Geometric Tracking Control of Omnidirectional Multirotors for Aggressive Maneuvers

0
👨🏫
Sign in to get full access
Overview
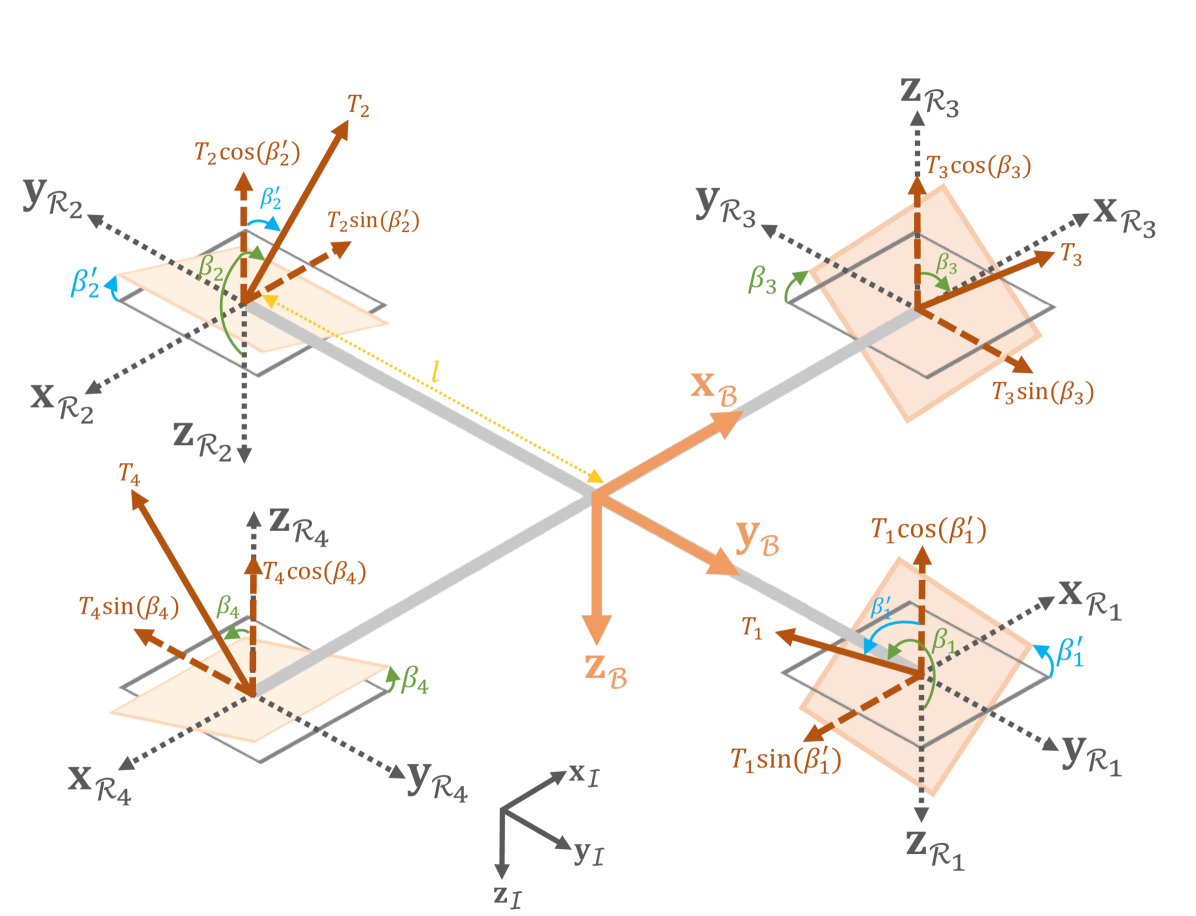
- Omnidirectional multirotors have enhanced maneuverability compared to traditional multirotors, with decoupled translational and rotational motions.
- This maneuverability is achieved by the ability to frequently adjust the thrust amplitude and direction.
- The rotor dynamics, specifically the settling time, significantly impact the tracking performance of omnidirectional multirotors during aggressive flights.
- The paper proposes a novel tracking controller that accounts for rotor dynamics without requiring additional rotor state measurement.
- The proposed controller is shown to provide almost global exponential stability.
- Experiments demonstrate significantly improved tracking performance over a baseline geometric PD controller during aggressive maneuvers.
Plain English Explanation
The paper discusses omnidirectional multirotors, which are a type of drone or multirotor aircraft that can move in any direction. Unlike traditional multirotors, these have the ability to independently control their translation (movement) and rotation, making them much more maneuverable.
This enhanced maneuverability is achieved by the omnidirectional multirotor's ability to constantly adjust the power and direction of its rotors. However, the inherent dynamics of the rotors, specifically the time it takes for them to "settle" after a change, can significantly impact the aircraft's ability to accurately track a desired flight path, especially during aggressive or fast-paced maneuvers.
To address this issue, the researchers developed a new control system that takes the rotor dynamics into account, without requiring additional sensors to measure the rotor states. They were able to mathematically prove that this new control system provides
Through experiments, the researchers demonstrated that this new control system significantly improves the omnidirectional multirotor's tracking performance compared to a baseline control system, even during very aggressive flight maneuvers. This could enable these highly maneuverable aircraft to perform complex tasks with greater precision and reliability.
Technical Explanation
The key technical contributions of the paper are:
-
Rotor Dynamics Model: The researchers developed a model to capture the inherent dynamics of the omnidirectional multirotor's rotors, specifically the settling time after changes in thrust. This settling time can degrade the aircraft's tracking performance during aggressive maneuvers.
-
Tracking Controller Design: The researchers proposed a novel tracking controller that takes the rotor dynamics into account, without requiring additional sensors to measure the rotor states. This is important, as adding more sensors can increase the complexity and cost of the system.
-
Stability Analysis: The researchers were able to mathematically prove that their proposed tracking controller yields
almost global exponential stability . This means the controller will reliably drive the omnidirectional multirotor to the desired trajectory from a wide range of initial conditions. -
Experimental Validation: The researchers conducted experiments to validate the performance of their proposed controller. They demonstrated significantly improved tracking accuracy during aggressive maneuvers compared to a baseline geometric PD controller.
Critical Analysis
The paper addresses an important challenge in the control of omnidirectional multirotors – the impact of rotor dynamics on tracking performance during aggressive flights. The researchers' proposed solution, which integrates the rotor dynamics into the tracking controller without requiring additional sensors, is a clever and practical approach.
One potential limitation of the research is that it was validated only through experiments, and not tested in real-world scenarios with factors like wind, sensor noise, and other environmental disturbances. Additionally, the paper does not discuss the computational complexity of the proposed controller, which could be a consideration for implementation on resource-constrained onboard systems.
Further research could explore adaptations of the controller to handle a wider range of real-world conditions, as well as optimizations to reduce the computational burden. Comparisons to other advanced control techniques, such as nonlinear model predictive control, could also provide additional insights.
Conclusion
This paper presents a novel tracking controller for omnidirectional multirotors that addresses the challenge of rotor dynamics, which can degrade tracking performance during aggressive maneuvers. By incorporating the rotor dynamics into the control system without requiring additional sensors, the researchers were able to develop a solution with
The enhanced tracking capabilities enabled by this new control system could unlock a wide range of applications for omnidirectional multirotors, from aerial cinematography to search and rescue operations. As the field of overactuated aerial vehicles continues to advance, this research represents an important step forward in improving the precision and agility of these highly maneuverable aircraft.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
👨🏫
0
Geometric Tracking Control of Omnidirectional Multirotors for Aggressive Maneuvers
Hyungyu Lee, Sheng Cheng, Zhuohuan Wu, Jaeyoung Lim, Roland Siegwart, Naira Hovakimyan
An omnidirectional multirotor has the maneuverability of decoupled translational and rotational motions, superseding the traditional multirotors' motion capability. Such maneuverability is achieved due to the ability of the omnidirectional multirotor to frequently alter the thrust amplitude and direction. In doing so, the rotors' settling time, which is induced by inherent rotor dynamics, significantly affects the omnidirectional multirotor's tracking performance, especially in aggressive flights. To resolve this issue, we propose a novel tracking controller that takes the rotor dynamics into account and does not require additional rotor state measurement. We prove that the proposed controller yields almost global exponential stability. The proposed controller is validated in experiments, where we demonstrate significantly improved tracking performance in multiple aggressive maneuvers compared with a baseline geometric PD controller.
Read more8/19/2024

