Graph Inspection for Robotic Motion Planning: Do Arithmetic Circuits Help?

0
Sign in to get full access
Overview
- This paper investigates the use of arithmetic circuits in robotic motion planning tasks.
- The researchers explore whether incorporating arithmetic circuits can improve the efficiency and performance of graph inspection algorithms used in motion planning.
- The paper includes theoretical contributions, experimental evaluations, and a critical analysis of the potential benefits and limitations of this approach.
Plain English Explanation
The paper looks at how robots can plan their movements through complex environments. When a robot needs to navigate to a specific location, it has to analyze the possible paths it could take, which can be represented as a graph. The researchers wondered if using a special type of mathematical model called an "arithmetic circuit" could help the robot analyze these graphs more efficiently and find better paths.
Arithmetic circuits are a way of representing mathematical operations in a compact and flexible format. The researchers theorized that by incorporating arithmetic circuits into the graph inspection algorithms used for robot motion planning, they might be able to improve the speed and accuracy of the planning process.
To test this idea, the researchers conducted a series of experiments comparing motion planning algorithms that use arithmetic circuits to those that don't. They looked at factors like how quickly the algorithms could find a suitable path and how optimal the resulting paths were.
The results showed that in some cases, the arithmetic circuit-based approaches did provide benefits in terms of efficiency and path quality. However, the researchers also identified some limitations and areas for further exploration.
Technical Explanation
The paper makes several theoretical contributions to the use of arithmetic circuits in robotic motion planning. The researchers developed new formulations and algorithms for incorporating arithmetic circuits into graph inspection tasks, with the goal of improving the efficiency and performance of these key planning components.
Through a series of experiments, the authors evaluated the impact of using arithmetic circuits on various motion planning metrics, such as path length, planning time, and success rate. The experiments involved comparing the arithmetic circuit-based approaches to traditional graph inspection methods across a range of simulated environments and robot configurations.
The results indicate that in certain scenarios, the arithmetic circuit-based methods can outperform the traditional approaches, particularly in terms of planning time and path optimality. However, the researchers also note that the benefits are not universal and depend on factors like the complexity of the environment and the specific robot capabilities.
Critical Analysis
The paper provides a thoughtful exploration of the potential benefits of using arithmetic circuits in robotic motion planning, but also acknowledges some of the limitations and challenges of this approach.
One key caveat mentioned is that the performance gains enabled by arithmetic circuits may be heavily dependent on the specific problem instance and environment. The researchers suggest that further research is needed to better understand the conditions under which arithmetic circuits are most beneficial.
Additionally, the paper does not address potential issues around the computational overhead and memory requirements of implementing arithmetic circuits within motion planning algorithms. These factors could be important considerations when deploying such techniques in real-world robotic systems with limited resources.
Overall, the research presented in this paper is a valuable contribution to the field of robotic motion planning, but additional work is likely needed to fully understand the strengths, weaknesses, and appropriate applications of arithmetic circuits in this domain.
Conclusion
This paper investigates the use of arithmetic circuits to enhance the efficiency and performance of graph inspection algorithms for robotic motion planning. The theoretical and experimental results suggest that in certain scenarios, incorporating arithmetic circuits can provide benefits in terms of planning time and path optimality.
However, the authors also identify limitations and areas for further research, such as understanding the conditions under which arithmetic circuits are most advantageous and addressing potential implementation challenges. Overall, the work presented in this paper represents an important step forward in exploring novel approaches to improving robotic motion planning capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Graph Inspection for Robotic Motion Planning: Do Arithmetic Circuits Help?
Matthias Bentert, Daniel Coimbra Salomao, Alex Crane, Yosuke Mizutani, Felix Reidl, Blair D. Sullivan
We investigate whether algorithms based on arithmetic circuits are a viable alternative to existing solvers for Graph Inspection, a problem with direct application in robotic motion planning. Specifically, we seek to address the high memory usage of existing solvers. Aided by novel theoretical results enabling fast solution recovery, we implement a circuit-based solver for Graph Inspection which uses only polynomial space and test it on several realistic robotic motion planning datasets. In particular, we provide a comprehensive experimental evaluation of a suite of engineered algorithms for three key subroutines. While this evaluation demonstrates that circuit-based methods are not yet practically competitive for our robotics application, it also provides insights which may guide future efforts to bring circuit-based algorithms from theory to practice.
Read more9/14/2024
0
Leveraging Fixed-Parameter Tractability for Robot Inspection Planning
Yosuke Mizutani, Daniel Coimbra Salomao, Alex Crane, Matthias Bentert, P{aa}l Gr{o}n{aa}s Drange, Felix Reidl, Alan Kuntz, Blair D. Sullivan
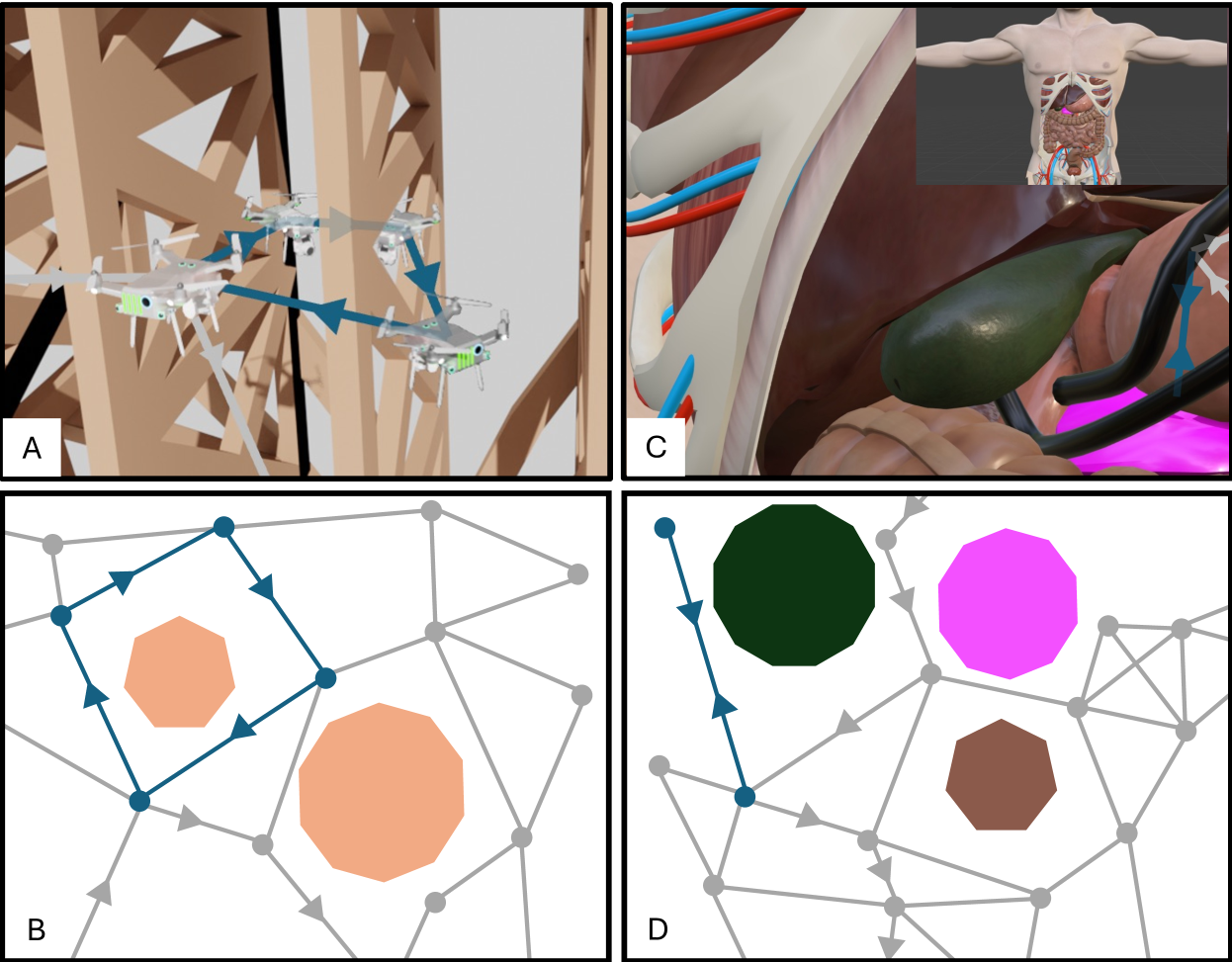
Autonomous robotic inspection, where a robot moves through its environment and inspects points of interest, has applications in industrial settings, structural health monitoring, and medicine. Planning the paths for a robot to safely and efficiently perform such an inspection is an extremely difficult algorithmic challenge. In this work we consider an abstraction of the inspection planning problem which we term Graph Inspection. We give two exact algorithms for this problem, using dynamic programming and integer linear programming. We analyze the performance of these methods, and present multiple approaches to achieve scalability. We demonstrate significant improvement both in path weight and inspection coverage over a state-of-the-art approach on two robotics tasks in simulation, a bridge inspection task by a UAV and a surgical inspection task using a medical robot.
Read more9/19/2024

