Hyperparameters in Continual Learning: A Reality Check

0
Sign in to get full access
Overview
- This paper examines the role of hyperparameters in continual learning, a challenging machine learning problem where models must learn new tasks without forgetting previous knowledge.
- The authors propose a comprehensive evaluation protocol to better understand the impact of hyperparameters on continual learning performance.
- They analyze the sensitivity of several continual learning methods to hyperparameter choices and provide practical insights for deploying these methods in real-world settings.
Plain English Explanation
Continual learning is when a machine learning model tries to learn new skills or tasks without forgetting what it has already learned. This is a challenging problem because as a model learns new things, it can sometimes "forget" the old things it knew.
This paper looks at the role of hyperparameters in continual learning. Hyperparameters are settings that the researcher chooses before training a model, like the learning rate or the number of training epochs. The authors wanted to see how sensitive continual learning methods are to the choice of hyperparameters.
To do this, they developed a new way to test continual learning models that looks at how well the models perform on a variety of different tasks. This gives a more comprehensive view of how the models work in real-world situations, rather than just looking at performance on a single task.
The authors then analyzed several popular continual learning methods to see how their performance changed when the hyperparameters were adjusted. They found that the choice of hyperparameters can have a big impact on how well the models perform, and provided some practical tips for researchers and practitioners on how to choose good hyperparameters for continual learning.
Technical Explanation
The paper proposes a new evaluation protocol for continual learning that tests models on a diverse set of tasks, rather than just a single task. This provides a more holistic view of continual learning performance, as models need to adapt to various types of learning challenges.
The authors then analyze the sensitivity of several continual learning methods to hyperparameter choices, including rehearsal-based approaches like Experience Replay (ER) and gradient-based approaches like Elastic Weight Consolidation (EWC). They find that performance can vary significantly based on hyperparameter settings, even for the same underlying continual learning algorithm.
The detailed experimental results show that the optimal hyperparameters can differ across tasks and continual learning methods. This highlights the importance of extensive hyperparameter tuning and evaluation to ensure continual learning models perform well in realistic scenarios.
Critical Analysis
The authors acknowledge that their evaluation protocol, while more comprehensive than single-task benchmarks, still has limitations. The suite of tasks may not cover all real-world continual learning scenarios, and the authors encourage further development of standardized benchmarks.
Additionally, the paper focuses on widely-used continual learning algorithms, but does not explore more recent methods or potential synergies between different approaches. Exploring the hyperparameter sensitivity of emerging continual learning techniques would be a valuable direction for future research.
Overall, this work provides a valuable reality check on the role of hyperparameters in continual learning, highlighting the importance of rigorous evaluation and the need for further advancements in this challenging area of machine learning.
Conclusion
