LightOctree: Lightweight 3D Spatially-Coherent Indoor Lighting Estimation
2404.03925
0
0
Abstract
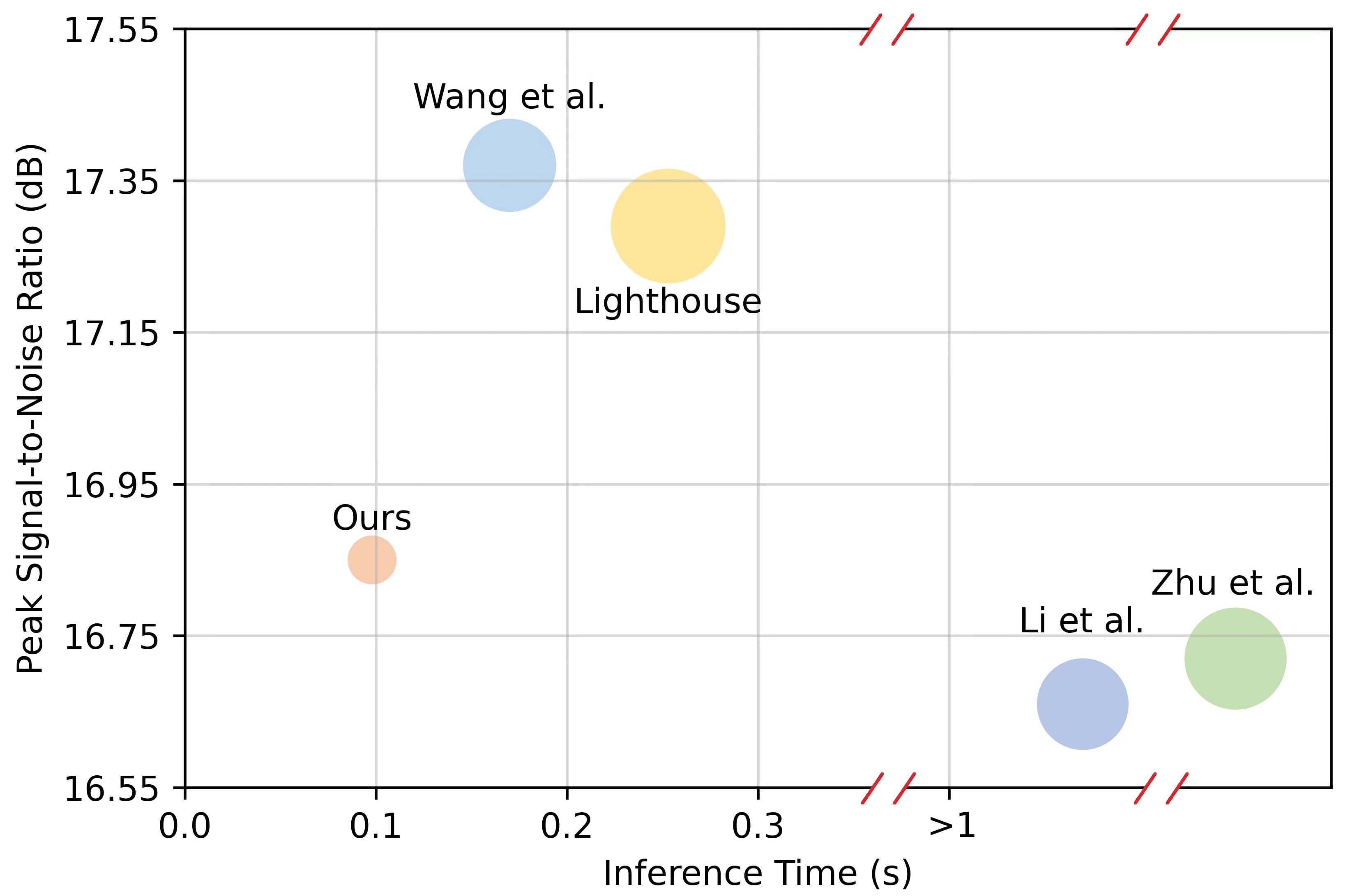
We present a lightweight solution for estimating spatially-coherent indoor lighting from a single RGB image. Previous methods for estimating illumination using volumetric representations have overlooked the sparse distribution of light sources in space, necessitating substantial memory and computational resources for achieving high-quality results. We introduce a unified, voxel octree-based illumination estimation framework to produce 3D spatially-coherent lighting. Additionally, a differentiable voxel octree cone tracing rendering layer is proposed to eliminate regular volumetric representation throughout the entire process and ensure the retention of features across different frequency domains. This reduction significantly decreases spatial usage and required floating-point operations without substantially compromising precision. Experimental results demonstrate that our approach achieves high-quality coherent estimation with minimal cost compared to previous methods.
