GTA: Generative Trajectory Augmentation with Guidance for Offline Reinforcement Learning
2405.16907
0
0
Abstract
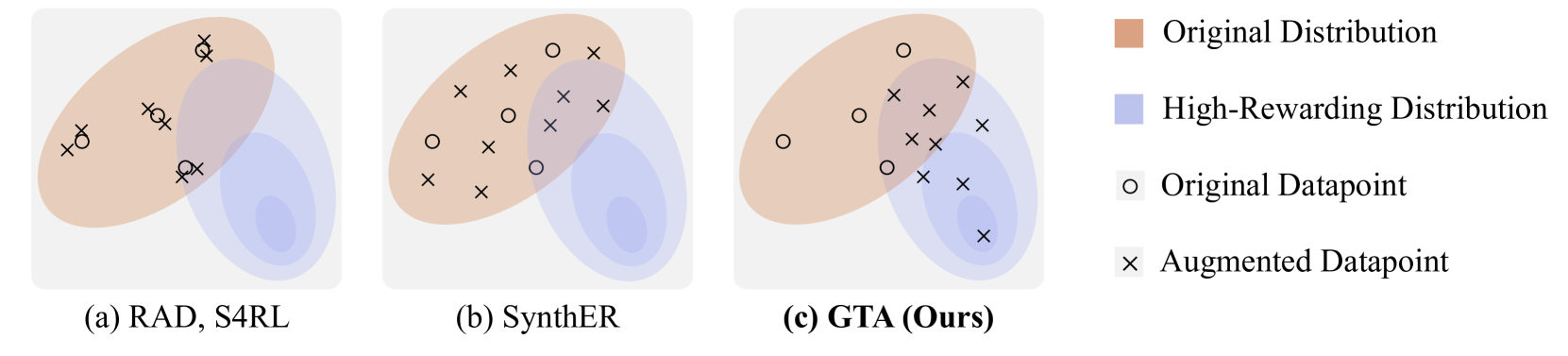
Offline Reinforcement Learning (Offline RL) presents challenges of learning effective decision-making policies from static datasets without any online interactions. Data augmentation techniques, such as noise injection and data synthesizing, aim to improve Q-function approximation by smoothing the learned state-action region. However, these methods often fall short of directly improving the quality of offline datasets, leading to suboptimal results. In response, we introduce textbf{GTA}, Generative Trajectory Augmentation, a novel generative data augmentation approach designed to enrich offline data by augmenting trajectories to be both high-rewarding and dynamically plausible. GTA applies a diffusion model within the data augmentation framework. GTA partially noises original trajectories and then denoises them with classifier-free guidance via conditioning on amplified return value. Our results show that GTA, as a general data augmentation strategy, enhances the performance of widely used offline RL algorithms in both dense and sparse reward settings. Furthermore, we conduct a quality analysis of data augmented by GTA and demonstrate that GTA improves the quality of the data. Our code is available at https://github.com/Jaewoopudding/GTA
Create account to get full access
Overview
- This paper presents a new approach called Generative Trajectory Augmentation (GTA) for offline reinforcement learning.
- GTA uses a generative model to create new, high-quality trajectories that can be added to the offline training dataset, improving the agent's performance.
- The authors demonstrate the effectiveness of GTA on several continuous control benchmark tasks, showing significant improvements over existing offline RL methods.
Plain English Explanation
In offline reinforcement learning, the agent learns from a fixed dataset of experiences, without the ability to interact with the environment directly. This is a challenging setting, as the agent must learn effective policies from limited data.
The GTA approach proposed in this paper aims to address this challenge by generating new, high-quality trajectories that can be added to the offline dataset. The key idea is to train a generative model that can produce realistic trajectories, similar to the ones in the original dataset. This allows the agent to learn from a much larger and more diverse set of experiences, leading to improved performance.
The authors use a combination of techniques, including diffusion models and data augmentation, to train the generative model and guide the trajectory generation process. This helps ensure that the generated trajectories are both realistic and beneficial for the agent's learning.
Technical Explanation
The GTA approach consists of two main components: a generative model for trajectory synthesis and a guidance mechanism to ensure the generated trajectories are useful for the agent's learning.
The generative model is based on a diffusion model, which is trained to generate realistic trajectories by gradually perturbing and then denoising a random input. This allows the model to capture the complex structure and dynamics of the trajectories in the offline dataset.
To guide the trajectory generation process, the authors introduce a reward prediction network that estimates the cumulative reward of a given trajectory. This reward prediction is used to bias the generative model towards producing trajectories that are likely to lead to high rewards, improving the quality and relevance of the generated data.
The authors evaluate GTA on a range of continuous control benchmark tasks, including classic control problems and robotic manipulation. The results show that GTA significantly outperforms existing offline RL methods, demonstrating the effectiveness of the approach in leveraging additional generated data to improve agent performance.
Critical Analysis
The paper provides a thorough evaluation of the GTA approach and addresses several potential limitations. The authors acknowledge that the success of GTA relies on the quality of the generative model and the accuracy of the reward prediction network. If these components are not well-trained, the generated trajectories may not be sufficiently realistic or useful for the agent's learning.
