Hologram: Realtime Holographic Overlays via LiDAR Augmented Reconstruction

0

Sign in to get full access
Overview
• This paper introduces a novel approach for creating real-time holographic overlays using LiDAR-based 3D reconstruction and deep learning. • The system, called "Hologram," combines LiDAR scanning, simultaneous localization and mapping (SLAM), and neural rendering to generate high-quality 3D holograms that can be seamlessly integrated into the user's environment. • The authors demonstrate Hologram's capabilities in various augmented reality (AR) applications, showcasing its potential for enhancing user experiences and enabling new forms of interaction.
Plain English Explanation
The paper presents a new way to create holograms that can be overlaid onto the real world in real-time. The system, called "Hologram," uses a technology called LiDAR to scan the 3D environment and build a detailed map of the surroundings. It then uses this map, along with advanced computer vision and deep learning techniques, to generate high-quality 3D holograms that can be seamlessly integrated into the user's view.
This means that users can see and interact with virtual objects, such as 3D models or animated characters, that appear to be part of the physical world around them. The authors demonstrate how Hologram can be used in various augmented reality applications, such as gaming, education, and entertainment, to create more immersive and engaging experiences.
The key advantage of Hologram is its ability to create realistic-looking holograms that are accurately positioned and scaled in the user's environment, thanks to the LiDAR-based 3D reconstruction. This overcomes the limitations of traditional augmented reality approaches, which often struggle to properly integrate virtual content with the real world.
Technical Explanation
The Hologram system combines several core technologies to enable real-time holographic overlays:
-
LiDAR-based 3D Reconstruction: The system uses a LiDAR sensor to capture a detailed 3D map of the environment. This provides accurate depth information that is crucial for properly positioning and scaling the holographic content.
-
SLAM-based Localization: Simultaneous localization and mapping (SLAM) algorithms are used to track the user's position and orientation within the 3D environment, allowing the holograms to be aligned with the user's perspective.
-
Neural Rendering: A deep learning-based neural rendering approach is employed to generate high-quality, photorealistic 3D holograms that seamlessly blend with the real-world surroundings. This goes beyond simple plane-based augmented reality overlays.
The authors evaluate the Hologram system in various AR scenarios, demonstrating its ability to create compelling holographic experiences that adapt to the user's environment. They also discuss the technical challenges and design considerations involved in developing such a system.
Critical Analysis
The Hologram system represents a significant advancement in the field of augmented reality, addressing some of the key limitations of existing approaches. By leveraging LiDAR and SLAM technologies, the system is able to create holograms that are accurately positioned and scaled within the user's environment, providing a more immersive and natural experience.
However, the paper does not fully explore the potential limitations and trade-offs of the Hologram system. For example, the authors do not discuss the computational requirements or power consumption of the system, which may be a concern for mobile or resource-constrained devices. Additionally, the paper does not address potential privacy or safety concerns that may arise from the use of LiDAR sensors and 3D mapping in public spaces.
Further research is needed to investigate the long-term reliability and robustness of the Hologram system, as well as its broader societal implications. Ongoing developments in related fields, such as semi-automatic infrared calibration for augmented reality systems, 3D reconstruction via single-view neural radiance fields, and neural radiance fields-based holography, may also provide valuable insights and opportunities for integration with the Hologram approach.
Conclusion
The Hologram system represents a significant advancement in the field of augmented reality, enabling the creation of high-quality, real-time holographic overlays that are seamlessly integrated into the user's environment. By combining LiDAR-based 3D reconstruction, SLAM-based localization, and neural rendering, the system overcomes many of the limitations of traditional AR approaches, paving the way for more immersive and engaging user experiences.
While the paper highlights the technical merits of the Hologram system, further research is needed to address potential limitations and explore the broader societal implications of this technology. Nonetheless, the authors have made a compelling contribution to the ongoing efforts to develop advanced augmented reality systems and applications that can transform how we interact with and perceive the world around us.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hologram: Realtime Holographic Overlays via LiDAR Augmented Reconstruction
Ekansh Agrawal
Guided by the hologram technology of the infamous Star Wars franchise, I present an application that creates real-time holographic overlays using LiDAR augmented 3D reconstruction. Prior attempts involve SLAM or NeRFs which either require highly calibrated scenes, incur steep computation costs, or fail to render dynamic scenes. I propose 3 high-fidelity reconstruction tools that can run on a portable device, such as a iPhone 14 Pro, which can allow for metric accurate facial reconstructions. My systems enable interactive and immersive holographic experiences that can be used for a wide range of applications, including augmented reality, telepresence, and entertainment.
