Guess the Drift with LOP-UKF: LiDAR Odometry and Pacejka Model for Real-Time Racecar Sideslip Estimation

0
📈
Sign in to get full access
Overview
- This paper introduces a novel method called LOP-UKF for estimating vehicle lateral velocity using Lidar Odometry and the Pacejka tire model.
- Accurate lateral velocity estimation is crucial for vehicle safety and stability, but traditional methods often require costly sensors.
- The proposed LOP-UKF approach uses an Unscented Kalman Filter to integrate Lidar Odometry with the Pacejka tire model predictions, resulting in a robust estimation.
- The authors present experimental results using the Dallara AV-21 across diverse track conditions, demonstrating the effectiveness of their method.
Plain English Explanation
When a vehicle is turning or moving sideways, the angle between the direction it's facing and the direction it's moving is called the sideslip angle. This angle is crucial for ensuring the vehicle's safety and stability. To calculate the sideslip angle, you need to know both the vehicle's longitudinal (forward/backward) and lateral (sideways) velocities.
Measuring the lateral velocity component is often difficult and requires expensive sensors. Instead, vehicle manufacturers typically estimate the lateral velocity using various techniques. This paper introduces a new method called LOP-UKF that does a better job of estimating the lateral velocity.
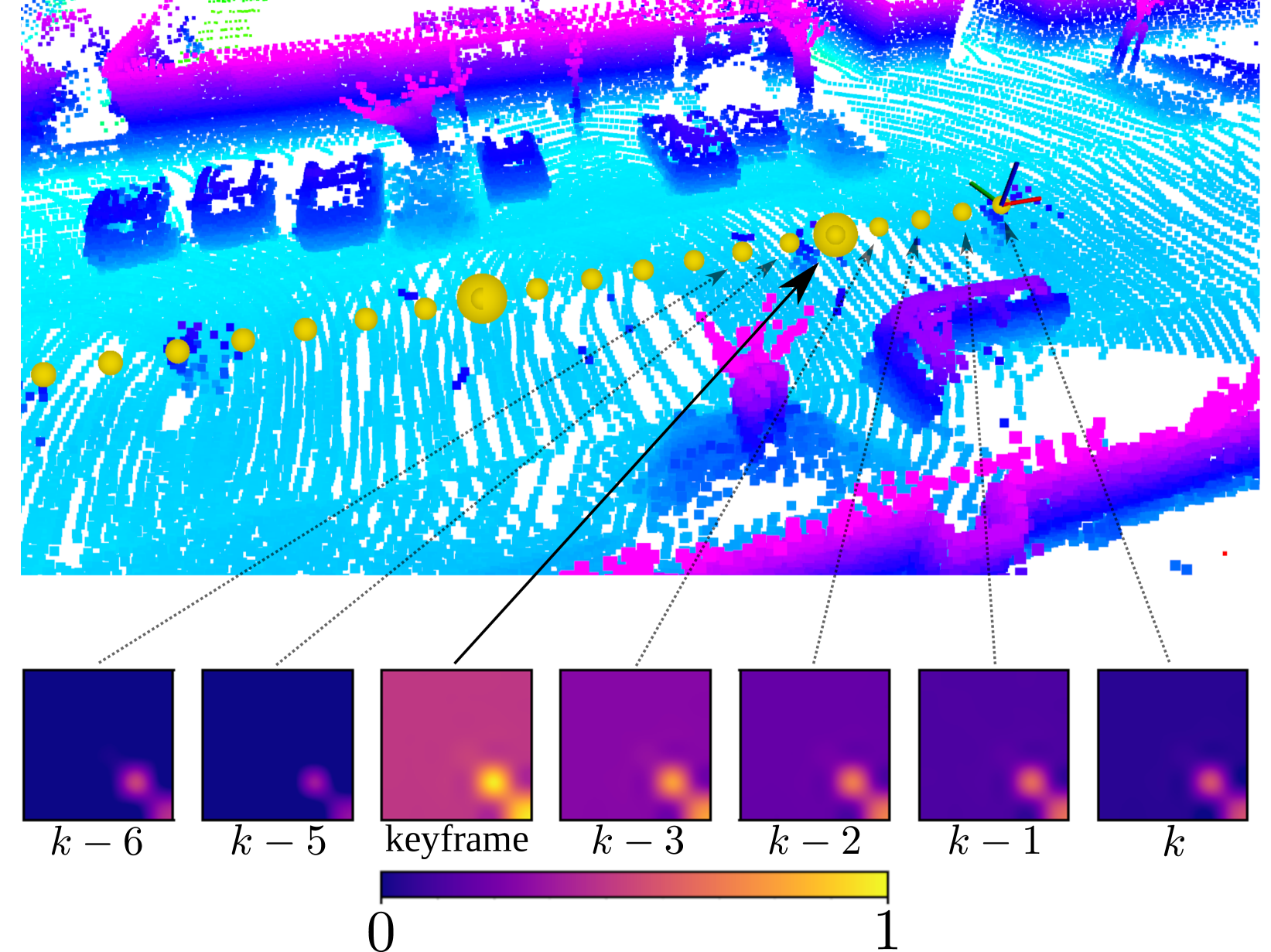
The LOP-UKF approach uses data from a Lidar Odometry system, which tracks the vehicle's motion using laser scanners, and combines it with predictions from the Pacejka tire model, a mathematical model that describes how a vehicle's tires interact with the road. This information is fed into an Unscented Kalman Filter, a statistical technique that allows them to estimate the lateral velocity more accurately than previous methods, even in challenging driving situations.
The authors tested their LOP-UKF system on the Dallara AV-21, a self-driving race car, and found that it performed well across a variety of different track conditions.
Technical Explanation
The paper introduces a novel approach called LOP-UKF for estimating the lateral velocity of a vehicle, which is a crucial input for determining the sideslip angle and ensuring vehicle stability and safety.
The LOP-UKF method integrates Lidar Odometry with the Pacejka tire model using an Unscented Kalman Filter (UKF). Lidar Odometry provides information about the vehicle's motion by tracking features in the environment using laser scanners, while the Pacejka tire model predicts the vehicle's lateral dynamics based on tire-road interactions.
By combining these two sources of information in the UKF, the LOP-UKF method is able to estimate the lateral velocity more robustly than previous approaches, even in challenging driving scenarios. The authors evaluate their system using the Dallara AV-21 self-driving race car across diverse track conditions and report favorable results.