Create account to get full access
Overview
- Proposes a lightweight 3D spatially-coherent indoor lighting estimation method called LightOctree
- Utilizes a compact octree-based representation to efficiently capture the spatial variation of indoor lighting
- Aims to enable accurate and efficient lighting estimation for applications like augmented reality and mixed reality
Plain English Explanation
LightOctree is a new technique for estimating the lighting conditions inside a building in 3D. It uses a special data structure called an octree to compactly represent how the lighting varies across different parts of the indoor space. This allows for accurate lighting estimation without requiring a lot of memory or processing power, which is important for applications like augmented reality and mixed reality where the lighting needs to be calculated in real-time. The goal is to enable these types of immersive experiences to work well on a wide range of devices, from powerful desktop computers to mobile phones.
Technical Explanation
The paper introduces LightOctree, a method for 3D spatially-coherent indoor lighting estimation. At the core of LightOctree is an octree-based representation that compactly captures the spatial variation of lighting within an indoor environment.
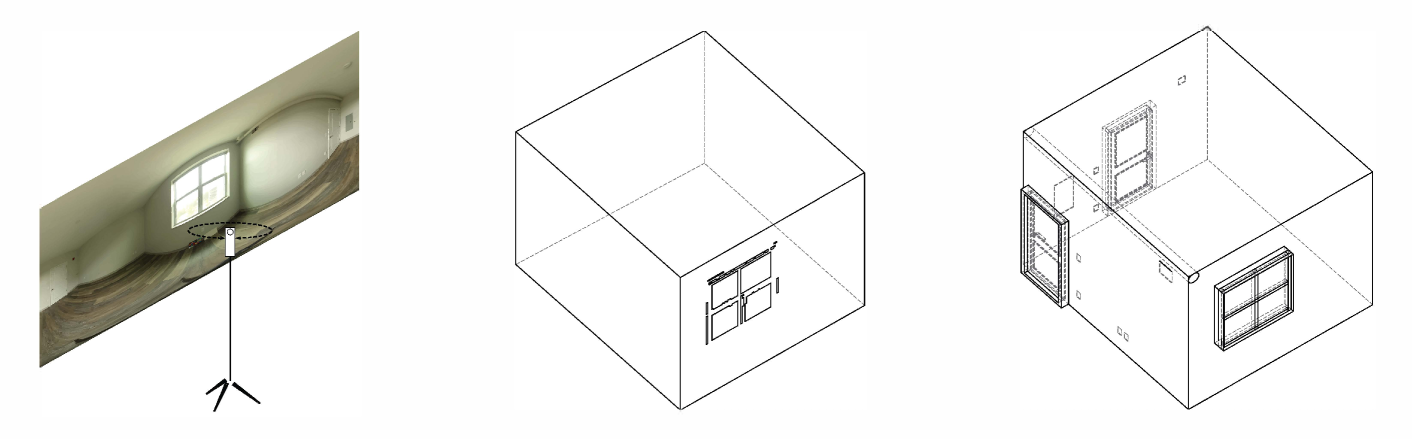
The approach first acquires 360-degree lighting observations at sparse locations within the space. It then constructs an octree data structure to efficiently model the 3D distribution of lighting. Each octree node stores a compact set of lighting parameters that describe the illumination within that spatial region.
