Human-Cobot collaboration's impact on success, time completion, errors, workload, gestures and acceptability during an assembly task

0

Sign in to get full access
Overview
- This paper explores the impact of human-cobot (collaborative robot) collaboration on various factors during an assembly task, including success, time completion, errors, workload, gestures, and acceptability.
- The researchers conducted an experiment where participants completed an assembly task either alone or in collaboration with a cobot.
- Key metrics such as task completion, error rates, workload, and user perceptions were measured and compared between the two conditions.
Plain English Explanation
The researchers wanted to understand how working together with a robot, called a cobot, affected people's ability to complete an assembly task. They had participants try the task both on their own and with the help of the cobot. They measured things like whether the task was completed successfully, how long it took, how many mistakes were made, how much effort it required, what kinds of hand movements were used, and how acceptable or comfortable the experience was.
The key idea behind human-robot collaboration is that robots can assist and work alongside humans to improve productivity and efficiency. By understanding how this collaboration affects different outcomes, the researchers aimed to provide insights that could help design better human-robot teamwork in the future.
Technical Explanation
The experiment involved participants completing an assembly task in one of two conditions: working alone or working collaboratively with a cobot. In the collaborative condition, the cobot was programmed to provide assistance by handing the participant the necessary components and guiding their hand movements.
The researchers measured several outcomes to compare the two conditions:
- Task success rate and completion time
- Number of errors made
- Subjective workload assessed using the NASA-TLX questionnaire
- Characteristic hand gestures used during the task
- Perceived acceptability of the cobot's assistance
The results showed that collaboration with the cobot led to higher task success rates, shorter completion times, fewer errors, and lower perceived workload compared to working alone. Participants also used more pointing and guiding gestures when working with the cobot. Overall, the cobot's assistance was found to be highly acceptable by the participants.
Critical Analysis
The paper provides a thorough and well-designed experiment to evaluate the impacts of human-cobot collaboration on various performance and user experience factors. The use of established metrics like the NASA-TLX workload assessment and the analysis of hand gestures add depth to the evaluation.
However, the study is limited to a single, relatively simple assembly task. Further research would be needed to understand how the findings generalize to more complex tasks or different types of human-robot interactions. Additionally, the study does not delve into the specific mechanisms or strategies employed by the cobot to provide assistance, which could offer additional insights.
Future work could explore ways to capture more detailed motion and tactile data to better understand the physical and cognitive aspects of the human-cobot collaboration. Investigating longer-term effects and user acceptance over time would also be valuable.
Conclusion
This study provides evidence that collaborative robots can significantly enhance human performance and user experience in assembly tasks. The improved success rates, reduced errors, lower perceived workload, and high acceptability of the cobot's assistance suggest that human-cobot collaboration has the potential to improve productivity and worker satisfaction in various industrial and manufacturing settings.
As robots become more advanced and capable of seamless integration with human workers, this type of research will be crucial in guiding the design and deployment of collaborative robot systems that can effectively augment and empower human capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Human-Cobot collaboration's impact on success, time completion, errors, workload, gestures and acceptability during an assembly task
'Etienne Fournier, Christine Jeoffrion, Belal Hmedan, Damien Pellier, Humbert Fiorino, Aur'elie Landry