Additionally, the paper does not explore the scalability of GTA to more complex, high-dimensional environments. The benchmark tasks used in the evaluation are relatively simple, and it remains to be seen how well the approach would generalize to more challenging real-world problems.
Another potential issue is the computational overhead of the GTA approach, as training the generative model and reward prediction network can be resource-intensive. The authors do not provide a detailed analysis of the training time and computational requirements, which could be an important consideration for practical applications.
Despite these caveats, the GTA approach represents a promising direction for improving offline reinforcement learning, and the paper provides valuable insights into the use of generative models and guidance mechanisms in this domain. Researchers and practitioners interested in offline RL may find this work inspiring and worth further exploration.
Conclusion
The GTA approach presented in this paper offers a novel solution to the challenge of offline reinforcement learning. By leveraging a generative model to augment the offline dataset with high-quality trajectories, the agent can learn more effective policies and achieve significantly better performance compared to existing offline RL methods.
The successful application of GTA on continuous control benchmark tasks suggests its potential for real-world robotic and control applications, where offline data may be the only available resource for training. As the field of offline RL continues to evolve, the insights and techniques introduced in this paper may contribute to the development of more robust and data-efficient learning algorithms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

ATraDiff: Accelerating Online Reinforcement Learning with Imaginary Trajectories
Qianlan Yang, Yu-Xiong Wang
0
0
Training autonomous agents with sparse rewards is a long-standing problem in online reinforcement learning (RL), due to low data efficiency. Prior work overcomes this challenge by extracting useful knowledge from offline data, often accomplished through the learning of action distribution from offline data and utilizing the learned distribution to facilitate online RL. However, since the offline data are given and fixed, the extracted knowledge is inherently limited, making it difficult to generalize to new tasks. We propose a novel approach that leverages offline data to learn a generative diffusion model, coined as Adaptive Trajectory Diffuser (ATraDiff). This model generates synthetic trajectories, serving as a form of data augmentation and consequently enhancing the performance of online RL methods. The key strength of our diffuser lies in its adaptability, allowing it to effectively handle varying trajectory lengths and mitigate distribution shifts between online and offline data. Because of its simplicity, ATraDiff seamlessly integrates with a wide spectrum of RL methods. Empirical evaluation shows that ATraDiff consistently achieves state-of-the-art performance across a variety of environments, with particularly pronounced improvements in complicated settings. Our code and demo video are available at https://atradiff.github.io .
6/7/2024
Offline Trajectory Generalization for Offline Reinforcement Learning
Ziqi Zhao, Zhaochun Ren, Liu Yang, Fajie Yuan, Pengjie Ren, Zhumin Chen, jun Ma, Xin Xin
0
0
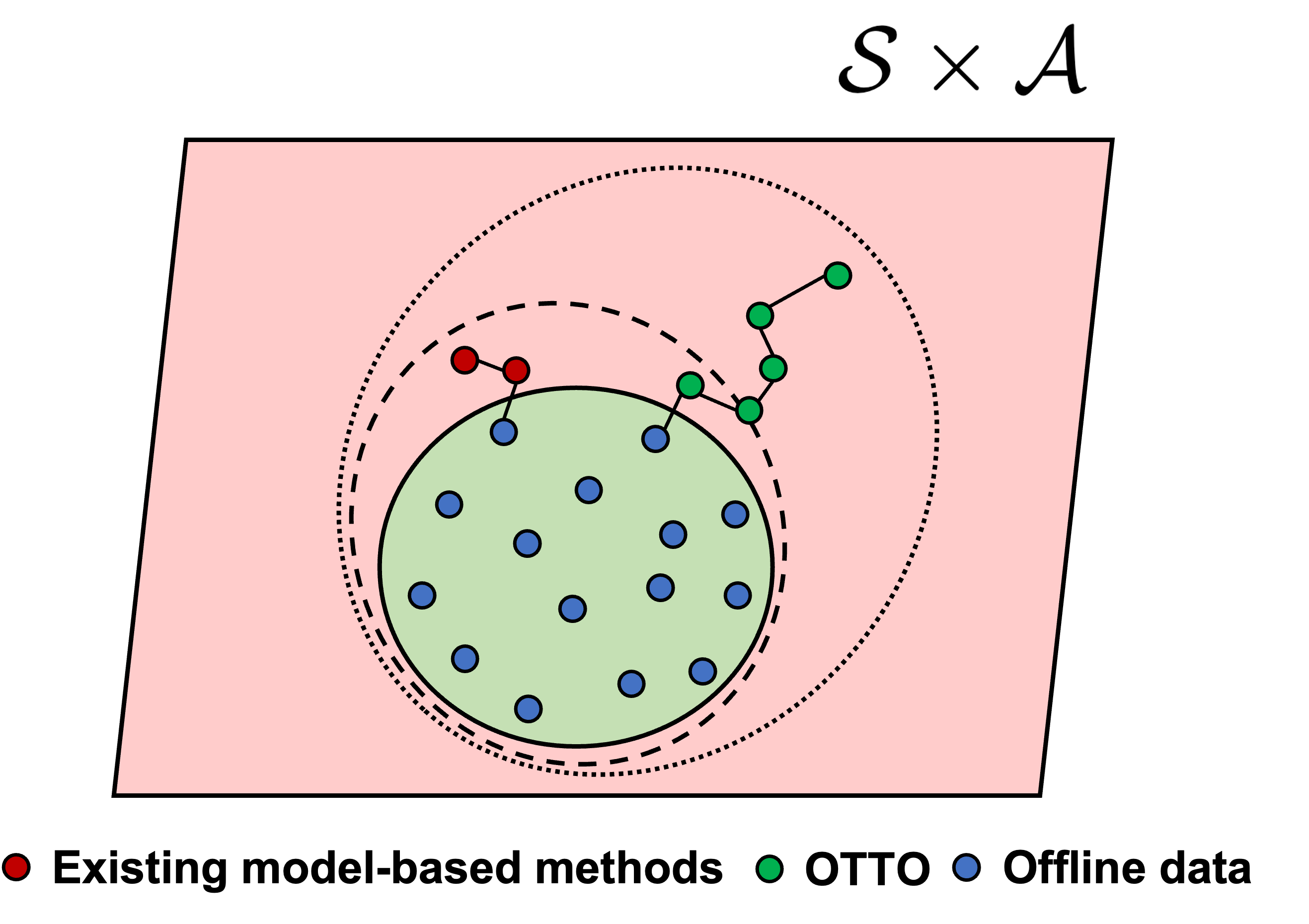
