Harnessing the Potential of Omnidirectional Multi-Rotor Aerial Vehicles in Cooperative Jamming Against Eavesdropping

0
🖼️
Sign in to get full access
Overview
- This paper explores the use of omnidirectional multi-rotor aerial vehicles for cooperative jamming against eavesdropping.
- The researchers investigate how these vehicles can be harnessed to enhance secure wireless communications.
- The study aims to develop strategies for deploying and coordinating multi-rotor vehicles to protect against eavesdropping threats.
Plain English Explanation
The paper focuses on using a special type of drone called an "omnidirectional multi-rotor aerial vehicle" to help prevent eavesdropping on wireless communications. Eavesdropping is when someone secretly listens in on a private conversation or data transmission.
The researchers wanted to explore how these drones, which can fly in any direction, could be used in a group to actively jam or disrupt eavesdropping attempts. By coordinating the drones to generate interference signals, they hope to create a protective "jamming zone" that blocks eavesdroppers from intercepting the target wireless communications.
The key idea is to harness the flexibility and mobility of these multi-rotor drones to establish a secure wireless communications environment, even in the presence of potential eavesdroppers. The paper investigates strategies for deploying and controlling the drone swarm to optimize the jamming coverage and effectiveness.
Technical Explanation
The paper proposes a system that leverages omnidirectional multi-rotor aerial vehicles to provide cooperative jamming against eavesdropping threats in wireless communication scenarios.
The researchers develop a multi-agent coordination framework to deploy and control a swarm of these drones, which can dynamically adjust their positions and generate interference signals to disrupt eavesdropping attempts.
Key components of the system include:
- Drone Mobility: The omnidirectional flight capabilities of the multi-rotor vehicles allow them to rapidly reposition and reconfigure the jamming coverage area.
- Coordination Strategies: The multi-agent coordination framework enables the drone swarm to collectively optimize their positions and jamming signals to effectively counter eavesdropping threats.
- Jamming Signal Generation: The drones generate carefully crafted interference signals that selectively target the eavesdropper's communication channels without disrupting the intended wireless transmission.
Through simulation and analysis, the researchers demonstrate the effectiveness of their proposed system in enhancing the security of wireless communications by obstructing eavesdropping attempts.
Critical Analysis
The paper provides a promising approach to securing wireless communications against eavesdropping using omnidirectional multi-rotor aerial vehicles. However, the research also acknowledges several potential limitations and areas for further investigation:
- Real-world Deployment Challenges: While the simulations show the system's effectiveness, the researchers note that actual real-world implementation may face additional challenges, such as environmental factors, drone reliability, and regulatory constraints.
- Eavesdropper Countermeasures: The paper does not address the possibility of the eavesdropper employing advanced techniques to detect or circumvent the jamming signals, which could limit the long-term effectiveness of the proposed system.
- Energy Consumption and Operational Duration: The high-mobility and continuous jamming operation of the drone swarm may pose significant energy and endurance challenges, which could impact the practical feasibility and deployment duration of the system.
Further research is needed to address these limitations and explore strategies to enhance the robustness, scalability, and real-world applicability of the cooperative jamming system.
Conclusion
This paper presents an innovative approach to leveraging omnidirectional multi-rotor aerial vehicles for enhancing the security of wireless communications against eavesdropping threats. By coordinating a swarm of these highly maneuverable drones to generate targeted jamming signals, the researchers demonstrate a promising method for establishing a secure wireless environment.
The key contribution of this work is the development of a multi-agent coordination framework that enables the drone swarm to dynamically adapt their positions and jamming strategies to effectively counter eavesdropping attempts. While the research highlights some potential limitations, the overall findings suggest that this cooperative jamming approach could have significant implications for improving wireless security in various applications, from military communications to critical infrastructure protection.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
0
Harnessing the Potential of Omnidirectional Multi-Rotor Aerial Vehicles in Cooperative Jamming Against Eavesdropping
Daniel Bonilla Licea, Hajar El Hammouti, Giuseppe Silano, Martin Saska
Recent research in communications-aware robotics has been propelled by advancements in 5G and emerging 6G technologies. This field now includes the integration of Multi-Rotor Aerial Vehicles (MRAVs) into cellular networks, with a specific focus on under-actuated MRAVs. These vehicles face challenges in independently controlling position and orientation due to their limited control inputs, which adversely affects communication metrics such as Signal-to-Noise Ratio. In response, a newer class of omnidirectional MRAVs has been developed, which can control both position and orientation simultaneously by tilting their propellers. However, exploiting this capability fully requires sophisticated motion planning techniques. This paper presents a novel application of omnidirectional MRAVs designed to enhance communication security and thwart eavesdropping. It proposes a strategy where one MRAV functions as an aerial Base Station, while another acts as a friendly jammer to secure communications. This study is the first to apply such a strategy to MRAVs in scenarios involving eavesdroppers.