0
A Comprehensive Study of Quantum Arithmetic Circuits
Siyi Wang, Xiufan Li, Wei Jie Bryan Lee, Suman Deb, Eugene Lim, Anupam Chattopadhyay
In recent decades, the field of quantum computing has experienced remarkable progress. This progress is marked by the superior performance of many quantum algorithms compared to their classical counterparts, with Shor's algorithm serving as a prominent illustration. Quantum arithmetic circuits, which are the fundamental building blocks in numerous quantum algorithms, have attracted much attention. Despite extensive exploration of various designs in the existing literature, researchers remain keen on developing novel designs and improving existing ones. In this review article, we aim to provide a systematically organized and easily comprehensible overview of the current state-of-the-art in quantum arithmetic circuits. Specifically, this study covers fundamental operations such as addition, subtraction, multiplication, division and modular exponentiation. We delve into the detailed quantum implementations of these prominent designs and evaluate their efficiency considering various objectives. We also discuss potential applications of presented arithmetic circuits and suggest future research directions.
Read more6/7/2024

0
Graph Attention-Based Symmetry Constraint Extraction for Analog Circuits
Qi Xu, Lijie Wang, Jing Wang, Lin Cheng, Song Chen, Yi Kang
In recent years, analog circuits have received extensive attention and are widely used in many emerging applications. The high demand for analog circuits necessitates shorter circuit design cycles. To achieve the desired performance and specifications, various geometrical symmetry constraints must be carefully considered during the analog layout process. However, the manual labeling of these constraints by experienced analog engineers is a laborious and time-consuming process. To handle the costly runtime issue, we propose a graph-based learning framework to automatically extract symmetric constraints in analog circuit layout. The proposed framework leverages the connection characteristics of circuits and the devices' information to learn the general rules of symmetric constraints, which effectively facilitates the extraction of device-level constraints on circuit netlists. The experimental results demonstrate that compared to state-of-the-art symmetric constraint detection approaches, our framework achieves higher accuracy and F1-score.
Read more5/17/2024