Leveraging Fixed-Parameter Tractability for Robot Inspection Planning

0
Sign in to get full access
Overview
- This paper explores how to efficiently plan robot inspection tasks by leveraging concepts from fixed-parameter tractability in computer science.
- The researchers develop an algorithmic approach to robot inspection planning that can handle complex real-world scenarios more effectively than previous methods.
- The proposed technique aims to improve the speed and reliability of robot inspection tasks in applications like infrastructure monitoring, search and rescue, and industrial inspections.
Plain English Explanation
The paper focuses on the challenge of planning efficient paths for robots to inspect a given set of targets or areas of interest. This is an important problem in robotics with applications in infrastructure maintenance, disaster response, and industrial inspections.
The key insight is that by viewing the inspection planning problem through the lens of fixed-parameter tractability (FPT) from computer science, the researchers were able to develop a more effective algorithmic approach. FPT analysis allows them to identify the core "parameters" that drive the complexity of the inspection planning task and then design an algorithm that can solve the problem efficiently even as those parameters scale up.
The algorithm they propose can handle real-world constraints like obstacles, occlusions, and limited sensor ranges much better than previous methods. This should lead to more reliable and timely robot inspections in challenging environments. The approach could be especially useful for tasks like inspecting critical infrastructure or surveying disaster zones where speed and accuracy are paramount.
Technical Explanation
The paper formulates the robot inspection planning problem as finding a minimum-cost path for the robot to visit a set of target locations while satisfying various constraints. This is modeled as a variant of the well-known Traveling Salesman Problem, which is known to be computationally difficult in the general case.
The key technical insight is that by leveraging concepts from fixed-parameter tractability (FPT), the researchers are able to develop an algorithmic approach that can solve the inspection planning problem efficiently. FPT analysis allows them to identify the core "parameters" of the problem - such as the number of obstacles, the robot's sensor range, and the number of targets - and design an algorithm that can solve the problem quickly even as those parameters scale up.
Specifically, the proposed algorithm uses a combination of graph-theoretic techniques and integer programming to find an optimal or near-optimal inspection plan. Experiments on synthetic and real-world datasets demonstrate that this FPT-inspired approach outperforms previous state-of-the-art methods, especially as the problem size and complexity increases.
Critical Analysis
The paper presents a compelling technical approach to the robot inspection planning problem, with solid theoretical underpinnings and experimental validation. The FPT-based algorithm shows promising performance improvements over prior methods, which is an important step forward for practical applications.
That said, the paper does acknowledge some limitations of the current approach. For example, the algorithm assumes a static environment and does not explicitly handle dynamic obstacles or targets. Additionally, the reliance on integer programming may limit the scalability of the approach for extremely large-scale problems.
Further research could explore ways to extend the FPT-based techniques to handle more complex, real-world scenarios, such as partially-known environments or uncertain execution. Incorporating anytime replanning capabilities could also improve the algorithm's robustness to changes in the environment.
Overall, this paper represents an important contribution to the field of robot inspection planning, demonstrating the value of leveraging theoretical computer science concepts to tackle practical robotics challenges.
Conclusion
This paper presents a novel approach to robot inspection planning that draws on the principles of fixed-parameter tractability from computer science. By identifying and exploiting the core parameters that drive the complexity of the inspection planning problem, the researchers have developed an algorithm that can find efficient solutions even in the face of real-world constraints like obstacles and limited sensor ranges.
The experimental results show that this FPT-inspired approach outperforms previous state-of-the-art methods, especially as the problem scale and complexity increase. This is a significant advancement that could have broad implications for applications such as infrastructure monitoring, disaster response, and industrial inspections, where fast and reliable robot inspection capabilities are in high demand.
