Homotopy-Aware Multi-Agent Path Planning in Plane
2310.01945
0
0

Abstract
We propose an efficient framework using the Dynnikov coordinates for homotopy-aware multi-agent path planning in the plane. We developed a method to generate multiple homotopically distinct solutions of multi-agent path planning problem in the plane by combining our framework with revised prioritized planning and proved its completeness in the grid world under specific assumptions. Experimentally, we demonstrated the scalability of our method for the number of agents. We also confirmed experimentally that homotopy-aware planning contributes to avoiding locally optimal solutions when searching for low-cost trajectories for a swarm of agents in a continuous environment.
Create account to get full access
Overview
- Proposes a homotopy-aware approach for multi-agent path planning in a plane
- Addresses challenges in finding collision-free paths for multiple agents while considering their topological relationships
- Introduces a novel algorithm that can efficiently compute homotopic paths for multiple agents
Plain English Explanation
The paper presents a method for planning paths for multiple agents, such as robots or vehicles, in a shared 2D environment. The key challenge is to find collision-free paths for all agents while also considering their "topological" relationships - that is, how the paths of the agents are intertwined or "linked" with each other.
Imagine you have a group of robots navigating through a room with obstacles. The robots need to find paths to their destinations without colliding with each other or the obstacles. But it's not enough to just find any paths - the paths need to be "homotopic," meaning they can be continuously deformed into each other without intersecting. This is important because paths that are not homotopic may become "tangled" and difficult to execute in practice.
The proposed approach addresses this problem by incorporating homotopy awareness into the path planning process. The algorithm can efficiently compute homotopic paths for all agents, ensuring that their movements are coordinated and efficient. This can be useful in a variety of applications, such as autonomous vehicle navigation, drone swarm coordination, and warehouse robot management.
Technical Explanation
The paper introduces a homotopy-aware multi-agent path planning algorithm for a 2D plane. The algorithm works by first constructing a roadmap of the environment, which represents the possible paths for the agents. It then computes homotopic paths for each agent by considering the topological relationships between the paths.
The key innovation is the use of a "homotopy graph" to represent these topological relationships. The homotopy graph captures how the paths of the agents are linked or "knotted" with each other, and the algorithm uses this information to find collision-free paths that are also homotopically consistent.
The algorithm is evaluated through simulation experiments and real-world demonstrations, showing its effectiveness in computing efficient, homotopy-aware paths for multiple agents.
Critical Analysis
The paper presents a novel and promising approach to multi-agent path planning, addressing the important challenge of ensuring that the computed paths are not only collision-free but also homotopically consistent. This is a valuable property, as it can help prevent the agents from becoming "tangled" in their movements and simplify the execution of the planned paths.
One potential limitation of the approach is that it assumes a 2D environment, which may not always be the case in real-world applications. Extending the method to 3D environments could be an area for future research. Additionally, the paper does not explore the computational complexity of the algorithm, which could be an important consideration for large-scale problems or real-time applications.
Overall, the research presented in this paper is a significant contribution to the field of multi-agent path planning, and the homotopy-aware approach could be a valuable tool in a variety of robotics and autonomous systems applications.
Conclusion
This paper proposes a homotopy-aware approach for multi-agent path planning in a 2D plane. The key innovation is the use of a homotopy graph to capture the topological relationships between the paths of the agents, which allows the algorithm to find collision-free paths that are also homotopically consistent.
