Hyperparameter Selection in Continual Learning

0

Sign in to get full access
Overview
- This paper explores the challenge of selecting suitable hyperparameters for continual learning (CL) algorithms.
- CL algorithms aim to enable machine learning models to continuously learn and adapt to new tasks without forgetting previous knowledge.
- Effective hyperparameter selection is crucial for the performance of CL algorithms, but it is a complex and time-consuming task.
Plain English Explanation
Continual learning (CL) is a machine learning technique that allows models to keep learning and improving over time, without forgetting what they've already learned. This is an important capability, as it enables models to adapt and become more useful in the real world.
However, getting CL models to work well requires carefully tuning a set of parameters, called "hyperparameters." These hyperparameters control various aspects of how the model learns and behaves. Choosing the right hyperparameters is crucial for the model's performance, but it can be a very challenging and time-consuming task.
This paper explores ways to make the process of selecting hyperparameters for CL models more efficient and effective. The researchers investigate different strategies and techniques that can help identify the best hyperparameter settings for a given CL problem, without having to try out every possible combination.
Technical Explanation
The paper first provides an overview of the standard continual learning (CL) setting, where a model is trained on a sequence of tasks and must learn to perform well on all of them without forgetting the previous ones. It then reviews related work on hyperparameter optimization and CL evaluation.
The key contribution of the paper is the introduction of a new hyperparameter selection approach for CL, called Online Continuous Hyperparameter Optimization for Generalized Linear Contextual Bandits. This method treats the hyperparameter selection process as a multi-armed bandit problem, where the "arms" correspond to different hyperparameter configurations. The approach continuously updates its beliefs about the best hyperparameters as the CL training progresses, allowing it to efficiently explore the hyperparameter space.
The paper also discusses the Unreasonable Effectiveness of Early Discarding After One Epoch technique, which can further improve the efficiency of hyperparameter search by quickly eliminating poor-performing configurations.
The proposed methods are evaluated on several CL benchmarks, where they are shown to outperform existing hyperparameter optimization approaches in terms of both performance and efficiency.
Critical Analysis
The paper presents a novel and promising approach to the important problem of hyperparameter selection for continual learning. By treating the hyperparameter optimization as a multi-armed bandit problem, the method can efficiently explore the hyperparameter space and identify the best configurations.
However, the paper does not address several potential limitations and areas for further research. For example, the proposed method assumes that the hyperparameters have a relatively smooth and continuous impact on the model's performance, which may not always be the case. Additionally, the paper only considers a limited set of CL benchmarks, and it would be valuable to evaluate the approach on a wider range of tasks and settings.
Further research could also explore Tuning the Unknown: Revisiting Evaluation Strategies for Lifelong Reinforcement Learning and Continual Learning for Numerous Tasks from a Long Tail to address the challenges of hyperparameter selection in more complex and realistic CL scenarios.
Conclusion
This paper presents a novel approach to the critical problem of hyperparameter selection for continual learning algorithms. By treating the hyperparameter optimization as a multi-armed bandit problem, the proposed method can efficiently explore the hyperparameter space and identify the best configurations for a given CL task.
The results on several CL benchmarks are promising, and the paper contributes to the ongoing efforts to make continual learning more practical and effective. However, further research is needed to address the limitations and explore the broader applicability of the approach, including Integrating Hyperparameter Search into GraMML.
Overall, this paper represents an important step forward in the quest to develop robust and efficient continual learning systems that can adapt and learn in real-world, dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hyperparameter Selection in Continual Learning
Thomas L. Lee, Sigrid Passano Hellan, Linus Ericsson, Elliot J. Crowley, Amos Storkey
In continual learning (CL) -- where a learner trains on a stream of data -- standard hyperparameter optimisation (HPO) cannot be applied, as a learner does not have access to all of the data at the same time. This has prompted the development of CL-specific HPO frameworks. The most popular way to tune hyperparameters in CL is to repeatedly train over the whole data stream with different hyperparameter settings. However, this end-of-training HPO is unrealistic as in practice a learner can only see the stream once. Hence, there is an open question: what HPO framework should a practitioner use for a CL problem in reality? This paper answers this question by evaluating several realistic HPO frameworks. We find that all the HPO frameworks considered, including end-of-training HPO, perform similarly. We therefore advocate using the realistic and most computationally efficient method: fitting the hyperparameters on the first task and then fixing them throughout training.
