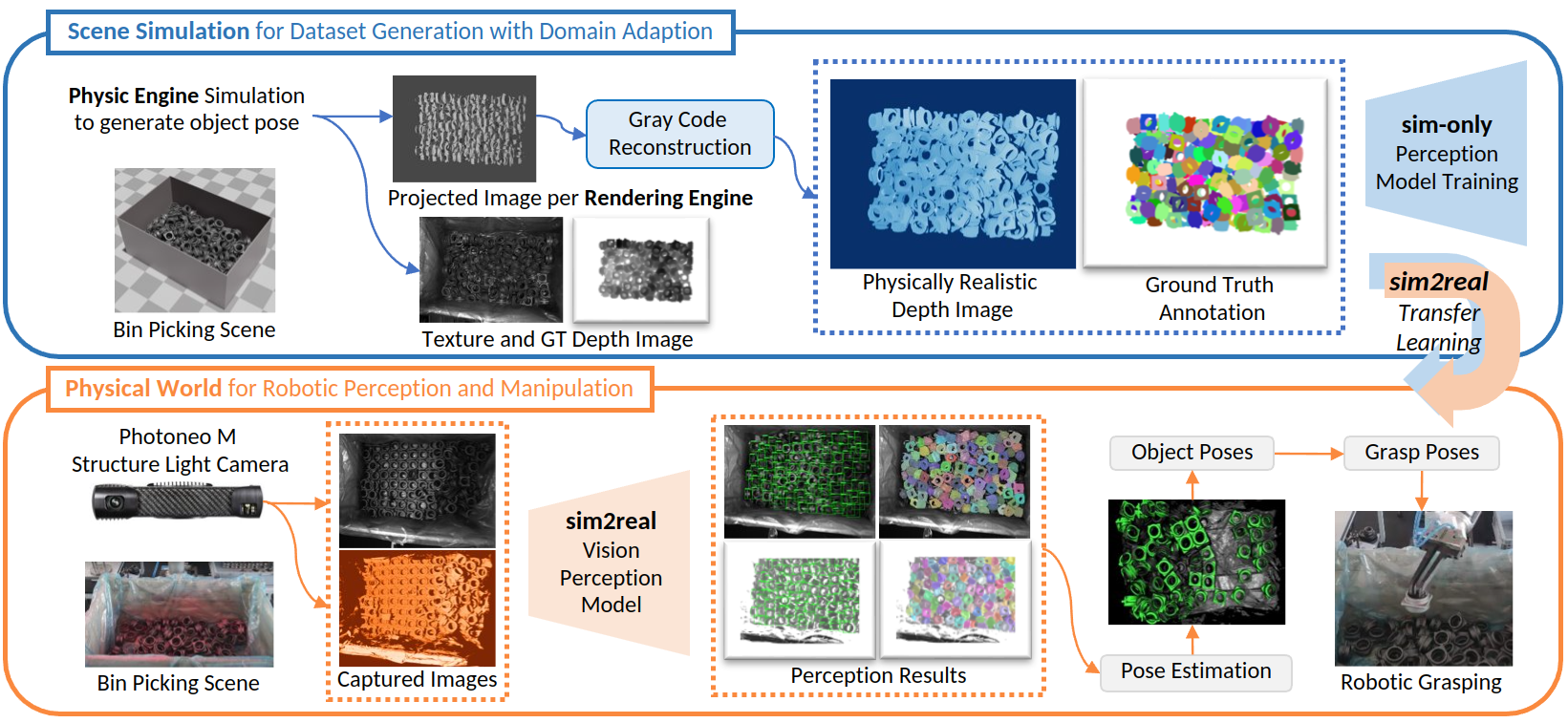
The key technical contribution of this paper is the development of a physically-based simulator for generating structured light 3D scanning synthetic data. The simulator models the full 3D scanning pipeline, including the projector, camera, and object interactions, to produce realistic RGB-D data.