While the current technique has some limitations, the paper lays the groundwork for further research to extend the FPT-based methods to even more challenging real-world scenarios. By continuing to leverage theoretical computer science insights, the robotics community can make steady progress towards more capable and effective inspection planning systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Leveraging Fixed-Parameter Tractability for Robot Inspection Planning
Yosuke Mizutani, Daniel Coimbra Salomao, Alex Crane, Matthias Bentert, P{aa}l Gr{o}n{aa}s Drange, Felix Reidl, Alan Kuntz, Blair D. Sullivan
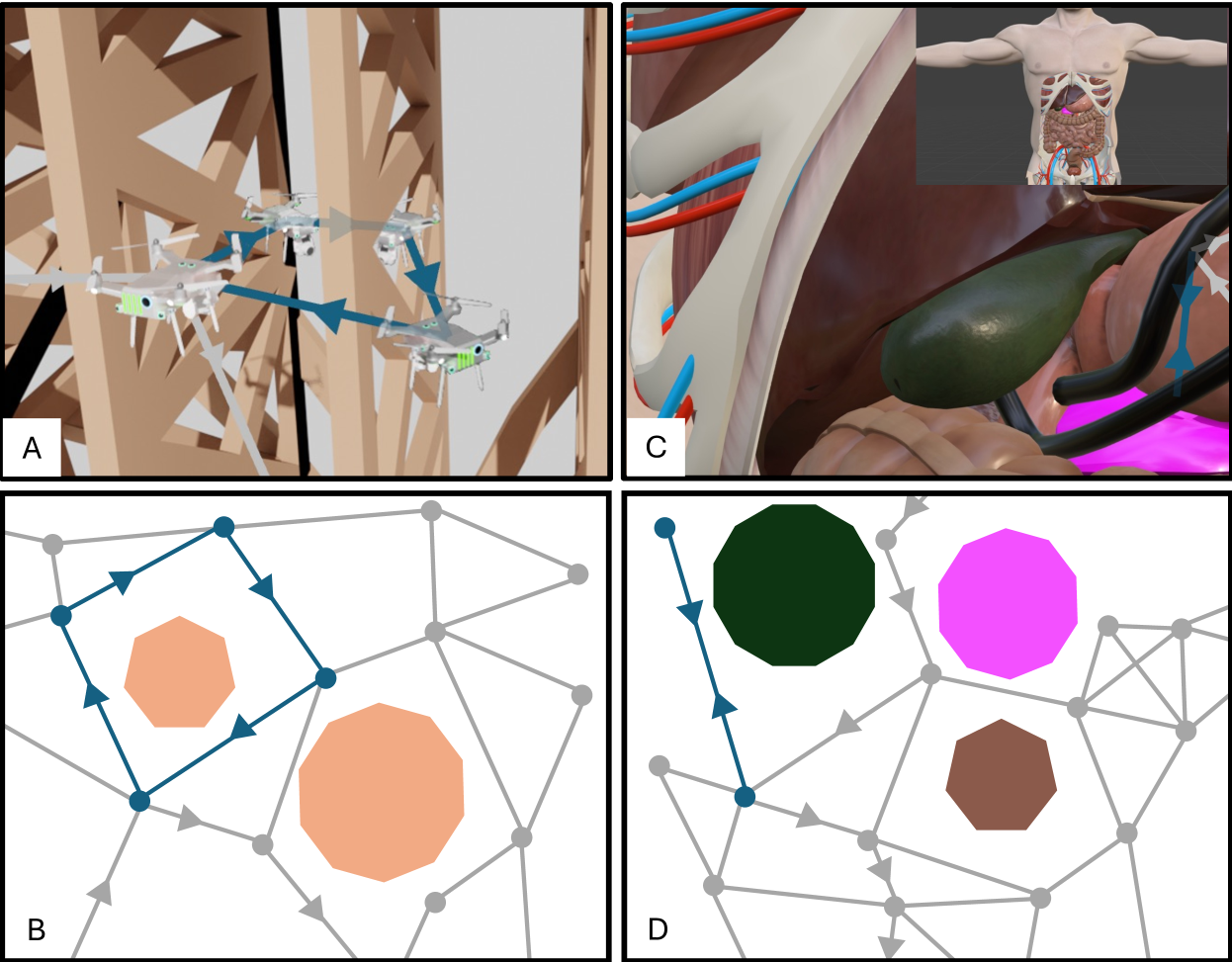
Autonomous robotic inspection, where a robot moves through its environment and inspects points of interest, has applications in industrial settings, structural health monitoring, and medicine. Planning the paths for a robot to safely and efficiently perform such an inspection is an extremely difficult algorithmic challenge. In this work we consider an abstraction of the inspection planning problem which we term Graph Inspection. We give two exact algorithms for this problem, using dynamic programming and integer linear programming. We analyze the performance of these methods, and present multiple approaches to achieve scalability. We demonstrate significant improvement both in path weight and inspection coverage over a state-of-the-art approach on two robotics tasks in simulation, a bridge inspection task by a UAV and a surgical inspection task using a medical robot.
