Hybrid Quadratic Programming -- Pullback Bundle Dynamical Systems Control

0

Sign in to get full access
Overview
- This research paper presents a new approach to controlling hybrid quadratic programming problems using pullback bundle dynamical systems.
- The method combines techniques from quadratic programming, control theory, and differential geometry to develop a more efficient and robust control system.
- The authors demonstrate the effectiveness of their approach through numerical simulations and discuss its potential applications in fields like robotics, energy systems, and transportation.
Plain English Explanation
The paper describes a new way to control complex systems that can be modeled using a combination of continuous and discrete dynamics. These "hybrid" systems are challenging to manage because they involve both smooth, continuous changes over time as well as abrupt, discrete changes in state.
The researchers propose using a mathematical concept called "pullback bundle dynamical systems" to improve the control of these hybrid systems. Essentially, they are using the geometry of the system's state space to guide the control strategy in a more effective way. This allows them to solve optimization problems, like minimizing energy usage or tracking a desired trajectory, more efficiently than previous methods.
The key idea is to leverage the underlying structure of the hybrid system to simplify the control problem. By incorporating insights from differential geometry, the researchers can develop control algorithms that are both computationally efficient and theoretically sound.
The paper demonstrates the advantages of this approach through computer simulations of various example systems, such as multi-axis robots and cable-trailer systems. They show how the pullback bundle method can outperform traditional quadratic programming techniques in terms of speed, accuracy, and robustness.
Technical Explanation
The core of the researchers' approach is to formulate the hybrid control problem as an optimization over a pullback bundle dynamical system. This allows them to leverage tools from differential geometry, such as the geometry of the system's state space, to develop more efficient control algorithms.
Specifically, the authors model the hybrid system using a combination of continuous state variables and discrete mode variables. They then define a pullback bundle structure over this hybrid state space, which captures the interplay between the continuous and discrete dynamics.
By casting the control problem in this geometric framework, the researchers are able to derive a set of necessary optimality conditions that characterize the solution. This leads to a hybrid quadratic programming formulation that can be solved efficiently using numerical optimization techniques.
The paper presents detailed algorithms for computing the pullback bundle control law and discusses stability, feasibility, and convergence properties of the proposed approach. The authors also demonstrate the performance of their method through several case studies, including multi-axis robot control and cable-trailer trajectory planning.
Critical Analysis
The researchers have presented a novel and theoretically grounded approach to controlling hybrid dynamical systems. By leveraging tools from differential geometry, they have developed a framework that offers several advantages over traditional quadratic programming methods.
One key strength of the pullback bundle approach is its ability to capture the interplay between continuous and discrete dynamics in a principled way. This allows for more accurate modeling of complex hybrid systems, which is crucial for applications like robotics and energy systems.
However, the paper does acknowledge some limitations of the proposed method. For example, the authors note that the computational complexity of the algorithms may still be a challenge for large-scale systems. Additionally, the stability and convergence guarantees provided in the paper rely on certain assumptions about the system's dynamics and constraints.
Further research could explore ways to improve the scalability and robustness of the pullback bundle control framework. Potential directions include developing specialized numerical solvers, incorporating machine learning techniques for learning deep dynamical systems, or exploring alternative geometric structures that may be better suited for certain classes of hybrid systems.
Overall, this paper represents a valuable contribution to the field of hybrid systems control, demonstrating the power of geometric approaches to tackle complex optimization and control problems.
Conclusion
This research presents a novel approach to controlling hybrid quadratic programming problems using pullback bundle dynamical systems. By leveraging tools from differential geometry, the authors have developed a framework that can effectively capture the interplay between continuous and discrete dynamics in complex hybrid systems.
The key innovation is the formulation of the control problem within the pullback bundle structure, which allows for the derivation of efficient optimization algorithms. The researchers demonstrate the effectiveness of their approach through numerical simulations, showing improvements over traditional quadratic programming techniques in terms of speed, accuracy, and robustness.