Read more5/14/2024
0
Augmented Conversation with Embedded Speech-Driven On-the-Fly Referencing in AR
Shivesh Jadon, Mehrad Faridan, Edward Mah, Rajan Vaish, Wesley Willett, Ryo Suzuki
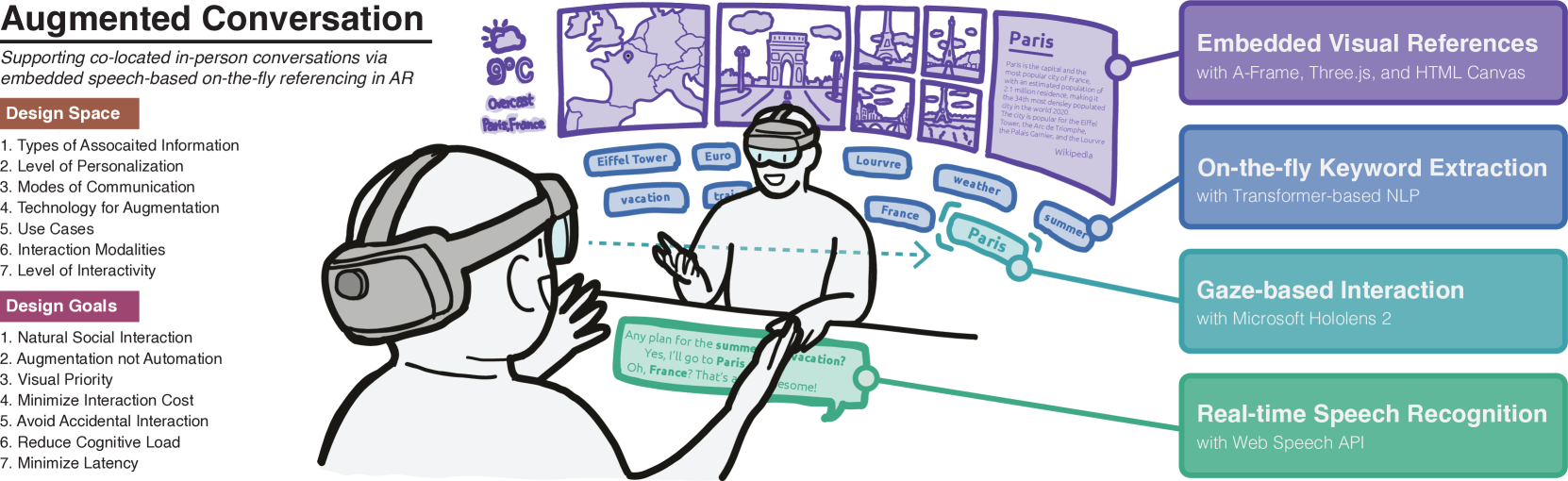
This paper introduces the concept of augmented conversation, which aims to support co-located in-person conversations via embedded speech-driven on-the-fly referencing in augmented reality (AR). Today computing technologies like smartphones allow quick access to a variety of references during the conversation. However, these tools often create distractions, reducing eye contact and forcing users to focus their attention on phone screens and manually enter keywords to access relevant information. In contrast, AR-based on-the-fly referencing provides relevant visual references in real-time, based on keywords extracted automatically from the spoken conversation. By embedding these visual references in AR around the conversation partner, augmented conversation reduces distraction and friction, allowing users to maintain eye contact and supporting more natural social interactions. To demonstrate this concept, we developed system, a Hololens-based interface that leverages real-time speech recognition, natural language processing and gaze-based interactions for on-the-fly embedded visual referencing. In this paper, we explore the design space of visual referencing for conversations, and describe our our implementation -- building on seven design guidelines identified through a user-centered design process. An initial user study confirms that our system decreases distraction and friction in conversations compared to smartphone searches, while providing highly useful and relevant information.
Read more5/30/2024
↗️
0
Semi-Automatic Infrared Calibration for Augmented Reality Systems in Surgery
Hisham Iqbal, Ferdinando Rodriguez y Baena
Augmented reality (AR) has the potential to improve the immersion and efficiency of computer-assisted orthopaedic surgery (CAOS) by allowing surgeons to maintain focus on the operating site rather than external displays in the operating theatre. Successful deployment of AR to CAOS requires a calibration that can accurately calculate the spatial relationship between real and holographic objects. Several studies attempt this calibration through manual alignment or with additional fiducial markers in the surgical scene. We propose a calibration system that offers a direct method for the calibration of AR head-mounted displays (HMDs) with CAOS systems, by using infrared-reflective marker-arrays widely used in CAOS. In our fast, user-agnostic setup, a HoloLens 2 detected the pose of marker arrays using infrared response and time-of-flight depth obtained through sensors onboard the HMD. Registration with a commercially available CAOS system was achieved when an IR marker-array was visible to both devices. Study tests found relative-tracking mean errors of 2.03 mm and 1.12{deg} when calculating the relative pose between two static marker-arrays at short ranges. When using the calibration result to provide in-situ holographic guidance for a simulated wire-insertion task, a pre-clinical test reported mean errors of 2.07 mm and 1.54{deg} when compared to a pre-planned trajectory.
