Incorporating Navigation Context into Inland Vessel Trajectory Prediction: A Gaussian Mixture Model and Transformer Approach

0

Sign in to get full access
Overview
- The paper proposes a method for predicting the trajectory of inland vessels by incorporating navigation context data.
- It combines a Gaussian Mixture Model and a Transformer-based neural network to leverage both statistical and deep learning approaches.
- The method is evaluated on a dataset of inland vessel trajectories and shows improved performance compared to baseline models.
Plain English Explanation
Predicting the future path of ships and boats is an important task for transportation planning and safety. This paper focuses on predicting the trajectories of inland vessels, such as those traveling on rivers and canals. The researchers developed a new approach that combines two different machine learning techniques to make these predictions more accurate.
The first technique they used is called a Gaussian Mixture Model. This is a statistical method that can identify patterns in data and make predictions based on those patterns. The second technique is a type of neural network called a Transformer. Neural networks are a powerful machine learning tool that can learn complex relationships in data.
By using both of these approaches together, the researchers were able to leverage the strengths of each one. The Gaussian Mixture Model can capture the underlying statistical properties of vessel movements, while the Transformer can learn more nuanced patterns from the data. This hybrid model was then tested on a dataset of real inland vessel trajectories, and it outperformed other prediction methods.
The key innovation in this work is incorporating "navigation context" into the trajectory prediction. This means using additional data about the waterways, such as the locations of turns, bridges, and other landmarks. This contextual information helps the model make more accurate predictions about where the vessels are likely to go next.
Overall, this research demonstrates a promising approach for improving inland vessel trajectory forecasting, which has important applications for transportation planning, logistics, and safety. By combining statistical and deep learning techniques, the researchers have developed a more robust and effective way to predict the future movements of ships and boats.
Technical Explanation
The paper proposes a hybrid model for predicting the trajectory of inland vessels that combines a Gaussian Mixture Model and a Transformer-based neural network.
The Gaussian Mixture Model is used to capture the underlying statistical properties of vessel movements, such as the probability distributions of speed, heading, and position. This allows the model to make robust predictions based on these patterns in the data.
The Transformer component is then used to learn more complex, nonlinear relationships in the vessel trajectory data. Transformers are a type of neural network architecture that has shown success in modeling sequential data, such as natural language and vehicle trajectories.
By combining these two approaches, the model can leverage both the statistical insights of the Gaussian Mixture Model and the representational power of the Transformer network. This hybrid architecture is then trained on a dataset of inland vessel trajectories, which includes not only the vessel's position, speed, and heading, but also contextual information about the waterway, such as the locations of turns, bridges, and other landmarks.
The experiments show that incorporating this navigation context data into the model leads to significant improvements in trajectory prediction accuracy compared to baseline models that do not use this additional information.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed hybrid model for inland vessel trajectory prediction. The authors carefully justify their choice of modeling techniques and demonstrate the benefits of incorporating navigation context data.
One potential limitation of the work is the reliance on a relatively small dataset of inland vessel trajectories. While the authors make efforts to augment the data, it would be valuable to see how the model performs on larger, more diverse datasets that capture a wider range of vessel types, waterways, and operating conditions.
Additionally, the paper does not provide much insight into the interpretability of the model's predictions. Understanding the specific factors and relationships that the model has learned to make its forecasts could be valuable for domain experts and transportation planners.
Nevertheless, this research represents an important step forward in the field of vessel trajectory prediction. By combining statistical and deep learning approaches, and leveraging contextual data about the navigation environment, the authors have developed a more robust and effective method for forecasting the future paths of inland vessels.
Conclusion
This paper presents a novel hybrid approach for predicting the trajectories of inland vessels that combines a Gaussian Mixture Model and a Transformer-based neural network. The key innovation is the incorporation of navigation context data, such as the locations of waterway features, which helps the model make more accurate predictions.