The experiments demonstrate the effectiveness of the proposed method, and the homotopy-aware path planning approach could have important implications for a range of applications, from autonomous vehicle navigation to drone swarm coordination and warehouse robot management. While the current implementation is limited to 2D environments, future research could explore extending the approach to 3D spaces and addressing computational complexity challenges.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Homotopic Path Set Planning for Robot Manipulation and Navigation
Jing Huang, Yunxi Tang, Kwok Wai Samuel Au
0
0
This paper addresses path set planning that yields important applications in robot manipulation and navigation such as path generation for deformable object keypoints and swarms. A path set refers to the collection of finite agent paths to represent the overall spatial path of a group of keypoints or a swarm, whose collective properties meet spatial and topological constraints. As opposed to planning a single path, simultaneously planning multiple paths with constraints poses nontrivial challenges in complex environments. This paper presents a systematic planning pipeline for homotopic path sets, a widely applicable path set class in robotics. An extended visibility check condition is first proposed to attain a sparse passage distribution amidst dense obstacles. Passage-aware optimal path planning compatible with sampling-based planners is then designed for single path planning with adjustable costs. Large accessible free space for path set accommodation can be achieved by the planned path while having a sufficiently short path length. After specifying the homotopic properties of path sets, path set generation based on deformable path transfer is proposed in an efficient centralized manner. The effectiveness of these methods is validated by extensive simulated and experimental results.
6/6/2024
📉
Tactical Game-theoretic Decision-making with Homotopy Class Constraints
Michael Khayyat, Alessandro Zanardi, Stefano Arrigoni, Francesco Braghin
0
0
We propose a tactical homotopy-aware decision-making framework for game-theoretic motion planning in urban environments. We model urban driving as a generalized Nash equilibrium problem and employ a mixed-integer approach to tame the combinatorial aspect of motion planning. More specifically, by utilizing homotopy classes, we partition the high-dimensional solution space into finite, well-defined subregions. Each subregion (homotopy) corresponds to a high-level tactical decision, such as the passing order between pairs of players. The proposed formulation allows to find global optimal Nash equilibria in a computationally tractable manner by solving a