HVOFusion: Incremental Mesh Reconstruction Using Hybrid Voxel Octree
2404.17974
0
0
Abstract
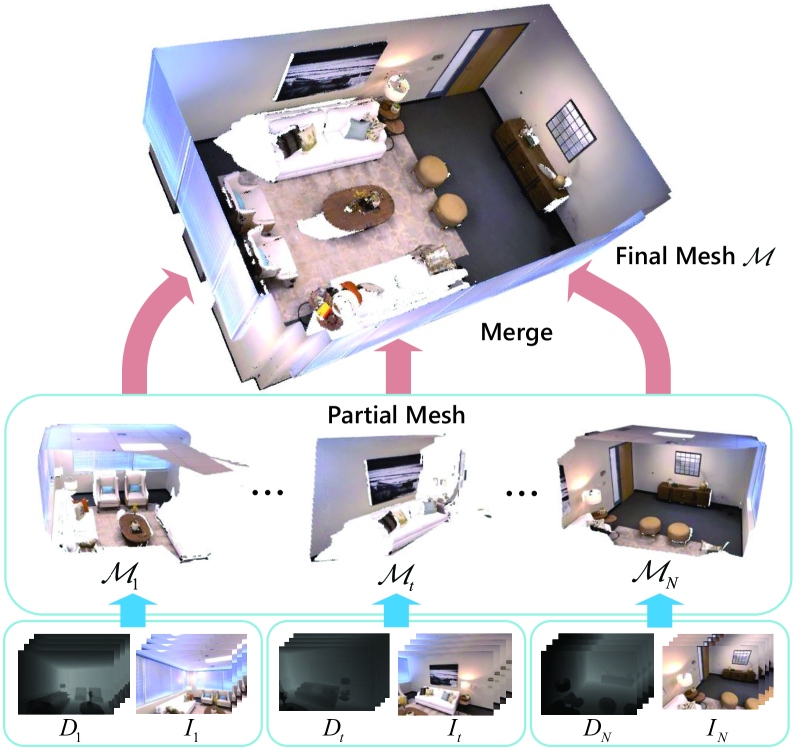
Incremental scene reconstruction is essential to the navigation in robotics. Most of the conventional methods typically make use of either TSDF (truncated signed distance functions) volume or neural networks to implicitly represent the surface. Due to the voxel representation or involving with time-consuming sampling, they have difficulty in balancing speed, memory storage, and surface quality. In this paper, we propose a novel hybrid voxel-octree approach to effectively fuse octree with voxel structures so that we can take advantage of both implicit surface and explicit triangular mesh representation. Such sparse structure preserves triangular faces in the leaf nodes and produces partial meshes sequentially for incremental reconstruction. This storage scheme allows us to naturally optimize the mesh in explicit 3D space to achieve higher surface quality. We iteratively deform the mesh towards the target and recovers vertex colors by optimizing a shading model. Experimental results on several datasets show that our proposed approach is capable of quickly and accurately reconstructing a scene with realistic colors.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper introduces HVOFusion, an incremental mesh reconstruction method that uses a hybrid voxel octree data structure.
- The proposed approach aims to efficiently capture the geometric details of 3D objects by combining the advantages of voxel and octree representations.
- HVOFusion incrementally updates the mesh as new data is acquired, enabling real-time performance and memory efficiency.
Plain English Explanation
HVOFusion is a new technique for creating 3D models from sensor data, such as from a camera or laser scanner. It works by combining two common ways of representing 3D data - voxels (small 3D cubes) and octrees (a tree-like data structure).
The key idea is to use voxels to capture fine details, while using the octree to efficiently store and update the 3D model as new data comes in. This allows the system to create high-quality 3D models in real-time, without using too much computer memory.
To understand this better, imagine you're building a 3D model of a house. The voxels would be like small bricks, allowing you to capture intricate details like the bricks on the walls or the shingles on the roof. The octree would be like a hierarchy that organizes the bricks efficiently, so you can quickly update the model as you gather new information about the house.