Read more5/6/2024
0
PlatoNeRF: 3D Reconstruction in Plato's Cave via Single-View Two-Bounce Lidar
Tzofi Klinghoffer, Xiaoyu Xiang, Siddharth Somasundaram, Yuchen Fan, Christian Richardt, Ramesh Raskar, Rakesh Ranjan
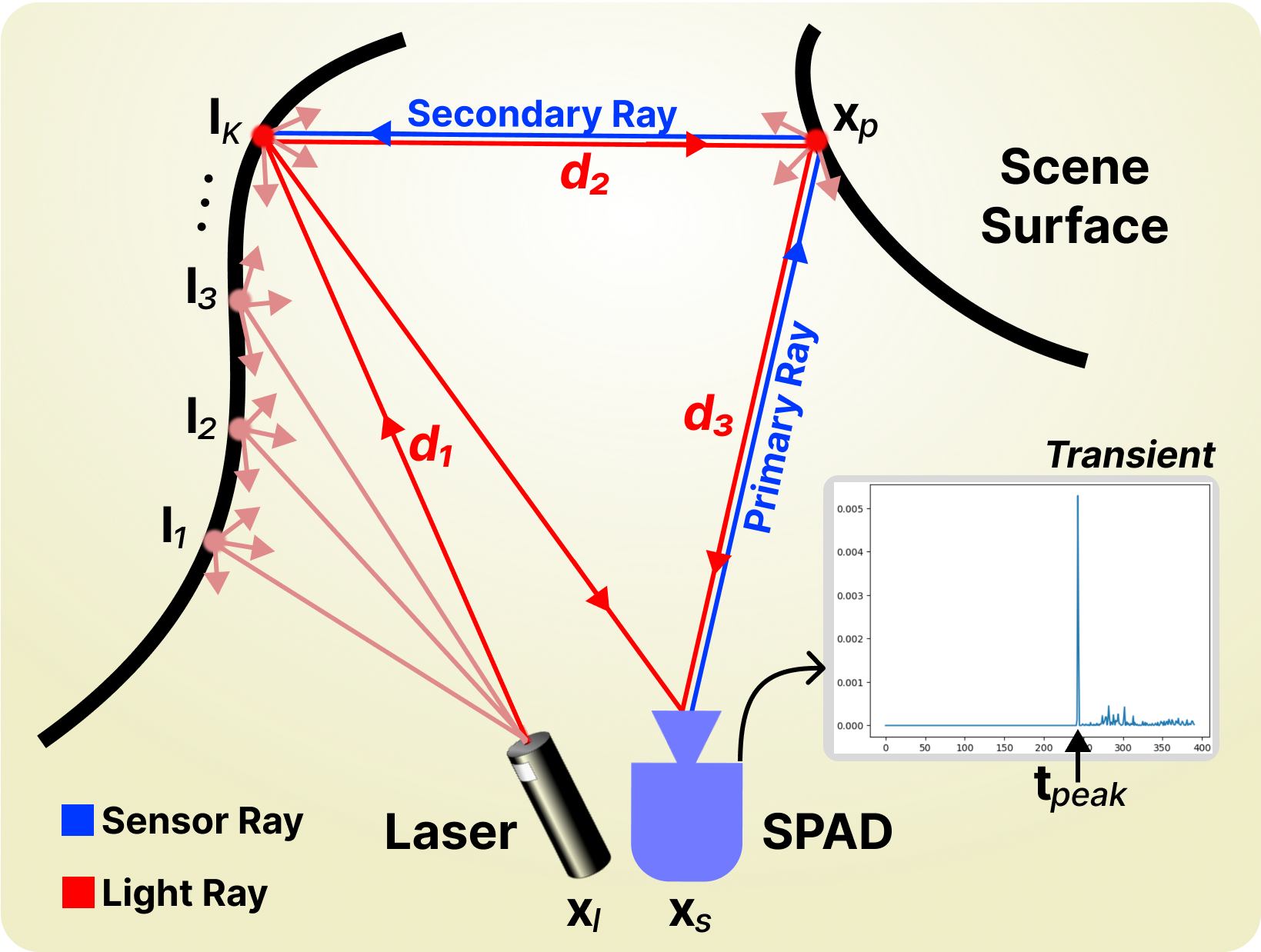
3D reconstruction from a single-view is challenging because of the ambiguity from monocular cues and lack of information about occluded regions. Neural radiance fields (NeRF), while popular for view synthesis and 3D reconstruction, are typically reliant on multi-view images. Existing methods for single-view 3D reconstruction with NeRF rely on either data priors to hallucinate views of occluded regions, which may not be physically accurate, or shadows observed by RGB cameras, which are difficult to detect in ambient light and low albedo backgrounds. We propose using time-of-flight data captured by a single-photon avalanche diode to overcome these limitations. Our method models two-bounce optical paths with NeRF, using lidar transient data for supervision. By leveraging the advantages of both NeRF and two-bounce light measured by lidar, we demonstrate that we can reconstruct visible and occluded geometry without data priors or reliance on controlled ambient lighting or scene albedo. In addition, we demonstrate improved generalization under practical constraints on sensor spatial- and temporal-resolution. We believe our method is a promising direction as single-photon lidars become ubiquitous on consumer devices, such as phones, tablets, and headsets.
Read more4/8/2024