Read more4/10/2024

0
Adaptive Hyperparameter Optimization for Continual Learning Scenarios
Rudy Semola, Julio Hurtado, Vincenzo Lomonaco, Davide Bacciu
Hyperparameter selection in continual learning scenarios is a challenging and underexplored aspect, especially in practical non-stationary environments. Traditional approaches, such as grid searches with held-out validation data from all tasks, are unrealistic for building accurate lifelong learning systems. This paper aims to explore the role of hyperparameter selection in continual learning and the necessity of continually and automatically tuning them according to the complexity of the task at hand. Hence, we propose leveraging the nature of sequence task learning to improve Hyperparameter Optimization efficiency. By using the functional analysis of variance-based techniques, we identify the most crucial hyperparameters that have an impact on performance. We demonstrate empirically that this approach, agnostic to continual scenarios and strategies, allows us to speed up hyperparameters optimization continually across tasks and exhibit robustness even in the face of varying sequential task orders. We believe that our findings can contribute to the advancement of continual learning methodologies towards more efficient, robust and adaptable models for real-world applications.
Read more6/21/2024
0
Hyperparameters in Continual Learning: A Reality Check
Sungmin Cha, Kyunghyun Cho
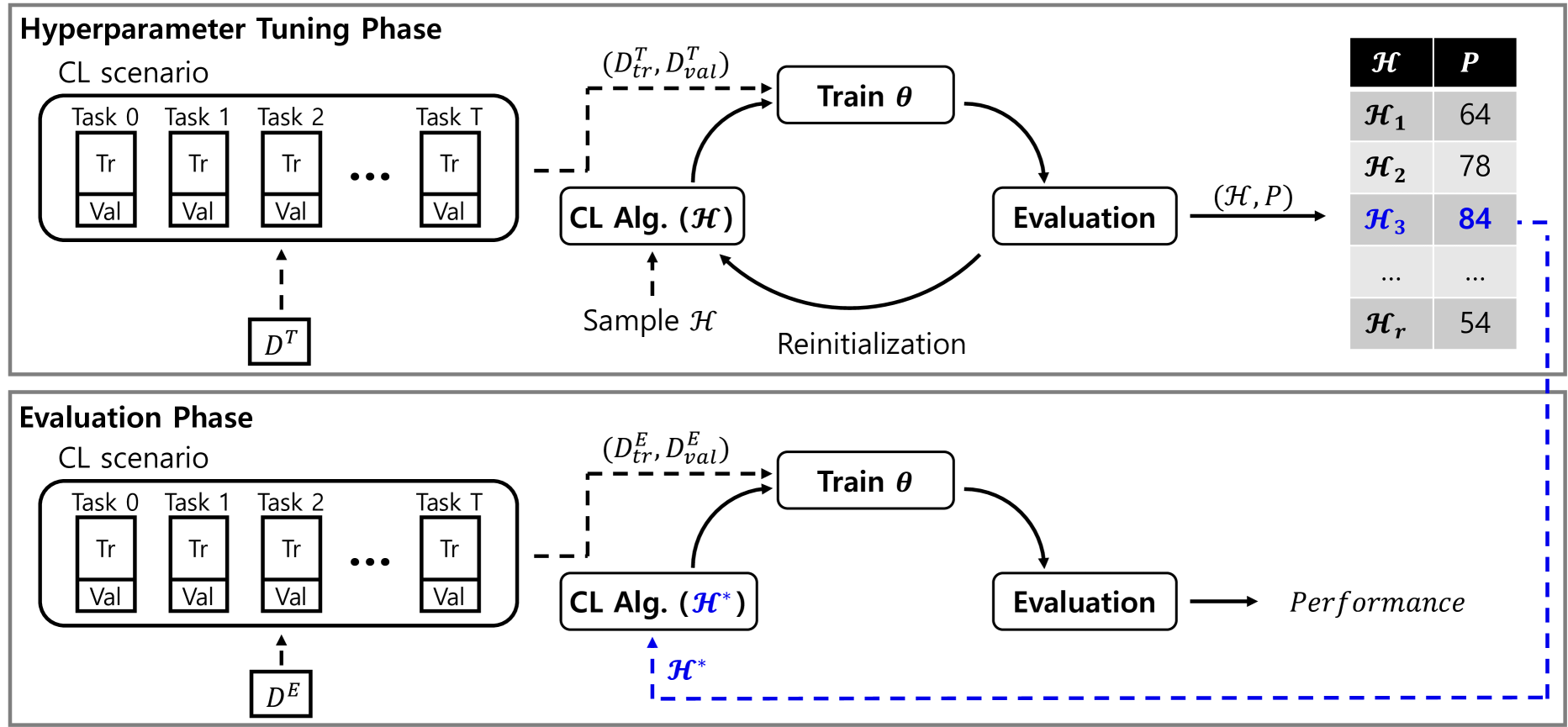
In this paper, we argue that the conventional evaluation protocol in continual learning (CL) research deviates from the fundamental principle in machine learning evaluation. The primary objective of CL algorithm is to balance the trade-off between plasticity (learning new knowledge from new tasks) and stability (retaining knowledge from previous tasks). To evaluate it, a CL scenario is constructed by using a benchmark dataset, where a neural network model is continually trained on the training data of each task, and the best hyperparameters for a CL algorithm are selected based on validation data.The final evaluation involves assessing the model trained with these hyperparameters on the test data from the same scenario. This evaluation protocol primarily aims to assess how well a CL algorithm performs on unseen data within that specific