The experimental results demonstrate the benefits of this hybrid approach, showing significant improvements in trajectory forecasting accuracy compared to baseline models. This research has important implications for transportation planning, logistics, and safety, as accurate vessel trajectory prediction can inform decision-making and help mitigate risks.
Overall, this work represents an important advancement in the field of vessel trajectory prediction, and the authors' combination of statistical and deep learning techniques provides a promising direction for future research in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Incorporating Navigation Context into Inland Vessel Trajectory Prediction: A Gaussian Mixture Model and Transformer Approach
Kathrin Donandt, Dirk Soffker
Using data sources beyond the Automatic Identification System to represent the context a vessel is navigating in and consequently improve situation awareness is still rare in machine learning approaches to vessel trajectory prediction (VTP). In inland shipping, where vessel movement is constrained within fairways, navigational context information is indispensable. In this contribution targeting inland VTP, Gaussian Mixture Models (GMMs) are applied, on a fused dataset of AIS and discharge measurements, to generate multi-modal distribution curves, capturing typical lateral vessel positioning in the fairway and dislocation speeds along the waterway. By sampling the probability density curves of the GMMs, feature vectors are derived which are used, together with spatio-temporal vessel features and fairway geometries, as input to a VTP transformer model. The incorporation of these distribution features of both the current and forthcoming navigation context improves prediction accuracy. The superiority of the model over a previously proposed transformer model for inland VTP is shown. The novelty lies in the provision of preprocessed, statistics-based features representing the conditioned spatial context, rather than relying on the model to extract relevant features for the VTP task from contextual data. Oversimplification of the complexity of inland navigation patterns by assuming a single typical route or selecting specific clusters prior to model application is avoided by giving the model access to the entire distribution information. The methodology's generalizability is demonstrated through the usage of data of 3 distinct river sections. It can be integrated into an interaction-aware prediction framework, where insights into the positioning of the actual vessel behavior in the overall distribution at the current location and discharge can enhance trajectory prediction accuracy.
Read more6/6/2024

0
Improved context-sensitive transformer model for inland vessel trajectory prediction
Kathrin Donandt, Karim Bottger, Dirk Soffker
Physics-related and model-based vessel trajectory prediction is highly accurate but requires specific knowledge of the vessel under consideration which is not always practical. Machine learning-based trajectory prediction models do not require expert knowledge, but rely on the implicit knowledge extracted from massive amounts of data. Several deep learning (DL) methods for vessel trajectory prediction have recently been suggested. The DL models developed typically only process information about the (dis)location of vessels defined with respect to a global reference system. In the context of inland navigation, this can be problematic, since without knowledge of the limited navigable space, irrealistic trajectories are likely to be determined. If spatial constraintes are introduced, e.g., by implementing an additional submodule to process map data, however, overall complexity increases. Instead of processing the vessel displacement information on the one hand and the spatial information on the other hand, the paper proposes the merging of both information. Here, fairway-related and navigation-related displacement information are used directly. In this way, the previously proposed context-sensitive Classification Transformer (CSCT) shows an improved spatial awareness. Additionally, the CSCT is adapted to assess the model uncertainty by enabling dropout during inference. This approach is trained on different inland waterways to analyze its generalizability. As the improved CSCT obtains lower prediction errors and enables to estimate the trustworthiness of each prediction, it is more suitable for safety-critical applications in inland navigation than previously developed models.