Some of the key physical properties modeled include:
- Material reflectance properties, using a physically-based rendering approach
- Accurate simulation of the structured light projection, accounting for factors like projector optics and lens distortion
- Realistic simulation of sensor noise and imperfections, such as camera pixel response and sensor quantization
The researchers use this simulator to generate large-scale datasets of synthetic RGB-D data, and then leverage this data to train deep learning models for 3D reconstruction tasks. They demonstrate state-of-the-art performance on benchmark 3D reconstruction datasets, showing that models trained on the physically-based synthetic data outperform those trained on real data alone or other types of synthetic data.
Critical Analysis
One limitation of this work is that the simulator is focused on structured light 3D scanning, and may not generalize as well to other 3D sensing modalities like time-of-flight or stereo cameras. The authors acknowledge this and suggest extending the simulator to support additional sensor types as future work.
Additionally, while the authors demonstrate impressive results on benchmark datasets, it's unclear how well the models trained on synthetic data would perform in real-world, industrial deployment scenarios. Further evaluation on more diverse, real-world datasets would help validate the practical applicability of this approach.
That said, the core idea of leveraging physically-based simulation to bridge the sim2real gap is a promising one, and this work represents an important step forward. By carefully modeling the underlying physics, the researchers were able to generate synthetic data that was remarkably effective for training 3D reconstruction models. This points to the potential of simulation-based data generation as a way to reduce the reliance on costly and time-consuming real-world data collection.
Conclusion
This paper presents a novel approach for generating physically-based structured light 3D scanning synthetic data, with the goal of bridging the sim2real gap and improving the performance of deep learning models for 3D reconstruction tasks. By carefully modeling the underlying physics of the 3D scanning process, the researchers were able to produce synthetic data that closely matched real-world sensor data, leading to significant performance gains when used to train deep learning models.
This work highlights the potential of simulation-based data generation techniques to overcome the challenges of real-world data collection, with applications in areas like industrial part classification, RGB-D sensing, and autonomous driving. As the field of machine learning continues to advance, innovative approaches like this that can leverage the power of simulation will become increasingly important for pushing the boundaries of what is possible.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Close the Sim2real Gap via Physically-based Structured Light Synthetic Data Simulation
Kaixin Bai, Lei Zhang, Zhaopeng Chen, Fang Wan, Jianwei Zhang
Despite the substantial progress in deep learning, its adoption in industrial robotics projects remains limited, primarily due to challenges in data acquisition and labeling. Previous sim2real approaches using domain randomization require extensive scene and model optimization. To address these issues, we introduce an innovative physically-based structured light simulation system, generating both RGB and physically realistic depth images, surpassing previous dataset generation tools. We create an RGBD dataset tailored for robotic industrial grasping scenarios and evaluate it across various tasks, including object detection, instance segmentation, and embedding sim2real visual perception in industrial robotic grasping. By reducing the sim2real gap and enhancing deep learning training, we facilitate the application of deep learning models in industrial settings. Project details are available at https://baikaixinpublic.github.io/structured light 3D synthesizer/.
Read more7/18/2024
📊
0
Synthetic Data Generation for Bridging Sim2Real Gap in a Production Environment
Parth Rawal, Mrunal Sompura, Wolfgang Hintze
Synthetic data is being used lately for training deep neural networks in computer vision applications such as object detection, object segmentation and 6D object pose estimation. Domain randomization hereby plays an important role in reducing the simulation to reality gap. However, this generalization might not be effective in specialized domains like a production environment involving complex assemblies. Either the individual parts, trained with synthetic images, are integrated in much larger assemblies making them indistinguishable from their counterparts and result in false positives or are partially occluded just enough to give rise to false negatives. Domain knowledge is vital in these cases and if conceived effectively while generating synthetic data, can show a considerable improvement in bridging the simulation to reality gap. This paper focuses on synthetic data generation procedures for parts and assemblies used in a production environment. The basic procedures for synthetic data generation and their various combinations are evaluated and compared on images captured in a production environment, where results show up to 15% improvement using combinations of basic procedures. Reducing the simulation to reality gap in this way can aid to utilize the true potential of robot assisted production using artificial intelligence.