This hybrid approach aims to take advantage of the strengths of both voxels and octrees, enabling fast, memory-efficient 3D reconstruction that can be updated continuously as new sensor data comes in. This could be useful for applications like robotic navigation, augmented reality, or 3D scanning.
Technical Explanation
HVOFusion uses a hybrid voxel octree data structure to represent the 3D scene. This data structure is similar to approaches used in papers like LightOctree and Autonomous Implicit Indoor Scene Reconstruction, which combine voxels and octrees for efficient 3D modeling.
The voxel representation captures fine geometric details, while the octree hierarchy enables compact storage and efficient updates as new sensor data is acquired. HVOFusion incrementally updates the mesh by merging new observations into the existing octree structure.
The paper evaluates HVOFusion on various 3D reconstruction benchmarks, comparing it to state-of-the-art methods like Learning Topology-Uniform Face Mesh and InstantAvatar. The results demonstrate that HVOFusion can achieve high-quality reconstruction with lower memory footprint and faster update rates.
Critical Analysis
The paper provides a thorough evaluation of HVOFusion and highlights its strengths compared to other 3D reconstruction approaches. However, the authors do not discuss potential limitations or edge cases where the method may struggle.
For example, it's unclear how HVOFusion would perform with highly complex, detailed scenes or in the presence of significant sensor noise or occlusions. The authors also do not explore the trade-offs between voxel resolution, octree depth, and reconstruction quality/efficiency.
Further research could investigate these aspects to better understand the practical limitations and optimal configurations of the HVOFusion approach. Additionally, exploring applications beyond 3D reconstruction, such as efficient neural implicit surface reconstruction, could uncover new use cases and challenges.
Conclusion
In summary, HVOFusion is a novel 3D reconstruction method that combines the strengths of voxel and octree representations to enable high-quality, memory-efficient, and real-time mesh updates. The hybrid data structure and incremental update approach show promising results, suggesting this technique could be valuable for a range of 3D sensing and modeling applications. Further research to address potential limitations and explore new use cases could help advance the field of 3D reconstruction and scene understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤷
InstantAvatar: Efficient 3D Head Reconstruction via Surface Rendering
Antonio Canela, Pol Caselles, Ibrar Malik, Eduard Ramon, Jaime Garc'ia, Jordi S'anchez-Riera, Gil Triginer, Francesc Moreno-Noguer
0
0
Recent advances in full-head reconstruction have been obtained by optimizing a neural field through differentiable surface or volume rendering to represent a single scene. While these techniques achieve an unprecedented accuracy, they take several minutes, or even hours, due to the expensive optimization process required. In this work, we introduce InstantAvatar, a method that recovers full-head avatars from few images (down to just one) in a few seconds on commodity hardware. In order to speed up the reconstruction process, we propose a system that combines, for the first time, a voxel-grid neural field representation with a surface renderer. Notably, a naive combination of these two techniques leads to unstable optimizations that do not converge to valid solutions. In order to overcome this limitation, we present a novel statistical model that learns a prior distribution over 3D head signed distance functions using a voxel-grid based architecture. The use of this prior model, in combination with other design choices, results into a system that achieves 3D head reconstructions with comparable accuracy as the state-of-the-art with a 100x speed-up.