The 5.0 industry promotes collaborative robots (cobots). This research studies the impacts of cobot collaboration using an experimental setup. 120 participants realized a simple and a complex assembly task. 50% collaborated with another human (H/H) and 50% with a cobot (H/C). The workload and the acceptability of the cobotic collaboration were measured. Working with a cobot decreases the effect of the task complexity on the human workload and on the output quality. However, it increases the time completion and the number of gestures (while decreasing their frequency). The H/C couples have a higher chance of success but they take more time and more gestures to realize the task. The results of this research could help developers and stakeholders to understand the impacts of implementing a cobot in production chains.
Read more5/29/2024
🔮
0
A Concept for User-Centered Delegation of Abstract High-Level Tasks to Cobots for Flexible Lot Sizes
Moritz Schmidt, Claudia Meitinger
Technical advances in collaborative robots (cobots) are making them increasingly attractive to companies. However, many human operators are not trained to program complex machines. Instead, humans are used to communicating with each other on a task-based level rather than through specific instructions, as is common with machines. The gap between low-level instruction-based and high-level task-based communication leads to low values for usability scores of teach pendant programming. As a solution, we propose a task-based interaction concept that allows human operators to delegate a complex task to a machine without programming by specifying a task via triplets. The concept is based on task decomposition and a reasoning system using a cognitive architecture. The approach is evaluated in an industrial use case where mineral cast basins have to be sanded by a cobot in a crafts enterprise.
Read more6/10/2024
0
Enhancing Human-Robot Collaborative Assembly in Manufacturing Systems Using Large Language Models
Jonghan Lim, Sujani Patel, Alex Evans, John Pimley, Yifei Li, Ilya Kovalenko
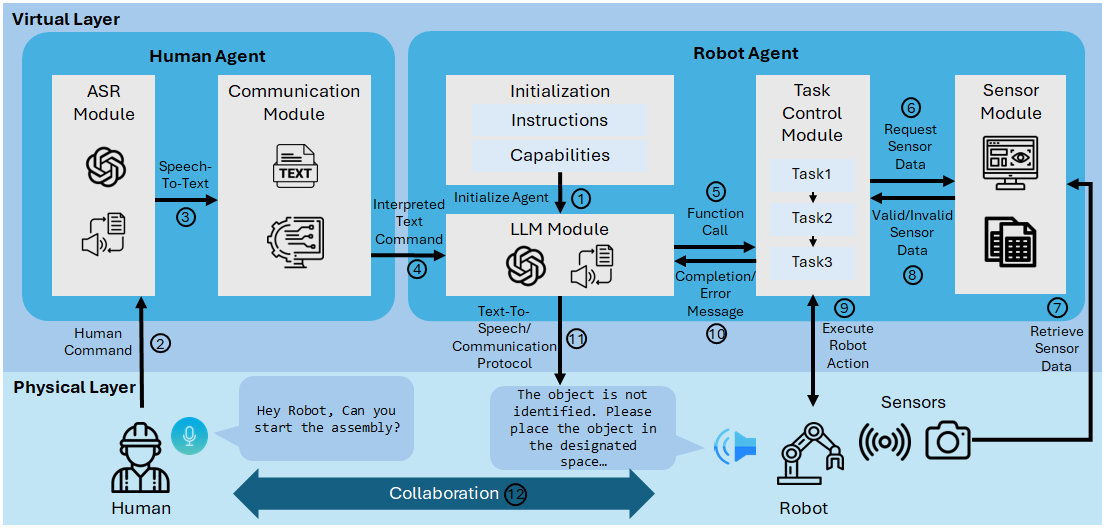
The development of human-robot collaboration has the ability to improve manufacturing system performance by leveraging the unique strengths of both humans and robots. On the shop floor, human operators contribute with their adaptability and flexibility in dynamic situations, while robots provide precision and the ability to perform repetitive tasks. However, the communication gap between human operators and robots limits the collaboration and coordination of human-robot teams in manufacturing systems. Our research presents a human-robot collaborative assembly framework that utilizes a large language model for enhancing communication in manufacturing environments. The framework facilitates human-robot communication by integrating voice commands through natural language for task management. A case study for an assembly task demonstrates the framework's ability to process natural language inputs and address real-time assembly challenges, emphasizing adaptability to language variation and efficiency in error resolution. The results suggest that large language models have the potential to improve human-robot interaction for collaborative manufacturing assembly applications.
Read more6/24/2024

0
The Critical Role of Effective Communication in Human-Robot Collaborative Assembly
Davide Ferrari, Cristian Secchi
In the rapidly evolving landscape of Human-Robot Collaboration (HRC), effective communication between humans and robots is crucial for complex task execution. Traditional request-response systems often lack naturalness and may hinder efficiency. This study emphasizes the importance of adopting human-like communication interactions to enable fluent vocal communication between human operators and robots simulating a collaborative human-robot industrial assembly. We propose a novel approach that employs human-like interactions through natural dialogue, enabling human operators to engage in vocal conversations with robots. Through a comparative experiment, we demonstrate the efficacy of our approach in enhancing task performance and collaboration efficiency. The robot's ability to engage in meaningful vocal conversations enables it to seek clarification, provide status updates, and ask for assistance when required, leading to improved coordination and a smoother workflow. The results indicate that the adoption of human-like conversational interactions positively influences the human-robot collaborative dynamic. Human operators find it easier to convey complex instructions and preferences, resulting in a more productive and satisfying collaboration experience.
Read more9/12/2024