Gyro-based Neural Single Image Deblurring

0

Sign in to get full access
Overview
- Proposes a novel neural network architecture called "GyroDeblurNet" for single image deblurring that leverages gyroscope data
- Demonstrates improved deblurring performance compared to prior state-of-the-art methods
- Introduces a new dataset of blurred images paired with gyroscope data to train and evaluate the proposed model
Plain English Explanation
Gyro-based Neural Single Image Deblurring addresses the challenge of restoring sharp, clear images from blurry ones. Blurry images can occur due to camera shake or the movement of the subject, which causes the light from the scene to be captured across multiple pixels over time. The researchers developed a neural network called "GyroDeblurNet" that uses data from the device's gyroscope - a sensor that measures rotational movement - to help reconstruct the original sharp image.
The key insight is that the gyroscope data can provide valuable information about the camera's motion during the exposure time, which can be leveraged to undo the blurring effect. By incorporating this additional sensor data, the neural network is able to better estimate the blur kernel and restore the original image, leading to higher quality results compared to previous deblurring methods that only used the blurry image itself.
To train and evaluate their model, the researchers also introduced a new dataset of blurry images paired with corresponding gyroscope measurements. This dataset enables the neural network to learn the relationship between the camera motion and the resulting blur, which it can then apply to restore unseen blurry images.
Technical Explanation
GyroDeblurNet is a deep learning-based architecture for single image deblurring that takes advantage of gyroscope data. The model consists of several key components:
- Feature Extraction: The blurry input image and the gyroscope data are passed through separate feature extraction modules to obtain high-level representations.
- Feature Fusion: The extracted features from the image and gyroscope data are then combined using a fusion module to leverage the complementary information.
- Deblurring: The fused features are processed by a deblurring module, which estimates the blur kernel and applies a deconvolution operation to restore the sharp image.
The researchers trained and evaluated GyroDeblurNet on a new dataset they created, which contains pairs of blurry images and corresponding gyroscope measurements. This dataset was collected using various camera setups and capture conditions to ensure the model generalizes well to a wide range of scenarios.
Experiments showed that GyroDeblurNet outperformed previous state-of-the-art single image deblurring methods, both in terms of objective quality metrics and subjective visual assessments. The gyroscope data was found to be a valuable source of information that aided the neural network in better estimating the blur and restoring the original sharp image.
Critical Analysis
The GyroDeblurNet approach represents an interesting and promising direction for single image deblurring, as it leverages additional sensor data to improve upon prior techniques that only use the blurry image itself. However, the paper also acknowledges several limitations and areas for further research:
- Dataset Size and Diversity: While the introduced dataset is a valuable contribution, the authors note that it could be expanded to cover an even broader range of camera setups and capture conditions to further improve the model's generalization.
- Gyroscope Limitations: Gyroscopes have inherent limitations, such as noise and drift, which may impact the performance of the system in certain scenarios. Exploring ways to mitigate these limitations could lead to even better deblurring results.
- Real-time Feasibility: The current GyroDeblurNet implementation may not be suitable for real-time applications due to its computational complexity. Investigating more efficient architectures or inference techniques could enable the deployment of the system in practical, time-sensitive scenarios.
Additionally, future research could explore ways to dynamically combine the gyroscope and image data, or pre-train the model on large-scale datasets to further improve the deblurring performance.
Conclusion
The Gyro-based Neural Single Image Deblurring paper presents a novel neural network architecture, GyroDeblurNet, that leverages gyroscope data to significantly improve single image deblurring performance compared to prior state-of-the-art methods. By fusing the information from the blurry image and the gyroscope measurements, the model is able to better estimate the blur and restore the original sharp image.