scenario. However, to accurately evaluate the CL algorithm, the focus should be on assessing generalizability of each algorithm's CL capacity to handle unseen scenarios. To achieve this evaluation goal, we propose a revised evaluation protocol. Our protocol consists of two phases: hyperparameter tuning and evaluation. Both phases share the same scenario configuration (e.g., the number of tasks) but the scenarios for each phase are generated from different datasets. During the hyperparameter tuning phase, the best hyperparameters are identified, which are then used to train the model using the CL algorithm in the evaluation phase. Finally, the result from this phase is reported as the final evaluation. We apply the proposed evaluation protocol to class-incremental learning algorithms, both with and without a pretrained model. Through extensive experiments involving approximately 5000 trials, we demonstrate that most state-of-the-art algorithms fail to exhibit the reported performance, revealing a lack of generalizability.
Read more8/19/2024
🛠️
0
Hyperparameter Optimization Can Even be Harmful in Off-Policy Learning and How to Deal with It
Yuta Saito, Masahiro Nomura
There has been a growing interest in off-policy evaluation in the literature such as recommender systems and personalized medicine. We have so far seen significant progress in developing estimators aimed at accurately estimating the effectiveness of counterfactual policies based on biased logged data. However, there are many cases where those estimators are used not only to evaluate the value of decision making policies but also to search for the best hyperparameters from a large candidate space. This work explores the latter hyperparameter optimization (HPO) task for off-policy learning. We empirically show that naively applying an unbiased estimator of the generalization performance as a surrogate objective in HPO can cause an unexpected failure, merely pursuing hyperparameters whose generalization performance is greatly overestimated. We then propose simple and computationally efficient corrections to the typical HPO procedure to deal with the aforementioned issues simultaneously. Empirical investigations demonstrate the effectiveness of our proposed HPO algorithm in situations where the typical procedure fails severely.
Read more4/24/2024