Critical Analysis
The paper presents a comprehensive evaluation of the LOP-UKF method, including experiments conducted on the Dallara AV-21 platform under various track conditions. However, the authors acknowledge that their approach relies on the accuracy of the Pacejka tire model, which may not fully capture all the complexities of real-world tire-road interactions, especially in extreme driving scenarios.
Additionally, the study is limited to a single vehicle platform, and further research may be needed to assess the performance and generalizability of the LOP-UKF method across a wider range of vehicle types and driving conditions. It would also be valuable to compare the LOP-UKF approach to other Lidar-based odometry and Radar-based odometry techniques, as well as tightly-coupled sensor fusion methods, to better understand its relative strengths and weaknesses.
Conclusion
The LOP-UKF method presented in this paper offers a promising approach for estimating the lateral velocity of a vehicle, a critical parameter for ensuring safety and stability. By integrating Lidar Odometry with the Pacejka tire model using an Unscented Kalman Filter, the authors demonstrate a robust and effective solution, even in challenging driving conditions.
The experimental results on the Dallara AV-21 self-driving race car are encouraging and suggest that the LOP-UKF method could be a valuable tool for the development of advanced driver assistance systems and autonomous vehicles. Further research and validation across a wider range of platforms and scenarios would help to solidify the broader applicability of this innovative technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Guess the Drift with LOP-UKF: LiDAR Odometry and Pacejka Model for Real-Time Racecar Sideslip Estimation
Alessandro Toschi, Nicola Musiu, Francesco Gatti, Ayoub Raji, Francesco Amerotti, Micaela Verucchi, Marko Bertogna
The sideslip angle, crucial for vehicle safety and stability, is determined using both longitudinal and lateral velocities. However, measuring the lateral component often necessitates costly sensors, leading to its common estimation, a topic thoroughly explored in existing literature. This paper introduces LOP-UKF, a novel method for estimating vehicle lateral velocity by integrating Lidar Odometry with the Pacejka tire model predictions, resulting in a robust estimation via an Unscendent Kalman Filter (UKF). This combination represents a distinct alternative to more traditional methodologies, resulting in a reliable solution also in edge cases. We present experimental results obtained using the Dallara AV-21 across diverse circuits and track conditions, demonstrating the effectiveness of our method.