4/8/2024
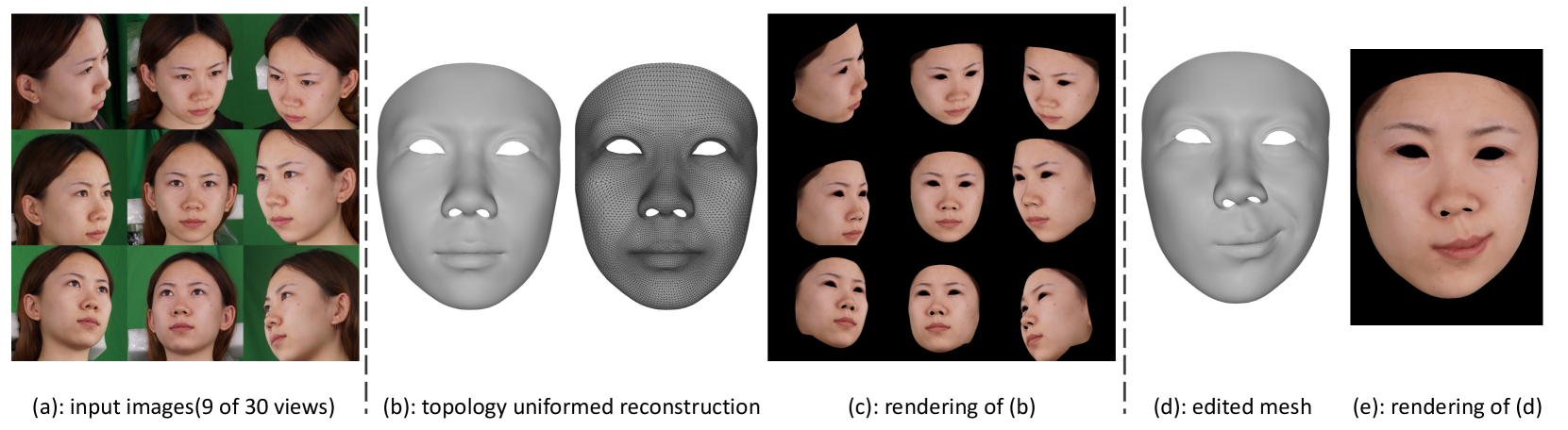
Learning Topology Uniformed Face Mesh by Volume Rendering for Multi-view Reconstruction
Yating Wang, Ran Yi, Ke Fan, Jinkun Hao, Jiangbo Lu, Lizhuang Ma
0
0
Face meshes in consistent topology serve as the foundation for many face-related applications, such as 3DMM constrained face reconstruction and expression retargeting. Traditional methods commonly acquire topology uniformed face meshes by two separate steps: multi-view stereo (MVS) to reconstruct shapes followed by non-rigid registration to align topology, but struggles with handling noise and non-lambertian surfaces. Recently neural volume rendering techniques have been rapidly evolved and shown great advantages in 3D reconstruction or novel view synthesis. Our goal is to leverage the superiority of neural volume rendering into multi-view reconstruction of face mesh with consistent topology. We propose a mesh volume rendering method that enables directly optimizing mesh geometry while preserving topology, and learning implicit features to model complex facial appearance from multi-view images. The key innovation lies in spreading sparse mesh features into the surrounding space to simulate radiance field required for volume rendering, which facilitates backpropagation of gradients from images to mesh geometry and implicit appearance features. Our proposed feature spreading module exhibits deformation invariance, enabling photorealistic rendering seamlessly after mesh editing. We conduct experiments on multi-view face image dataset to evaluate the reconstruction and implement an application for photorealistic rendering of animated face mesh.