This paper demonstrates the significant impact of hyperparameter choices on the performance of continual learning models. By proposing a comprehensive evaluation protocol and analyzing several popular continual learning methods, the authors provide practical insights to guide researchers and practitioners in deploying these models effectively.
The findings underscore the need for careful hyperparameter tuning and holistic performance evaluation to ensure continual learning systems can adapt to diverse real-world scenarios. This work lays important groundwork for further advancements in continual learning, a key capability for building adaptable and robust artificial intelligence systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hyperparameters in Continual Learning: A Reality Check
Sungmin Cha, Kyunghyun Cho
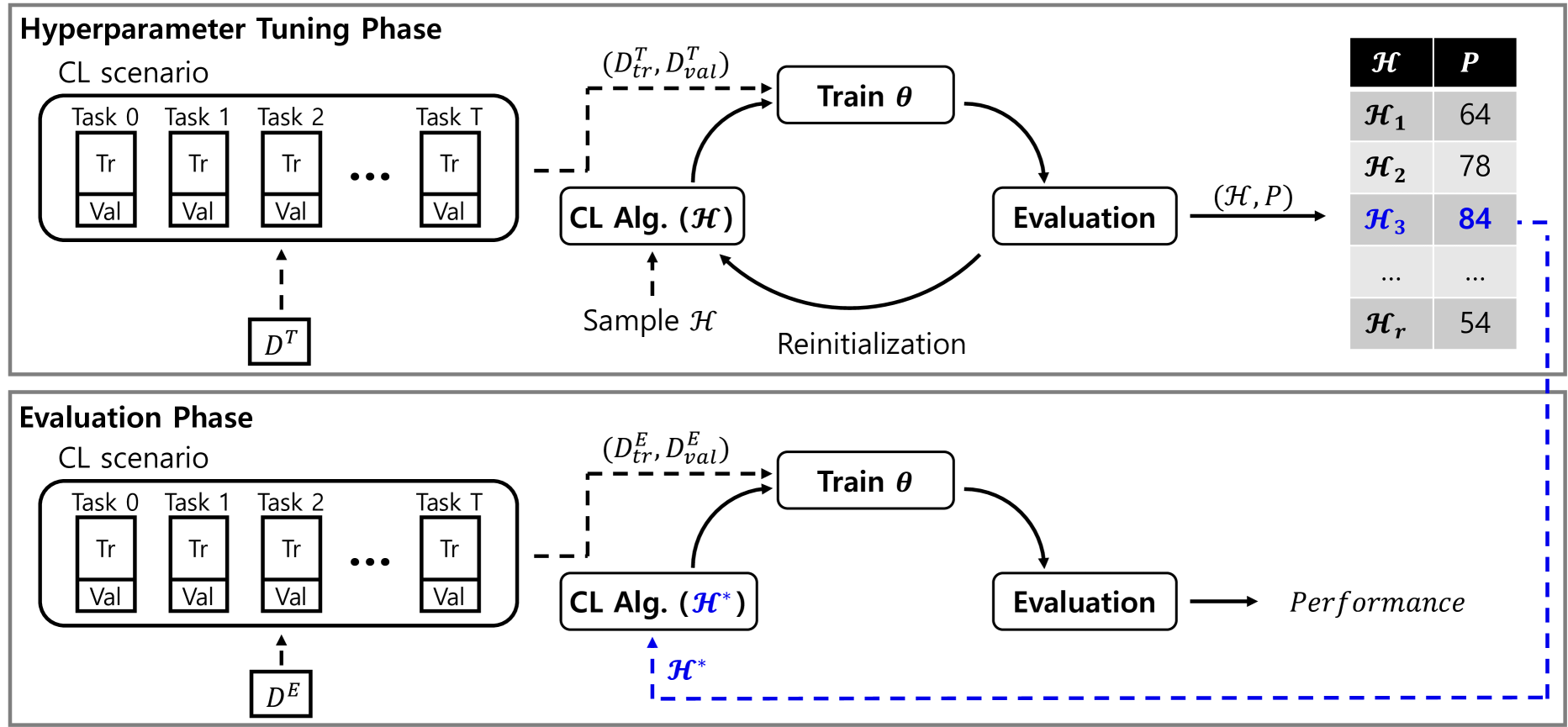
In this paper, we argue that the conventional evaluation protocol in continual learning (CL) research deviates from the fundamental principle in machine learning evaluation. The primary objective of CL algorithm is to balance the trade-off between plasticity (learning new knowledge from new tasks) and stability (retaining knowledge from previous tasks). To evaluate it, a CL scenario is constructed by using a benchmark dataset, where a neural network model is continually trained on the training data of each task, and the best hyperparameters for a CL algorithm are selected based on validation data.The final evaluation involves assessing the model trained with these hyperparameters on the test data from the same scenario. This evaluation protocol primarily aims to assess how well a CL algorithm performs on unseen data within that specific scenario. However, to accurately evaluate the CL algorithm, the focus should be on assessing generalizability of each algorithm's CL capacity to handle unseen scenarios. To achieve this evaluation goal, we propose a revised evaluation protocol. Our protocol consists of two phases: hyperparameter tuning and evaluation. Both phases share the same scenario configuration (e.g., the number of tasks) but the scenarios for each phase are generated from different datasets. During the hyperparameter tuning phase, the best hyperparameters are identified, which are then used to train the model using the CL algorithm in the evaluation phase. Finally, the result from this phase is reported as the final evaluation. We apply the proposed evaluation protocol to class-incremental learning algorithms, both with and without a pretrained model. Through extensive experiments involving approximately 5000 trials, we demonstrate that most state-of-the-art algorithms fail to exhibit the reported performance, revealing a lack of generalizability.
Read more8/19/2024

0
Hyperparameter Selection in Continual Learning
Thomas L. Lee, Sigrid Passano Hellan, Linus Ericsson, Elliot J. Crowley, Amos Storkey
In continual learning (CL) -- where a learner trains on a stream of data -- standard hyperparameter optimisation (HPO) cannot be applied, as a learner does not have access to all of the data at the same time. This has prompted the development of CL-specific HPO frameworks. The most popular way to tune hyperparameters in CL is to repeatedly train over the whole data stream with different hyperparameter settings. However, this end-of-training HPO is unrealistic as in practice a learner can only see the stream once. Hence, there is an open question: what HPO framework should a practitioner use for a CL problem in reality? This paper answers this question by evaluating several realistic HPO frameworks. We find that all the HPO frameworks considered, including end-of-training HPO, perform similarly. We therefore advocate using the realistic and most computationally efficient method: fitting the hyperparameters on the first task and then fixing them throughout training.