While the proposed method has some limitations in terms of computational complexity, this work represents an important step forward in the field of hybrid systems control. The pullback bundle framework provides a principled way to integrate insights from control theory, optimization, and differential geometry to tackle challenging real-world problems in domains like robotics, energy systems, and transportation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hybrid Quadratic Programming -- Pullback Bundle Dynamical Systems Control
Bernardo Fichera, Aude Billard
Dynamical System (DS)-based closed-loop control is a simple and effective way to generate reactive motion policies that well generalize to the robotic workspace, while retaining stability guarantees. Lately the formalism has been expanded in order to handle arbitrary geometry curved spaces, namely manifolds, beyond the standard flat Euclidean space. Despite the many different ways proposed to handle DS on manifolds, it is still unclear how to apply such structures on real robotic systems. In this preliminary study, we propose a way to combine modern optimal control techniques with a geometry-based formulation of DS. The advantage of such approach is two fold. First, it yields a torque-based control for compliant and adaptive motions; second, it generates dynamical systems consistent with the controlled system's dynamics. The salient point of the approach is that the complexity of designing a proper constrained-based optimal control problem, to ensure that dynamics move on a manifold while avoiding obstacles or self-collisions, is outsourced to the geometric DS. Constraints are implicitly embedded into the structure of the space in which the DS evolves. The optimal control, on the other hand, provides a torque-based control interface, and ensures dynamical consistency of the generated output. The whole can be achieved with minimal computational overhead since most of the computational complexity is delegated to the closed-form geometric DS.
Read more6/4/2024

0
New!Optimal Cosserat-based deformation control for robotic manipulation of linear objects
Azad Artinian, Faiz Ben Amar, Veronique Perdereau
The robotic shape control of deformable linear objects has garnered increasing interest within the robotics community. Despite recent progress, the majority of shape control approaches can be classified into two main groups: open-loop control, which relies on physically realistic models to represent the object, and closed-loop control, which employs less precise models alongside visual data to compute commands. In this work, we present a novel 3D shape control approach that includes the physically realistic Cosserat model into a closed-loop control framework, using vision feedback to rectify errors in real-time. This approach capitalizes on the advantages of both groups: the realism and precision provided by physics-based models, and the rapid computation, therefore enabling real-time correction of model errors, and robustness to elastic parameter estimation inherent in vision-based approaches. This is achieved by computing a deformation Jacobian derived from both the Cosserat model and visual data. To demonstrate the effectiveness of the method, we conduct a series of shape control experiments where robots are tasked with deforming linear objects towards a desired shape.
Read more9/20/2024

0
Physics-data hybrid dynamic model of a multi-axis manipulator for sensorless dexterous manipulation and high-performance motion planning
Wu-Te Yang, Jyun-Ming Liao, Pei-Chun Lin
We report on the development of an implementable physics-data hybrid dynamic model for an articulated manipulator to plan and operate in various scenarios. Meanwhile, the physics-based and data-driven dynamic models are studied in this research to select the best model for planning. The physics-based model is constructed using the Lagrangian method, and the loss terms include inertia loss, viscous loss, and friction loss. As for the data-driven model, three methods are explored, including DNN, LSTM, and XGBoost. Our modeling results demonstrate that, after comprehensive hyperparameter optimization, the XGBoost architecture outperforms DNN and LSTM in accurately representing manipulator dynamics. The hybrid model with physics-based and data-driven terms has the best performance among all models based on the RMSE criteria, and it only needs about 24k of training data. In addition, we developed a virtual force sensor of a manipulator using the observed external torque derived from the dynamic model and designed a motion planner through the physics-data hybrid dynamic model. The external torque contributes to forces and torque on the end effector, facilitating interaction with the surroundings, while the internal torque governs manipulator motion dynamics and compensates for internal losses. By estimating external torque via the difference between measured joint torque and internal losses, we implement a sensorless control strategy which is demonstrated through a peg-in-hole task. Lastly, a learning-based motion planner based on the hybrid dynamic model assists in planning time-efficient trajectories for the manipulator. This comprehensive approach underscores the efficacy of integrating physics-based and data-driven models for advanced manipulator control and planning in industrial environments.