Read more6/6/2024
0
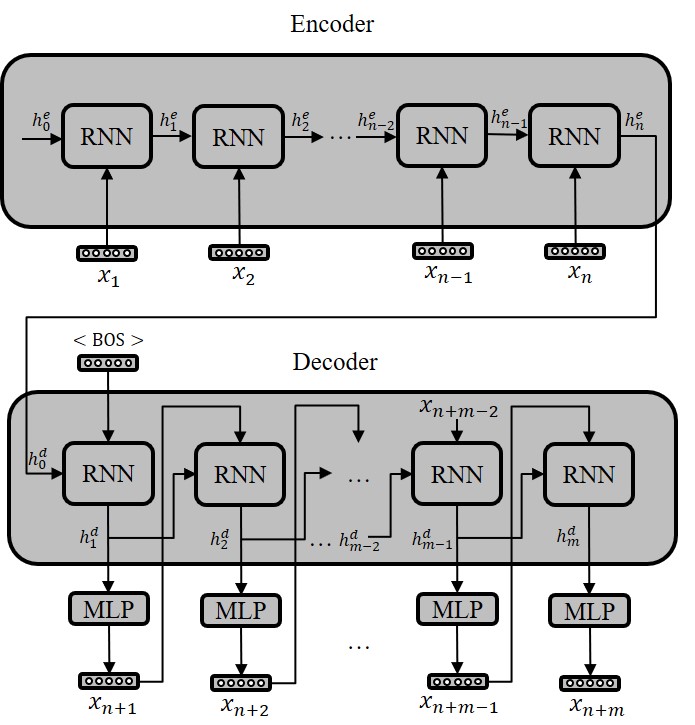
Short-term Inland Vessel Trajectory Prediction with Encoder-Decoder Models
Kathrin Donandt, Karim Bottger, Dirk Soffker
Accurate vessel trajectory prediction is necessary for save and efficient navigation. Deep learning-based prediction models, esp. encoder-decoders, are rarely applied to inland navigation specifically. Approaches from the maritime domain cannot directly be transferred to river navigation due to specific driving behavior influencing factors. Different encoder-decoder architectures, including a transformer encoder-decoder, are compared herein for predicting the next positions of inland vessels, given not only spatio-temporal information from AIS, but also river specific features. The results show that the reformulation of the regression task as classification problem and the inclusion of river specific features yield the lowest displacement errors. The standard LSTM encoder-decoder outperforms the transformer encoder-decoder for the data considered, but is computationally more expensive. In this study for the first time a transformer-based encoder-decoder model is applied to the problem of predicting the ship trajectory. Here, a feature vector using the river-specific context of navigation input parameters is established. Future studies can built on the proposed models, investigate the improvement of the computationally more efficient transformer, e.g. through further hyper-parameter optimization, and use additional river-specific information in the context representation to further increase prediction accuracy.
Read more6/6/2024

0
Enhancing Global Maritime Traffic Network Forecasting with Gravity-Inspired Deep Learning Models
Ruixin Song, Gabriel Spadon, Ronald Pelot, Stan Matwin, Amilcar Soares
Aquatic non-indigenous species (NIS) pose significant threats to biodiversity, disrupting ecosystems and inflicting substantial economic damages across agriculture, forestry, and fisheries. Due to the fast growth of global trade and transportation networks, NIS has been introduced and spread unintentionally in new environments. This study develops a new physics-informed model to forecast maritime shipping traffic between port regions worldwide. The predicted information provided by these models, in turn, is used as input for risk assessment of NIS spread through transportation networks to evaluate the capability of our solution. Inspired by the gravity model for international trades, our model considers various factors that influence the likelihood and impact of vessel activities, such as shipping flux density, distance between ports, trade flow, and centrality measures of transportation hubs. Accordingly, this paper introduces transformers to gravity models to rebuild the short- and long-term dependencies that make the risk analysis feasible. Thus, we introduce a physics-inspired framework that achieves an 89% binary accuracy for existing and non-existing trajectories and an 84.8% accuracy for the number of vessels flowing between key port areas, representing more than 10% improvement over the traditional deep-gravity model. Along these lines, this research contributes to a better understanding of NIS risk assessment. It allows policymakers, conservationists, and stakeholders to prioritize management actions by identifying high-risk invasion pathways. Besides, our model is versatile and can include new data sources, making it suitable for assessing international vessel traffic flow in a changing global landscape.
Read more7/12/2024