Read more9/4/2024
0
Two-Way Aerial Secure Communications via Distributed Collaborative Beamforming under Eavesdropper Collusion
Jiahui Li, Geng Sun, Qingqing Wu, Shuang Liang, Pengfei Wang, Dusit Niyato
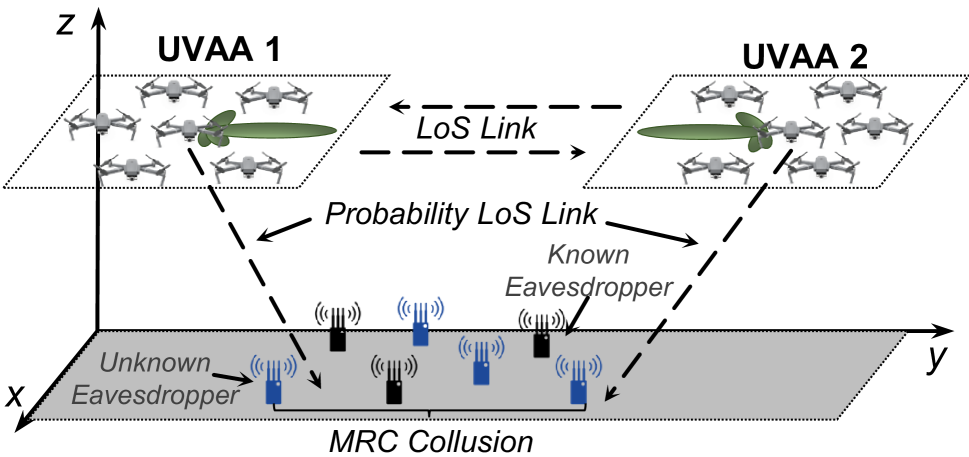
Unmanned aerial vehicles (UAVs)-enabled aerial communication provides a flexible, reliable, and cost-effective solution for a range of wireless applications. However, due to the high line-of-sight (LoS) probability, aerial communications between UAVs are vulnerable to eavesdropping attacks, particularly when multiple eavesdroppers collude. In this work, we aim to introduce distributed collaborative beamforming (DCB) into UAV swarms and handle the eavesdropper collusion by controlling the corresponding signal distributions. Specifically, we consider a two-way DCB-enabled aerial communication between two UAV swarms and construct these swarms as two UAV virtual antenna arrays. Then, we minimize the two-way known secrecy capacity and the maximum sidelobe level to avoid information leakage from the known and unknown eavesdroppers, respectively. Simultaneously, we also minimize the energy consumption of UAVs for constructing virtual antenna arrays. Due to the conflicting relationships between secure performance and energy efficiency, we consider these objectives as a multi-objective optimization problem. Following this, we propose an enhanced multi-objective swarm intelligence algorithm via the characterized properties of the problem. Simulation results show that our proposed algorithm can obtain a set of informative solutions and outperform other state-of-the-art baseline algorithms. Experimental tests demonstrate that our method can be deployed in limited computing power platforms of UAVs and is beneficial for saving computational resources.
Read more4/12/2024

0
UAV-enabled Collaborative Beamforming via Multi-Agent Deep Reinforcement Learning
Saichao Liu, Geng Sun, Jiahui Li, Shuang Liang, Qingqing Wu, Pengfei Wang, Dusit Niyato
In this paper, we investigate an unmanned aerial vehicle (UAV)-assistant air-to-ground communication system, where multiple UAVs form a UAV-enabled virtual antenna array (UVAA) to communicate with remote base stations by utilizing collaborative beamforming. To improve the work efficiency of the UVAA, we formulate a UAV-enabled collaborative beamforming multi-objective optimization problem (UCBMOP) to simultaneously maximize the transmission rate of the UVAA and minimize the energy consumption of all UAVs by optimizing the positions and excitation current weights of all UAVs. This problem is challenging because these two optimization objectives conflict with each other, and they are non-concave to the optimization variables. Moreover, the system is dynamic, and the cooperation among UAVs is complex, making traditional methods take much time to compute the optimization solution for a single task. In addition, as the task changes, the previously obtained solution will become obsolete and invalid. To handle these issues, we leverage the multi-agent deep reinforcement learning (MADRL) to address the UCBMOP. Specifically, we use the heterogeneous-agent trust region policy optimization (HATRPO) as the basic framework, and then propose an improved HATRPO algorithm, namely HATRPO-UCB, where three techniques are introduced to enhance the performance. Simulation results demonstrate that the proposed algorithm can learn a better strategy compared with other methods. Moreover, extensive experiments also demonstrate the effectiveness of the proposed techniques.
Read more4/12/2024
👨🏫
0
Geometric Tracking Control of Omnidirectional Multirotors for Aggressive Maneuvers
Hyungyu Lee, Sheng Cheng, Zhuohuan Wu, Jaeyoung Lim, Roland Siegwart, Naira Hovakimyan
An omnidirectional multirotor has the maneuverability of decoupled translational and rotational motions, superseding the traditional multirotors' motion capability. Such maneuverability is achieved due to the ability of the omnidirectional multirotor to frequently alter the thrust amplitude and direction. In doing so, the rotors' settling time, which is induced by inherent rotor dynamics, significantly affects the omnidirectional multirotor's tracking performance, especially in aggressive flights. To resolve this issue, we propose a novel tracking controller that takes the rotor dynamics into account and does not require additional rotor state measurement. We prove that the proposed controller yields almost global exponential stability. The proposed controller is validated in experiments, where we demonstrate significantly improved tracking performance in multiple aggressive maneuvers compared with a baseline geometric PD controller.
Read more8/19/2024