This research highlights the potential of incorporating additional sensor data, such as gyroscope readings, to tackle challenging computer vision problems like image deblurring. As mobile devices and cameras continue to integrate more advanced sensors, the ability to leverage these rich data sources could lead to transformative improvements in various image processing and computational photography applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gyro-based Neural Single Image Deblurring
Heemin Yang, Jaesung Rim, Seungyong Lee, Seung-Hwan Baek, Sunghyun Cho
In this paper, we present GyroDeblurNet, a novel single image deblurring method that utilizes a gyro sensor to effectively resolve the ill-posedness of image deblurring. The gyro sensor provides valuable information about camera motion during exposure time that can significantly improve deblurring quality. However, effectively exploiting real-world gyro data is challenging due to significant errors from various sources including sensor noise, the disparity between the positions of a camera module and a gyro sensor, the absence of translational motion information, and moving objects whose motions cannot be captured by a gyro sensor. To handle gyro error, GyroDeblurNet is equipped with two novel neural network blocks: a gyro refinement block and a gyro deblurring block. The gyro refinement block refines the error-ridden gyro data using the blur information from the input image. On the other hand, the gyro deblurring block removes blur from the input image using the refined gyro data and further compensates for gyro error by leveraging the blur information from the input image. For training a neural network with erroneous gyro data, we propose a training strategy based on the curriculum learning. We also introduce a novel gyro data embedding scheme to represent real-world intricate camera shakes. Finally, we present a synthetic dataset and a real dataset for the training and evaluation of gyro-based single image deblurring. Our experiments demonstrate that our approach achieves state-of-the-art deblurring quality by effectively utilizing erroneous gyro data.
Read more4/9/2024
0
Deep Hybrid Camera Deblurring for Smartphone Cameras
Jaesung Rim, Junyong Lee, Heemin Yang, Sunghyun Cho
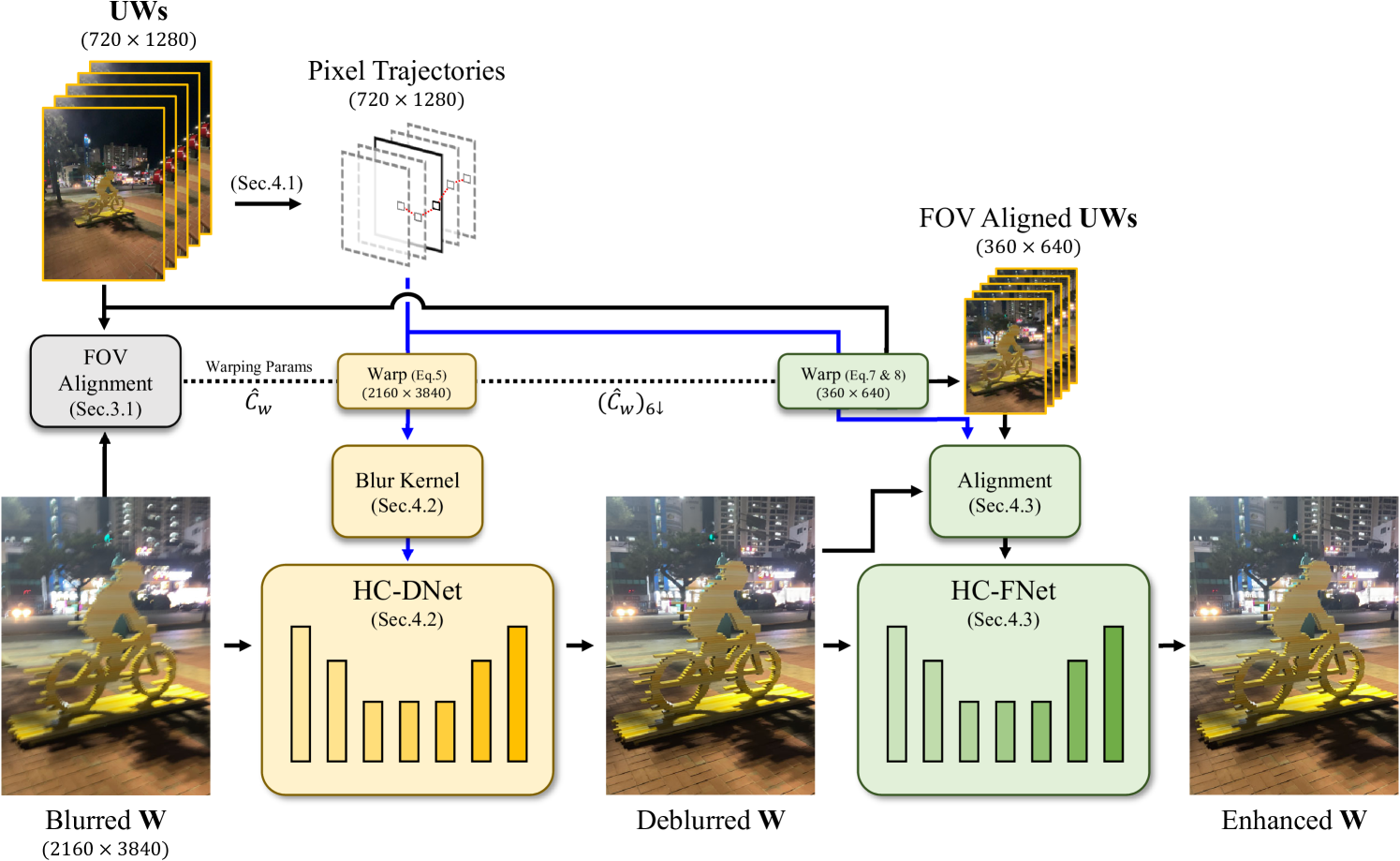
Mobile cameras, despite their significant advancements, still have difficulty in low-light imaging due to compact sensors and lenses, leading to longer exposures and motion blur. Traditional blind deconvolution methods and learning-based deblurring methods can be potential solutions to remove blur. However, achieving practical performance still remains a challenge. To address this, we propose a learning-based deblurring framework for smartphones, utilizing wide and ultra-wide cameras as a hybrid camera system. We simultaneously capture a long-exposure wide image and short-exposure burst ultra-wide images, and utilize the burst images to deblur the wide image. To fully exploit burst ultra-wide images, we present HCDeblur, a practical deblurring framework that includes novel deblurring networks, HC-DNet