mixed-integer quadratic program. Each homotopy decision is represented by a binary variable that activates different sets of linear collision avoidance constraints. This extra homotopic constraint allows to find solutions in a more efficient way (on a roundabout scenario on average 5-times faster). We experimentally validate the proposed approach on scenarios taken from the rounD dataset. Simulation-based testing in receding horizon fashion demonstrates the capability of the framework in achieving globally optimal solutions while yielding a 78% average decrease in the computational time with respect to an implementation without the homotopic constraints.
6/21/2024
Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
Martina Stadler Kurtz, Samuel Prentice, Yasmin Veys, Long Quang, Carlos Nieto-Granda, Michael Novitzky, Ethan Stump, Nicholas Roy
0
0
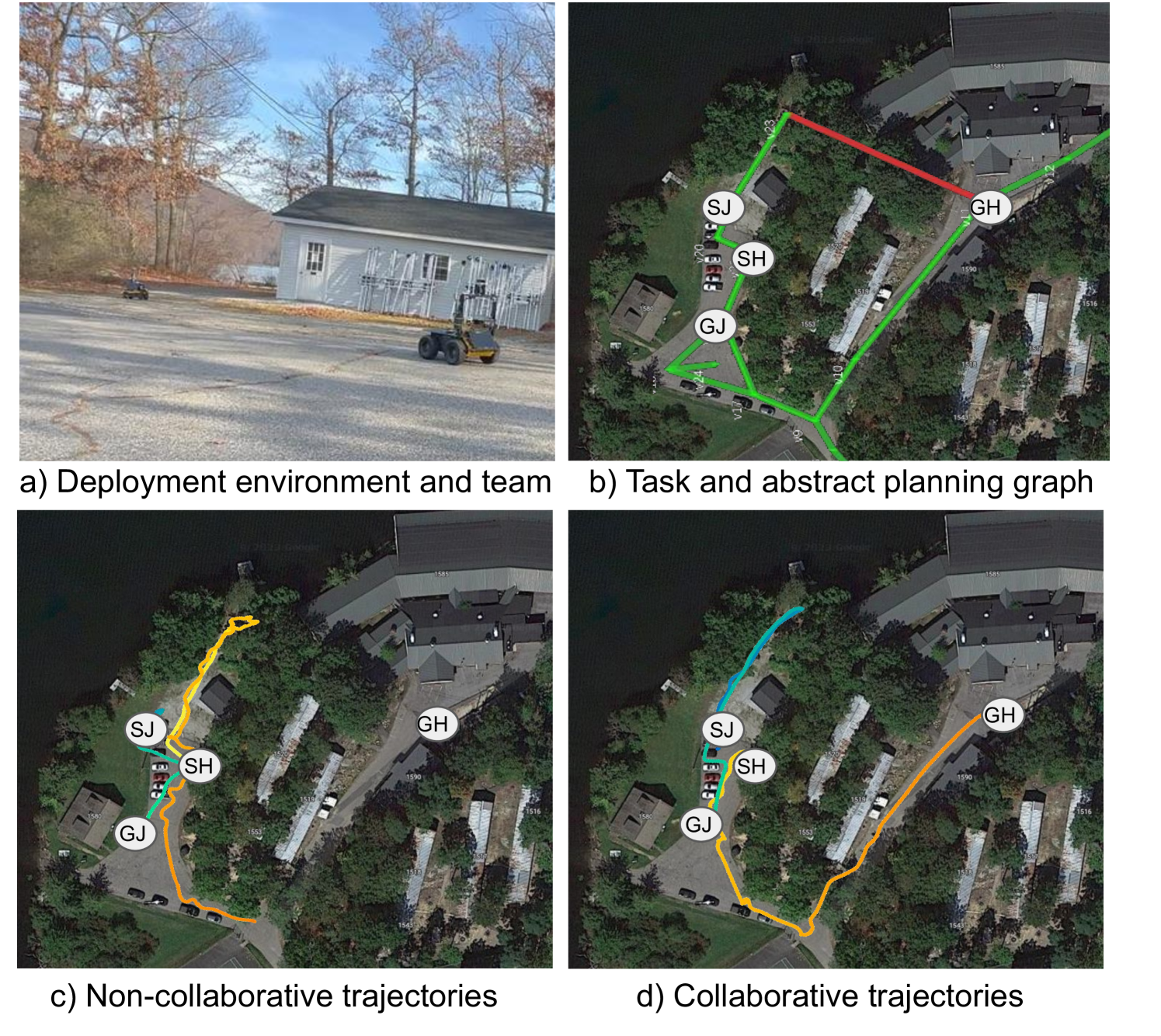
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
4/29/2024
📉
Optimal Multilayered Motion Planning for Multiple Differential Drive Mobile Robots with Hierarchical Prioritization (OM-MP)
Zong Chen, Songyuan Fa, Yiqun Li
0
0
We present a novel framework for addressing the challenges of multi-Agent planning and formation control within intricate and dynamic environments. This framework transforms the Multi-Agent Path Finding (MAPF) problem into a Multi-Agent Trajectory Planning (MATP) problem. Unlike traditional MAPF solutions, our multilayer optimization scheme consists of a global planner optimization solver, which is dedicated to determining concise global paths for each individual robot, and a local planner with an embedded optimization solver aimed at ensuring the feasibility of local robot trajectories. By implementing a hierarchical prioritization strategy, we enhance robots' efficiency and approximate the global optimal solution. Specifically, within the global planner, we employ the Augmented Graph Search (AGS) algorithm, which significantly improves the speed of solutions. Meanwhile, within the local planner optimization solver, we utilize Control Barrier functions (CBFs) and introduced an oblique cylindrical obstacle bounding box based on the time axis for obstacle avoidance and construct a single-robot locally aware-communication circle to ensure the simplicity, speed, and accuracy of locally optimized solutions. Additionally, we integrate the weight and priority of path traces to prevent deadlocks in limiting scenarios. Compared to the other state-of-the-art methods, including CBS, ECBS and other derivative algorithms, our proposed method demonstrates superior performance in terms of capacity, flexible scalability and overall task optimality in theory, as validated through simulations and experiments.
5/14/2024