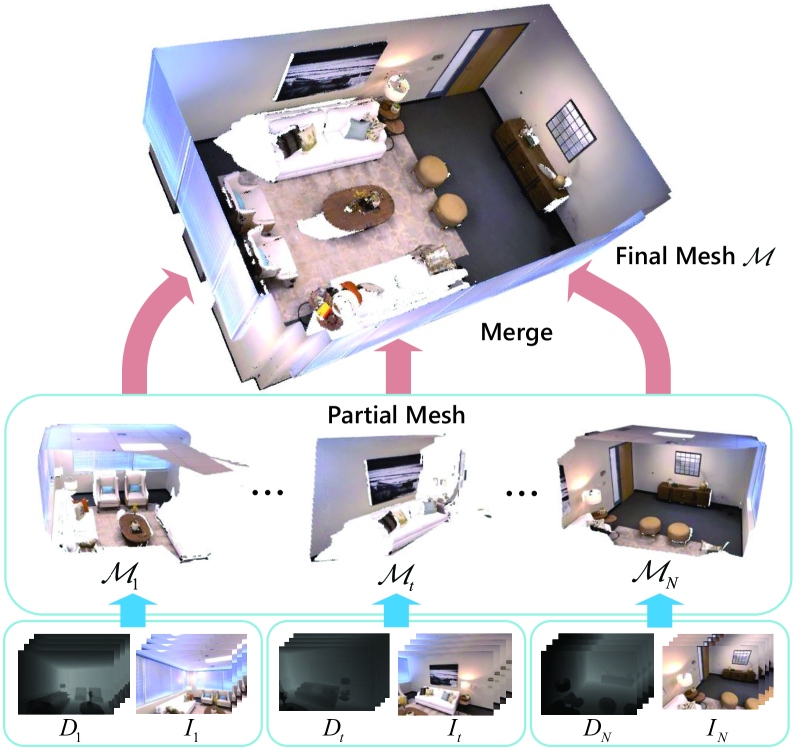
To estimate the lighting at a given 3D location, LightOctree performs a spatial lookup in the octree and interpolates the lighting parameters. This allows for accurate reconstruction of the spatially-varying lighting conditions while using significantly less memory compared to previous voxel-based approaches.
The authors evaluate LightOctree on both synthetic and real-world indoor datasets, demonstrating its ability to outperform prior methods in terms of lighting estimation accuracy and computational efficiency. They also show how the compact octree representation enables applications like point cloud and RGBD based indoor mapping and reconstruction with integrated lighting estimation.
Critical Analysis
The LightOctree paper presents a thoughtful and technically-sound approach to the challenge of efficient 3D indoor lighting estimation. By leveraging the octree data structure, the method is able to achieve a good balance between accuracy and computational cost, which is crucial for real-time applications.
One potential limitation is that the method relies on acquiring sparse 360-degree lighting observations throughout the indoor space. In practice, obtaining these observations may be challenging, especially in large or complex environments. The authors acknowledge this and suggest future work on techniques to reduce the required number of observation points.
Additionally, the paper focuses on modeling the direct lighting component, but does not explicitly address the estimation of indirect lighting effects like interreflections. Extending the approach to handle more realistic and global illumination scenarios could be an interesting area for further research.
Overall, the LightOctree technique represents a valuable contribution to the field of 3D lighting estimation, with promising applications in augmented reality, mixed reality, and other immersive computing domains. The compact and efficient representation, coupled with its demonstrated performance, makes LightOctree a compelling approach worth further exploration and development.