Read more7/2/2024
➖
0
Inspection planning under execution uncertainty
Shmuel David Alpert, Kiril Solovey, Itzik Klein, Oren Salzman
Autonomous inspection tasks necessitate path-planning algorithms to efficiently gather observations from points of interest (POI). However, localization errors commonly encountered in urban environments can introduce execution uncertainty, posing challenges to successfully completing such tasks. Unfortunately, existing algorithms for inspection planning do not explicitly account for execution uncertainty, which can hinder their performance. To bridge this gap, we present IRIS-under uncertainty (IRIS-U^2), the first inspection-planning algorithm that offers statistical guarantees regarding coverage, path length, and collision probability. Our approach builds upon IRIS -- our framework for deterministic inspection planning, which is highly efficient and provably asymptotically-optimal. The extension to the much more involved uncertain setting is achieved by a refined search procedure that estimates POI coverage probabilities using Monte Carlo (MC) sampling. The efficacy of IRIS-U^2 is demonstrated through a case study focusing on structural inspections of bridges. Our approach exhibits improved expected coverage, reduced collision probability, and yields increasingly precise statistical guarantees as the number of MC samples grows. Furthermore, we demonstrate the potential advantages of computing bounded sub-optimal solutions to reduce computation time while maintaining statistical guarantees.
Read more4/12/2024
0
Graph Inspection for Robotic Motion Planning: Do Arithmetic Circuits Help?
Matthias Bentert, Daniel Coimbra Salomao, Alex Crane, Yosuke Mizutani, Felix Reidl, Blair D. Sullivan
We investigate whether algorithms based on arithmetic circuits are a viable alternative to existing solvers for Graph Inspection, a problem with direct application in robotic motion planning. Specifically, we seek to address the high memory usage of existing solvers. Aided by novel theoretical results enabling fast solution recovery, we implement a circuit-based solver for Graph Inspection which uses only polynomial space and test it on several realistic robotic motion planning datasets. In particular, we provide a comprehensive experimental evaluation of a suite of engineered algorithms for three key subroutines. While this evaluation demonstrates that circuit-based methods are not yet practically competitive for our robotics application, it also provides insights which may guide future efforts to bring circuit-based algorithms from theory to practice.
Read more9/14/2024
🏷️
0
Uncertainty-Aware Planning for Heterogeneous Robot Teams using Dynamic Topological Graphs and Mixed-Integer Programming
Cora A. Dimmig, Kevin C. Wolfe, Marin Kobilarov, Joseph Moore
Multi-robot planning and coordination in uncertain environments is a fundamental computational challenge, since the belief space increases exponentially with the number of robots. In this paper, we address the problem of planning in uncertain environments with a heterogeneous robot team comprised of fast scout vehicles for information gathering and more risk-averse carrier robots from which the scout vehicles are deployed. To overcome the computational challenges associated with multi-robot motion planning in the presence of environmental uncertainty, we represent the environment and operational scenario using a topological graph, where the edge weight distributions vary with the state of the robot team on the graph. While this belief space representation still scales exponentially with the number of robots, we formulate a computationally efficient mixed-integer program which is capable of generating optimal multi-robot plans in seconds. We evaluate our approach in a representative scenario where the robot team must move through an environment while minimizing detection by observers in positions that are uncertain to the robot team. We demonstrate that our approach is sufficiently computationally tractable for real-time re-planning in changing environments, can improve performance in the presence of imperfect information, and can be adjusted to accommodate different risk profiles.
Read more7/16/2024