Read more5/8/2024
0
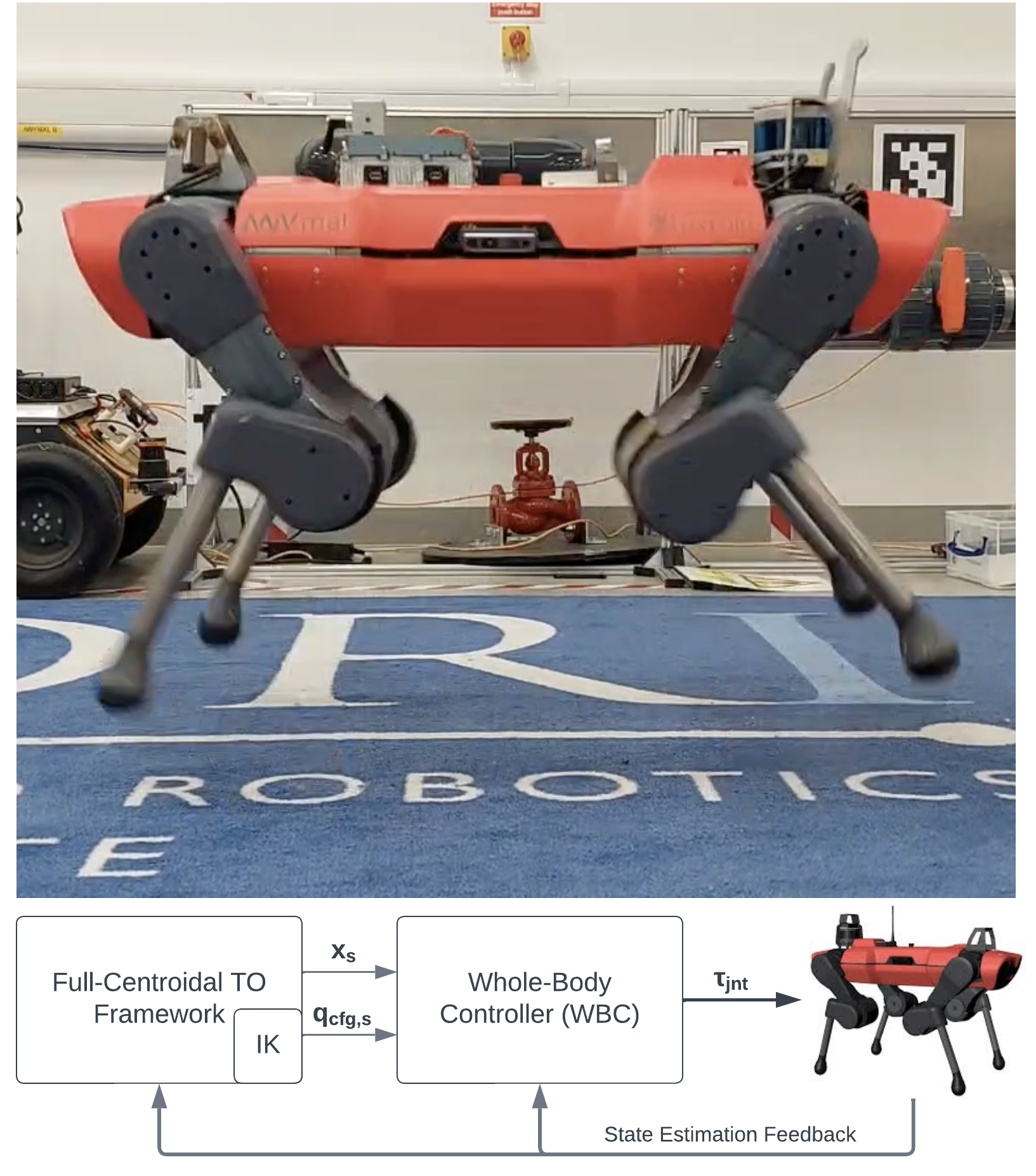
Momentum-Aware Trajectory Optimisation using Full-Centroidal Dynamics and Implicit Inverse Kinematics
Aristotelis Papatheodorou, Wolfgang Merkt, Alexander L. Mitchell, Ioannis Havoutis
The current state-of-the-art gradient-based optimisation frameworks are able to produce impressive dynamic manoeuvres such as linear and rotational jumps. However, these methods, which optimise over the full rigid-body dynamics of the robot, often require precise foothold locations apriori, while real-time performance is not guaranteed without elaborate regularisation and tuning of the cost function. In contrast, we investigate the advantages of a task-space optimisation framework, with special focus on acrobatic motions. Our proposed formulation exploits the system's high-order nonlinearities, such as the nonholonomy of the angular momentum, in order to produce feasible, high-acceleration manoeuvres. By leveraging the full-centroidal dynamics of the quadruped ANYmal C and directly optimising its footholds and contact forces, the framework is capable of producing efficient motion plans with low computational overhead. Finally, we deploy our proposed framework on the ANYmal C platform, and demonstrate its true capabilities through real-world experiments, with the successful execution of high-acceleration motions, such as linear and rotational jumps. Extensive analysis of these shows that the robot's dynamics can be exploited to surpass its hardware limitations of having a high mass and low-torque limits.
Read more9/14/2024