Read more5/13/2024

0
RaSim: A Range-aware High-fidelity RGB-D Data Simulation Pipeline for Real-world Applications
Xingyu Liu, Chenyangguang Zhang, Gu Wang, Ruida Zhang, Xiangyang Ji
In robotic vision, a de-facto paradigm is to learn in simulated environments and then transfer to real-world applications, which poses an essential challenge in bridging the sim-to-real domain gap. While mainstream works tackle this problem in the RGB domain, we focus on depth data synthesis and develop a range-aware RGB-D data simulation pipeline (RaSim). In particular, high-fidelity depth data is generated by imitating the imaging principle of real-world sensors. A range-aware rendering strategy is further introduced to enrich data diversity. Extensive experiments show that models trained with RaSim can be directly applied to real-world scenarios without any finetuning and excel at downstream RGB-D perception tasks.
Read more4/8/2024
0
Domain-Transferred Synthetic Data Generation for Improving Monocular Depth Estimation
Seungyeop Lee, Knut Peterson, Solmaz Arezoomandan, Bill Cai, Peihan Li, Lifeng Zhou, David Han
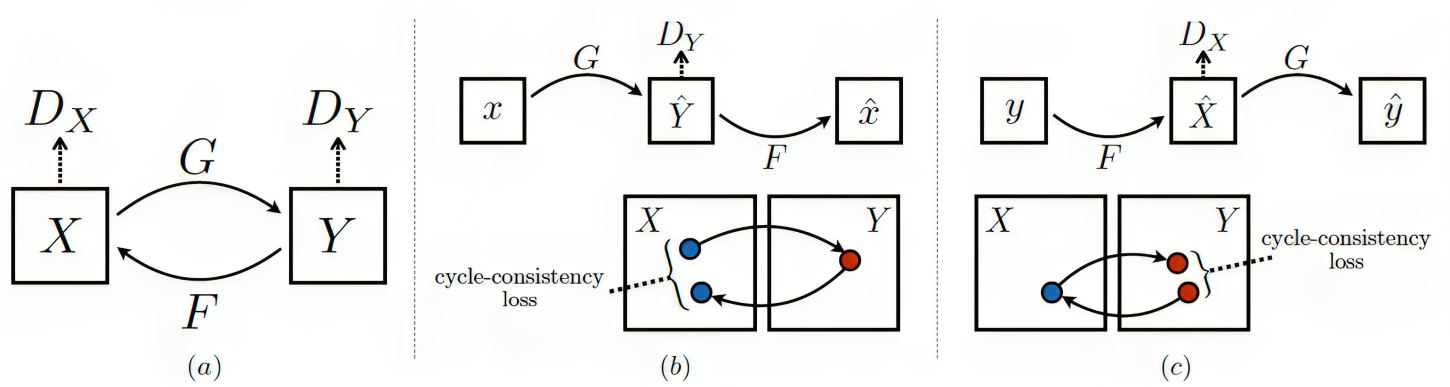
A major obstacle to the development of effective monocular depth estimation algorithms is the difficulty in obtaining high-quality depth data that corresponds to collected RGB images. Collecting this data is time-consuming and costly, and even data collected by modern sensors has limited range or resolution, and is subject to inconsistencies and noise. To combat this, we propose a method of data generation in simulation using 3D synthetic environments and CycleGAN domain transfer. We compare this method of data generation to the popular NYUDepth V2 dataset by training a depth estimation model based on the DenseDepth structure using different training sets of real and simulated data. We evaluate the performance of the models on newly collected images and LiDAR depth data from a Husky robot to verify the generalizability of the approach and show that GAN-transformed data can serve as an effective alternative to real-world data, particularly in depth estimation.
Read more5/3/2024