4/9/2024
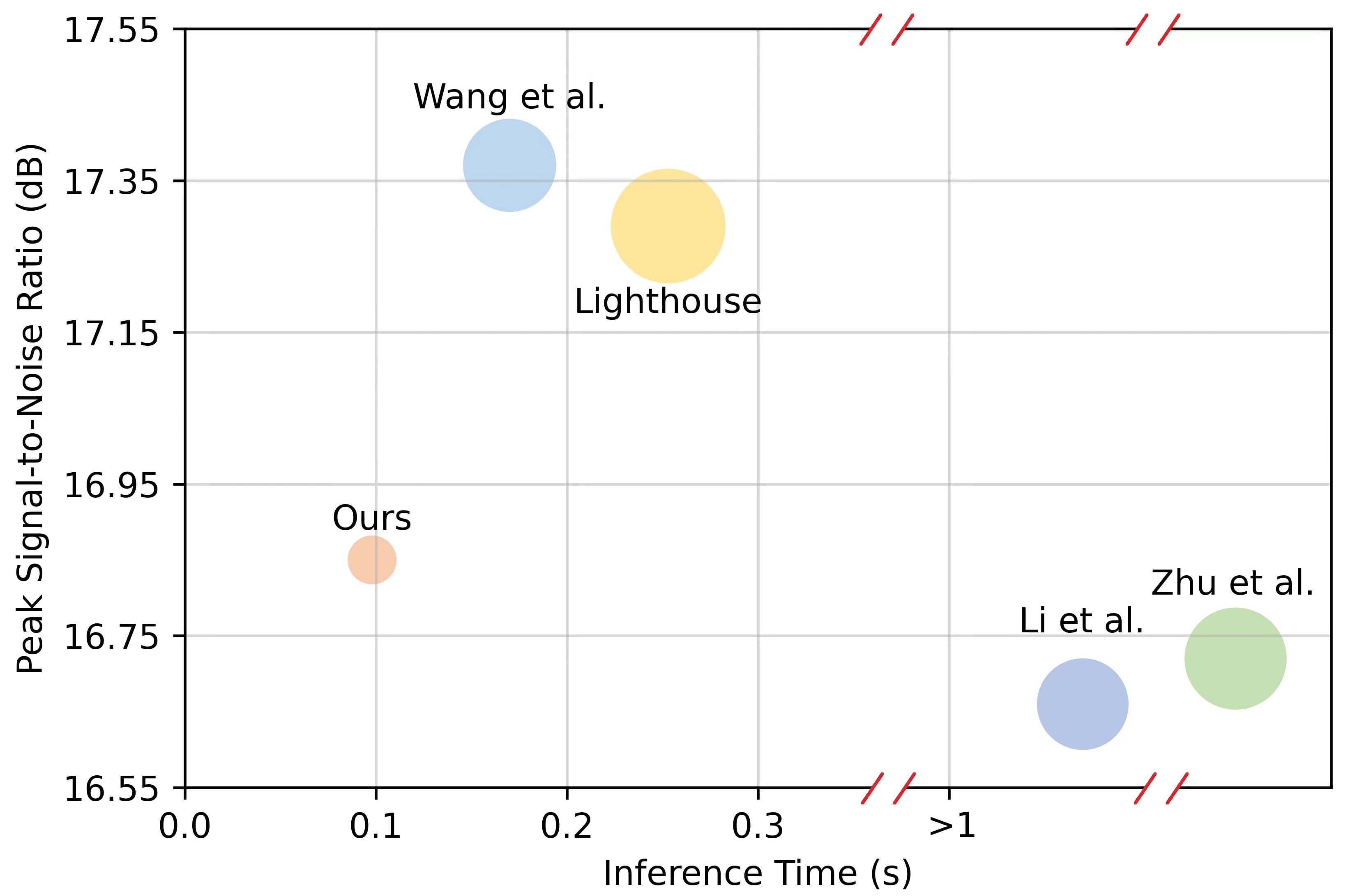
LightOctree: Lightweight 3D Spatially-Coherent Indoor Lighting Estimation
Xuecan Wang, Shibang Xiao, Xiaohui Liang
0
0
We present a lightweight solution for estimating spatially-coherent indoor lighting from a single RGB image. Previous methods for estimating illumination using volumetric representations have overlooked the sparse distribution of light sources in space, necessitating substantial memory and computational resources for achieving high-quality results. We introduce a unified, voxel octree-based illumination estimation framework to produce 3D spatially-coherent lighting. Additionally, a differentiable voxel octree cone tracing rendering layer is proposed to eliminate regular volumetric representation throughout the entire process and ensure the retention of features across different frequency domains. This reduction significantly decreases spatial usage and required floating-point operations without substantially compromising precision. Experimental results demonstrate that our approach achieves high-quality coherent estimation with minimal cost compared to previous methods.