0
Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
Peiyan Liu, Yuanzhe Shen, Yueqian Liu, Fengyu Quan, Can Wang, Haoyao Chen
As fully-actuated systems, omnidirectional multirotor aerial vehicles (OMAVs) have more flexible maneuverability and advantages in aggressive flight in cluttered environments than traditional underactuated MAVs. %Due to the high dimensionality of configuration space, making the designed trajectory generation algorithm efficient is challenging. This paper aims to achieve safe flight of OMAVs in cluttered environments. Considering existing static obstacles, an efficient optimization-based framework is proposed to generate 6-D $SE(3)$ trajectories for OMAVs. Given the kinodynamic constraints and the 3D collision-free region represented by a series of intersecting convex polyhedra, the proposed method finally generates a safe and dynamically feasible 6-D trajectory. First, we parameterize the vehicle's attitude into a free 3D vector using stereographic projection to eliminate the constraints inherent in the $SO(3)$ manifold, while the complete $SE(3)$ trajectory is represented as a 6-D polynomial in time without inherent constraints. The vehicle's shape is modeled as a cuboid attached to the body frame to achieve whole-body collision evaluation. Then, we formulate the origin trajectory generation problem as a constrained optimization problem. The original constrained problem is finally transformed into an unconstrained one that can be solved efficiently. To verify the proposed framework's performance, simulations and real-world experiments based on a tilt-rotor hexarotor aerial vehicle are carried out.
Read more7/16/2024

0
Flying a Quadrotor with Unknown Actuators and Sensor Configuration
Till M. Blaha, Ewoud J. J. Smeur, Bart D. W. Remes, Coen C. de Visser
Though control algorithms for multirotor Unmanned Air Vehicle (UAV) are well understood, the configuration, parameter estimation, and tuning of flight control algorithms takes quite some time and resources. In previous work, we have shown that it is possible to identify the control effectiveness and motor dynamics of a multirotor fast enough for it to recover to a stable hover after being thrown 4 meters in the air. In this paper, we extend this to include estimation of the position of the Inertial Measurement Unit (IMU) relative to the Center of Gravity (CoG), estimation of the IMU rotation, the thrust direction of all motors and the optimal combined thrust direction. In order to guarantee a correct IMU position estimation, two prior throw-and-catches of the vehicle with spin around different axes are required. For these throws, a height as low as 1 meter is sufficient. Quadrotor flight experimentation confirms the efficacy of the approach, and a simulation shows its applicability to fully-actuated crafts with multiple possible hover orientations.
Read more9/4/2024
0
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
Read more6/26/2024