Read more5/10/2024

0
Learning dynamics models for velocity estimation in autonomous racing
Jan Wk{e}grzynowski, Grzegorz Czechmanowski, Piotr Kicki, Krzysztof Walas
Velocity estimation is of great importance in autonomous racing. Still, existing solutions are characterized by limited accuracy, especially in the case of aggressive driving or poor generalization to unseen road conditions. To address these issues, we propose to utilize Unscented Kalman Filter (UKF) with a learned dynamics model that is optimized directly for the state estimation task. Moreover, we propose to aid this model with the online-estimated friction coefficient, which increases the estimation accuracy and enables zero-shot adaptation to the new road conditions. To evaluate the UKF-based velocity estimator with the proposed dynamics model, we introduced a publicly available dataset of aggressive manoeuvres performed by an F1TENTH car, with sideslip angles reaching 40{deg}. Using this dataset, we show that learning the dynamics model through UKF leads to improved estimation performance and that the proposed solution outperforms state-of-the-art learning-based state estimators by 17% in the nominal scenario. Moreover, we present unseen zero-shot adaptation abilities of the proposed method to the new road surface thanks to the use of the proposed learning-based tire dynamics model with online friction estimation.
Read more8/29/2024
0
MAD-ICP: It Is All About Matching Data -- Robust and Informed LiDAR Odometry
Simone Ferrari, Luca Di Giammarino, Leonardo Brizi, Giorgio Grisetti
LiDAR odometry is the task of estimating the ego-motion of the sensor from sequential laser scans. This problem has been addressed by the community for more than two decades, and many effective solutions are available nowadays. Most of these systems implicitly rely on assumptions about the operating environment, the sensor used, and motion pattern. When these assumptions are violated, several well-known systems tend to perform poorly. This paper presents a LiDAR odometry system that can overcome these limitations and operate well under different operating conditions while achieving performance comparable with domain-specific methods. Our algorithm follows the well-known ICP paradigm that leverages a PCA-based kd-tree implementation that is used to extract structural information about the clouds being registered and to compute the minimization metric for the alignment. The drift is bound by managing the local map based on the estimated uncertainty of the tracked pose. To benefit the community, we release an open-source C++ anytime real-time implementation.
Read more5/10/2024
💬
0
LIO-EKF: High Frequency LiDAR-Inertial Odometry using Extended Kalman Filters
Yibin Wu, Tiziano Guadagnino, Louis Wiesmann, Lasse Klingbeil, Cyrill Stachniss, Heiner Kuhlmann
Odometry estimation is crucial for every autonomous system requiring navigation in an unknown environment. In modern mobile robots, 3D LiDAR-inertial systems are often used for this task. By fusing LiDAR scans and IMU measurements, these systems can reduce the accumulated drift caused by sequentially registering individual LiDAR scans and provide a robust pose estimate. Although effective, LiDAR-inertial odometry systems require proper parameter tuning to be deployed. In this paper, we propose LIO-EKF, a tightly-coupled LiDAR-inertial odometry system based on point-to-point registration and the classical extended Kalman filter scheme. We propose an adaptive data association that considers the relative pose uncertainty, the map discretization errors, and the LiDAR noise. In this way, we can substantially reduce the parameters to tune for a given type of environment. The experimental evaluation suggests that the proposed system performs on par with the state-of-the-art LiDAR-inertial odometry pipelines but is significantly faster in computing the odometry. The source code of our implementation is publicly available (https://github.com/YibinWu/LIO-EKF).
Read more5/9/2024