4/8/2024
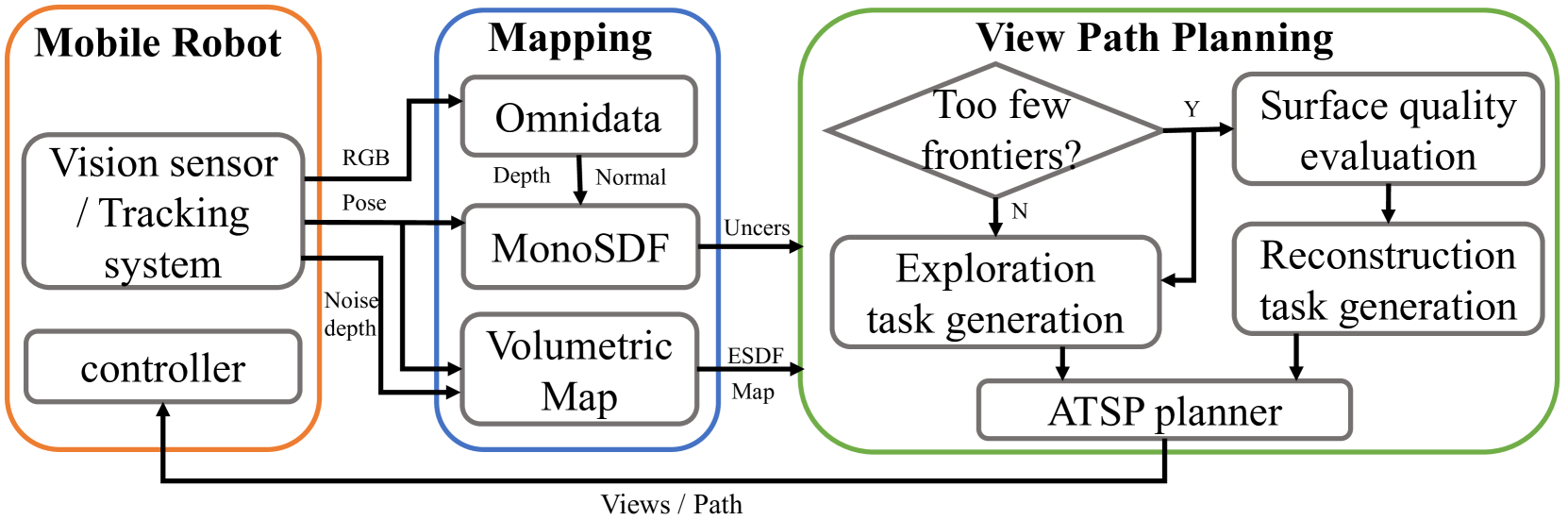
Autonomous Implicit Indoor Scene Reconstruction with Frontier Exploration
Jing Zeng, Yanxu Li, Jiahao Sun, Qi Ye, Yunlong Ran, Jiming Chen
0
0
Implicit neural representations have demonstrated significant promise for 3D scene reconstruction. Recent works have extended their applications to autonomous implicit reconstruction through the Next Best View (NBV) based method. However, the NBV method cannot guarantee complete scene coverage and often necessitates extensive viewpoint sampling, particularly in complex scenes. In the paper, we propose to 1) incorporate frontier-based exploration tasks for global coverage with implicit surface uncertainty-based reconstruction tasks to achieve high-quality reconstruction. and 2) introduce a method to achieve implicit surface uncertainty using color uncertainty, which reduces the time needed for view selection. Further with these two tasks, we propose an adaptive strategy for switching modes in view path planning, to reduce time and maintain superior reconstruction quality. Our method exhibits the highest reconstruction quality among all planning methods and superior planning efficiency in methods involving reconstruction tasks. We deploy our method on a UAV and the results show that our method can plan multi-task views and reconstruct a scene with high quality.
4/17/2024