and HC-FNet. HC-DNet utilizes motion information extracted from burst images to deblur a wide image, and HC-FNet leverages burst images as reference images to further enhance a deblurred output. For training and evaluating the proposed method, we introduce the HCBlur dataset, which consists of synthetic and real-world datasets. Our experiments demonstrate that HCDeblur achieves state-of-the-art deblurring quality. Code and datasets are available at https://cg.postech.ac.kr/research/HCDeblur.
Read more7/26/2024

0
TinyGC-Net: An Extremely Tiny Network for Calibrating MEMS Gyroscopes
Cui Chao, Zhao Jiankang
This paper presents a learning-based method for calibrating and denoising microelectromechanical system (MEMS) gyroscopes, which is designed based on a convolutional network, and only contains hundreds of parameters, so the network can be trained on a graphics processing unit (GPU) before being deployed on a microcontroller unit (MCU) with limited computational resources. In this method, the neural network model takes only the raw measurements from the gyroscope as input values, and handles the calibration and noise reduction tasks separately to ensure interpretability. The proposed method is validated on public datasets and real-world experiments, without relying on a specific dataset for training in contrast to existing learning-based methods. The experimental results demonstrate the practicality and effectiveness of the proposed method, suggesting that this technique is a viable candidate for applications that require IMUs.
Read more4/15/2024
🌀
0
Toward Efficient Visual Gyroscopes: Spherical Moments, Harmonics Filtering, and Masking Techniques for Spherical Camera Applications
Yao Du, Carlos M. Mateo, Mirjana Maras, Tsun-Hsuan Wang, Marc Blanchon, Alexander Amini, Daniela Rus, Omar Tahri
Unlike a traditional gyroscope, a visual gyroscope estimates camera rotation through images. The integration of omnidirectional cameras, offering a larger field of view compared to traditional RGB cameras, has proven to yield more accurate and robust results. However, challenges arise in situations that lack features, have substantial noise causing significant errors, and where certain features in the images lack sufficient strength, leading to less precise prediction results. Here, we address these challenges by introducing a novel visual gyroscope, which combines an analytical method with a neural network approach to provide a more efficient and accurate rotation estimation from spherical images. The presented method relies on three key contributions: an adapted analytical approach to compute the spherical moments coefficients, introduction of masks for better global feature representation, and the use of a multilayer perceptron to adaptively choose the best combination of masks and filters. Experimental results demonstrate superior performance of the proposed approach in terms of accuracy. The paper emphasizes the advantages of integrating machine learning to optimize analytical solutions, discusses limitations, and suggests directions for future research.
Read more4/3/2024