Read more4/10/2024

0
Adaptive Hyperparameter Optimization for Continual Learning Scenarios
Rudy Semola, Julio Hurtado, Vincenzo Lomonaco, Davide Bacciu
Hyperparameter selection in continual learning scenarios is a challenging and underexplored aspect, especially in practical non-stationary environments. Traditional approaches, such as grid searches with held-out validation data from all tasks, are unrealistic for building accurate lifelong learning systems. This paper aims to explore the role of hyperparameter selection in continual learning and the necessity of continually and automatically tuning them according to the complexity of the task at hand. Hence, we propose leveraging the nature of sequence task learning to improve Hyperparameter Optimization efficiency. By using the functional analysis of variance-based techniques, we identify the most crucial hyperparameters that have an impact on performance. We demonstrate empirically that this approach, agnostic to continual scenarios and strategies, allows us to speed up hyperparameters optimization continually across tasks and exhibit robustness even in the face of varying sequential task orders. We believe that our findings can contribute to the advancement of continual learning methodologies towards more efficient, robust and adaptable models for real-world applications.
Read more6/21/2024
0
Improving Data-aware and Parameter-aware Robustness for Continual Learning
Hanxi Xiao, Fan Lyu
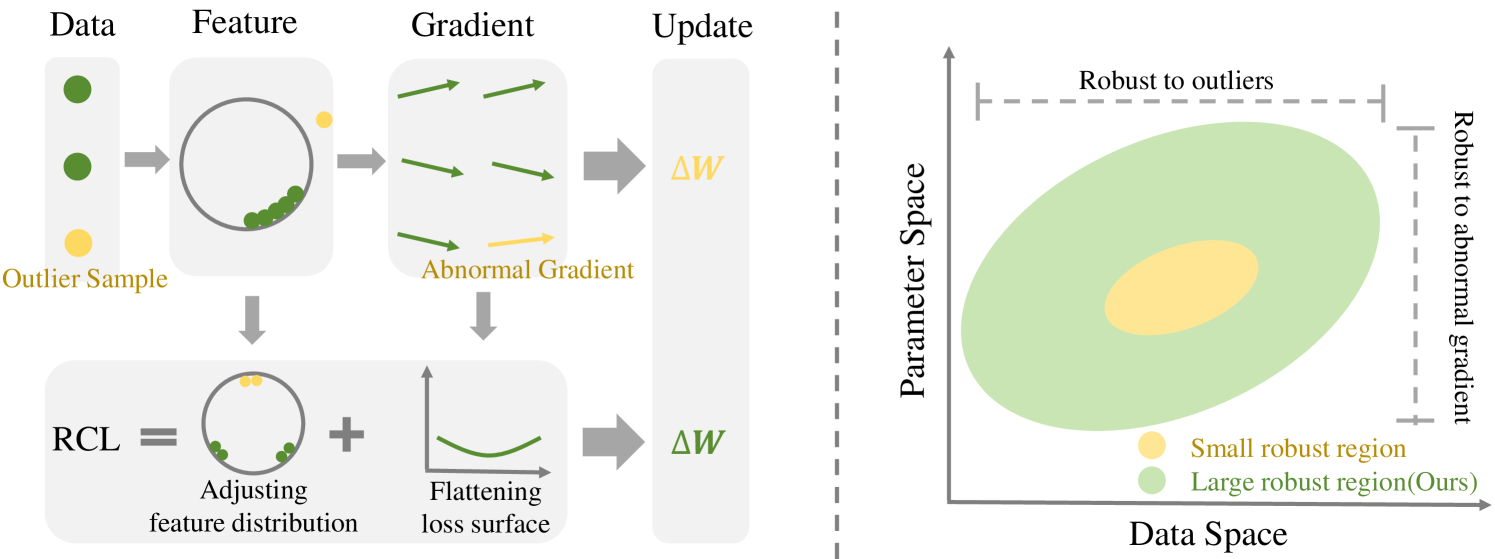
The goal of Continual Learning (CL) task is to continuously learn multiple new tasks sequentially while achieving a balance between the plasticity and stability of new and old knowledge. This paper analyzes that this insufficiency arises from the ineffective handling of outliers, leading to abnormal gradients and unexpected model updates. To address this issue, we enhance the data-aware and parameter-aware robustness of CL, proposing a Robust Continual Learning (RCL) method. From the data perspective, we develop a contrastive loss based on the concepts of uniformity and alignment, forming a feature distribution that is more applicable to outliers. From the parameter perspective, we present a forward strategy for worst-case perturbation and apply robust gradient projection to the parameters. The experimental results on three benchmarks show that the proposed method effectively maintains robustness and achieves new state-of-the-art (SOTA) results. The code is available at: https://github.com/HanxiXiao/RCL
Read more5/28/2024