Conclusion
The LightOctree paper presents a novel method for 3D spatially-coherent indoor lighting estimation that uses a compact octree-based representation to efficiently capture the spatial variation of lighting. By achieving a good balance between accuracy and computational cost, LightOctree enables accurate lighting estimation for applications like augmented reality and mixed reality on a wide range of devices. The technique's potential to improve the realism and immersion of these emerging technologies makes it a valuable contribution to the field of 3D lighting estimation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Fully Sparse 3D Occupancy Prediction
Haisong Liu, Yang Chen, Haiguang Wang, Zetong Yang, Tianyu Li, Jia Zeng, Li Chen, Hongyang Li, Limin Wang
0
0
Occupancy prediction plays a pivotal role in autonomous driving. Previous methods typically construct dense 3D volumes, neglecting the inherent sparsity of the scene and suffering high computational costs. To bridge the gap, we introduce a novel fully sparse occupancy network, termed SparseOcc. SparseOcc initially reconstructs a sparse 3D representation from visual inputs and subsequently predicts semantic/instance occupancy from the 3D sparse representation by sparse queries. A mask-guided sparse sampling is designed to enable sparse queries to interact with 2D features in a fully sparse manner, thereby circumventing costly dense features or global attention. Additionally, we design a thoughtful ray-based evaluation metric, namely RayIoU, to solve the inconsistency penalty along depths raised in traditional voxel-level mIoU criteria. SparseOcc demonstrates its effectiveness by achieving a RayIoU of 34.0, while maintaining a real-time inference speed of 17.3 FPS, with 7 history frames inputs. By incorporating more preceding frames to 15, SparseOcc continuously improves its performance to 35.1 RayIoU without whistles and bells. Code is available at https://github.com/MCG-NJU/SparseOcc.
4/9/2024

GS-Octree: Octree-based 3D Gaussian Splatting for Robust Object-level 3D Reconstruction Under Strong Lighting
Jiaze Li, Zhengyu Wen, Luo Zhang, Jiangbei Hu, Fei Hou, Zhebin Zhang, Ying He
0
0
The 3D Gaussian Splatting technique has significantly advanced the construction of radiance fields from multi-view images, enabling real-time rendering. While point-based rasterization effectively reduces computational demands for rendering, it often struggles to accurately reconstruct the geometry of the target object, especially under strong lighting. To address this challenge, we introduce a novel approach that combines octree-based implicit surface representations with Gaussian splatting. Our method consists of four stages. Initially, it reconstructs a signed distance field (SDF) and a radiance field through volume rendering, encoding them in a low-resolution octree. The initial SDF represents the coarse geometry of the target object. Subsequently, it introduces 3D Gaussians as additional degrees of freedom, which are guided by the SDF. In the third stage, the optimized Gaussians further improve the accuracy of the SDF, allowing it to recover finer geometric details compared to the initial SDF obtained in the first stage. Finally, it adopts the refined SDF to further optimize the 3D Gaussians via splatting, eliminating those that contribute little to visual appearance. Experimental results show that our method, which leverages the distribution of 3D Gaussians with SDFs, reconstructs more accurate geometry, particularly in images with specular highlights caused by strong lighting.
6/27/2024
Evaluating Panoramic 3D Estimation in Indoor Lighting Analysis
Zining Cheng, Guanzhou Ji
0
0
This paper presents the use of panoramic 3D estimation in lighting simulation. Conventional lighting simulation necessitates detailed modeling as input, resulting in significant labor effort and time cost. The 3D layout estimation method directly takes a single panorama as input and generates a lighting simulation model with room geometry and window aperture. We evaluate the simulation results by comparing the luminance errors between on-site High Dynamic Range (HDR) photographs, 3D estimation model, and detailed model in panoramic representation and fisheye perspective. Given the selected scene, the results demonstrate the estimated room layout is reliable for lighting simulation.
5/21/2024
HVOFusion: Incremental Mesh Reconstruction Using Hybrid Voxel Octree
Shaofan Liu, Junbo Chen, Jianke Zhu
0
0
Incremental scene reconstruction is essential to the navigation in robotics. Most of the conventional methods typically make use of either TSDF (truncated signed distance functions) volume or neural networks to implicitly represent the surface. Due to the voxel representation or involving with time-consuming sampling, they have difficulty in balancing speed, memory storage, and surface quality. In this paper, we propose a novel hybrid voxel-octree approach to effectively fuse octree with voxel structures so that we can take advantage of both implicit surface and explicit triangular mesh representation. Such sparse structure preserves triangular faces in the leaf nodes and produces partial meshes sequentially for incremental reconstruction. This storage scheme allows us to naturally optimize the mesh in explicit 3D space to achieve higher surface quality. We iteratively deform the mesh towards the target and recovers vertex colors by optimizing a shading model. Experimental results on several datasets show that our proposed approach is capable of quickly and accurately reconstructing a scene with realistic colors.
4/30/2024