Offline reinforcement learning (RL) aims to learn policies from static datasets of previously collected trajectories. Existing methods for offline RL either constrain the learned policy to the support of offline data or utilize model-based virtual environments to generate simulated rollouts. However, these methods suffer from (i) poor generalization to unseen states; and (ii) trivial improvement from low-qualified rollout simulation. In this paper, we propose offline trajectory generalization through world transformers for offline reinforcement learning (OTTO). Specifically, we use casual Transformers, a.k.a. World Transformers, to predict state dynamics and the immediate reward. Then we propose four strategies to use World Transformers to generate high-rewarded trajectory simulation by perturbing the offline data. Finally, we jointly use offline data with simulated data to train an offline RL algorithm. OTTO serves as a plug-in module and can be integrated with existing offline RL methods to enhance them with better generalization capability of transformers and high-rewarded data augmentation. Conducting extensive experiments on D4RL benchmark datasets, we verify that OTTO significantly outperforms state-of-the-art offline RL methods.
4/17/2024

Causal Action Influence Aware Counterfactual Data Augmentation
N'uria Armengol Urp'i, Marco Bagatella, Marin Vlastelica, Georg Martius
0
0
Offline data are both valuable and practical resources for teaching robots complex behaviors. Ideally, learning agents should not be constrained by the scarcity of available demonstrations, but rather generalize beyond the training distribution. However, the complexity of real-world scenarios typically requires huge amounts of data to prevent neural network policies from picking up on spurious correlations and learning non-causal relationships. We propose CAIAC, a data augmentation method that can create feasible synthetic transitions from a fixed dataset without having access to online environment interactions. By utilizing principled methods for quantifying causal influence, we are able to perform counterfactual reasoning by swapping $it{action}$-unaffected parts of the state-space between independent trajectories in the dataset. We empirically show that this leads to a substantial increase in robustness of offline learning algorithms against distributional shift.
5/30/2024
Offline Imitation Learning with Model-based Reverse Augmentation
Jie-Jing Shao, Hao-Sen Shi, Lan-Zhe Guo, Yu-Feng Li
0
0
In offline Imitation Learning (IL), one of the main challenges is the textit{covariate shift} between the expert observations and the actual distribution encountered by the agent, because it is difficult to determine what action an agent should take when outside the state distribution of the expert demonstrations. Recently, the model-free solutions introduce the supplementary data and identify the latent expert-similar samples to augment the reliable samples during learning. Model-based solutions build forward dynamic models with conservatism quantification and then generate additional trajectories in the neighborhood of expert demonstrations. However, without reward supervision, these methods are often over-conservative in the out-of-expert-support regions, because only in states close to expert-observed states can there be a preferred action enabling policy optimization. To encourage more exploration on expert-unobserved states, we propose a novel model-based framework, called offline Imitation Learning with Self-paced Reverse Augmentation (SRA). Specifically, we build a reverse dynamic model from the offline demonstrations, which can efficiently generate trajectories leading to the expert-observed states in a self-paced style. Then, we use the subsequent reinforcement learning method to learn from the augmented trajectories and transit from expert-unobserved states to expert-observed states. This framework not only explores the expert-unobserved states but also guides maximizing long-term returns on these states, ultimately enabling generalization beyond the expert data. Empirical results show that our proposal could effectively mitigate the covariate shift and achieve the state-of-the-art performance on the offline imitation learning benchmarks. Project website: url{https://www.lamda.nju.edu.cn/shaojj/KDD24_SRA/}.
6/19/2024