Short-term Inland Vessel Trajectory Prediction with Encoder-Decoder Models

0
Sign in to get full access
Overview
- This paper focuses on predicting the short-term trajectory of inland vessels using encoder-decoder models, which are a type of machine learning architecture.
- The researchers developed and evaluated several variations of encoder-decoder models, including those that incorporate transformer-based components, to improve the accuracy of inland vessel trajectory prediction.
- The models were trained and tested on real-world data collected from automatic identification system (AIS) sensors on inland waterways.
Plain English Explanation
The paper looks at a problem called "inland vessel trajectory prediction." This means trying to forecast the future path or movement of ships and boats that travel on rivers, canals, and other inland waterways. Accurately predicting these trajectories can be useful for things like traffic management, collision avoidance, and logistical planning.
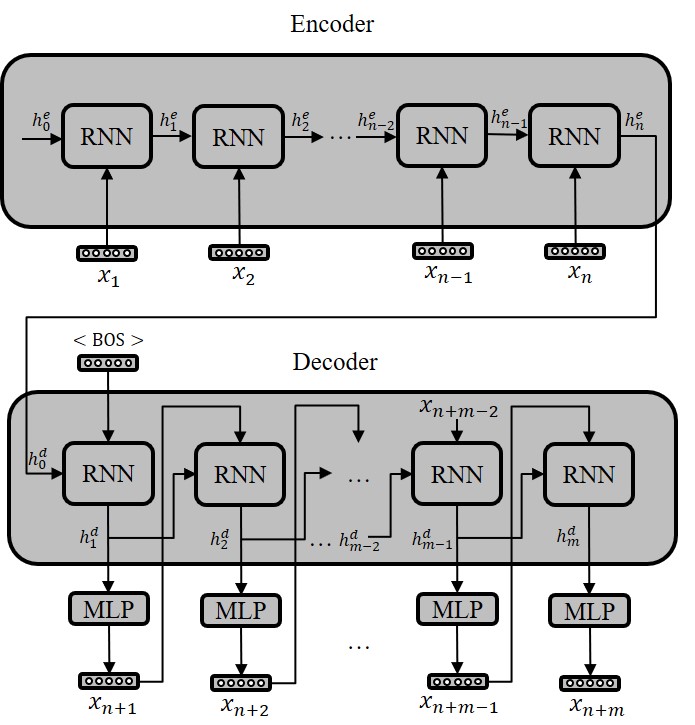
The researchers used a type of machine learning model called an "encoder-decoder" to tackle this problem. Encoder-decoder models are good at tasks like language translation, where you take some input (like a sentence in one language) and generate a related output (the translation in another language).
In this case, the input to the model would be the recent movement history of a vessel, and the output would be a prediction of where that vessel will go in the near future. The researchers experimented with different variations of the encoder-decoder architecture, including some that incorporated a special kind of neural network called a "transformer."
They trained and tested these models on real data collected from sensors on inland waterways, to see how well they could predict the short-term trajectories of the vessels. The goal was to develop accurate and reliable models that could be used in practical applications for inland navigation.
Technical Explanation
The researchers proposed using encoder-decoder models to predict the short-term trajectories of inland vessels. Encoder-decoder architectures are well-suited for sequence-to-sequence tasks, where the model needs to generate an output sequence (the predicted trajectory) given an input sequence (the vessel's movement history).
They evaluated several variants of the encoder-decoder model, including ones that incorporate transformer-based components. Transformers are a type of neural network that has shown strong performance on a variety of natural language processing tasks, and the researchers hypothesized that these components could also be beneficial for vessel trajectory prediction.
The models were trained and tested on real-world data collected from automatic identification system (AIS) sensors installed on inland waterways. AIS data provides information about the position, speed, and heading of vessels, which the models used as input to generate trajectory predictions.
The researchers conducted extensive experiments to compare the performance of their proposed encoder-decoder variants, as well as to investigate the impact of different input features and model hyperparameters. They evaluated the models using metrics like trajectory error and arrival time prediction accuracy.
Critical Analysis
The paper provides a thorough investigation of using encoder-decoder models for short-term inland vessel trajectory prediction. The researchers have made a valuable contribution by exploring various model architectures and evaluating their performance on real-world data.
One potential limitation mentioned in the paper is the reliance on AIS data, which may not be available or reliable in all situations. The researchers acknowledge that incorporating additional contextual information, such as navigation conditions and environmental factors, could further improve the models' predictive capabilities.
Additionally, the paper focuses on short-term trajectory prediction (e.g., several minutes to an hour), but longer-term forecasting may be desirable in some applications. Exploring ways to extend the prediction horizon while maintaining accuracy could be an area for future research.
The paper also does not address the potential challenges of using probabilistic models for vessel trajectory prediction, such as generating robust probability distributions and handling uncertainty. Incorporating these aspects could be a valuable direction for further development.
Conclusion
This paper presents a comprehensive study on using encoder-decoder models, including transformer-based variants, for short-term inland vessel trajectory prediction. The researchers have demonstrated the potential of these models to accurately forecast the near-future movements of vessels based on their past trajectories and AIS data.
The findings of this work can contribute to the development of more advanced navigation systems and traffic management solutions for inland waterways. By improving the ability to predict vessel trajectories, these technologies can enhance safety, optimize logistics, and support more efficient and sustainable inland transportation.
Overall, the paper provides a solid foundation for continued research and innovation in the field of intelligent transportation systems for inland navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Short-term Inland Vessel Trajectory Prediction with Encoder-Decoder Models
Kathrin Donandt, Karim Bottger, Dirk Soffker
Accurate vessel trajectory prediction is necessary for save and efficient navigation. Deep learning-based prediction models, esp. encoder-decoders, are rarely applied to inland navigation specifically. Approaches from the maritime domain cannot directly be transferred to river navigation due to specific driving behavior influencing factors. Different encoder-decoder architectures, including a transformer encoder-decoder, are compared herein for predicting the next positions of inland vessels, given not only spatio-temporal information from AIS, but also river specific features. The results show that the reformulation of the regression task as classification problem and the inclusion of river specific features yield the lowest displacement errors. The standard LSTM encoder-decoder outperforms the transformer encoder-decoder for the data considered, but is computationally more expensive. In this study for the first time a transformer-based encoder-decoder model is applied to the problem of predicting the ship trajectory. Here, a feature vector using the river-specific context of navigation input parameters is established. Future studies can built on the proposed models, investigate the improvement of the computationally more efficient transformer, e.g. through further hyper-parameter optimization, and use additional river-specific information in the context representation to further increase prediction accuracy.
Read more6/6/2024

0
Improved context-sensitive transformer model for inland vessel trajectory prediction
Kathrin Donandt, Karim Bottger, Dirk Soffker
Physics-related and model-based vessel trajectory prediction is highly accurate but requires specific knowledge of the vessel under consideration which is not always practical. Machine learning-based trajectory prediction models do not require expert knowledge, but rely on the implicit knowledge extracted from massive amounts of data. Several deep learning (DL) methods for vessel trajectory prediction have recently been suggested. The DL models developed typically only process information about the (dis)location of vessels defined with respect to a global reference system. In the context of inland navigation, this can be problematic, since without knowledge of the limited navigable space, irrealistic trajectories are likely to be determined. If spatial constraintes are introduced, e.g., by implementing an additional submodule to process map data, however, overall complexity increases. Instead of processing the vessel displacement information on the one hand and the spatial information on the other hand, the paper proposes the merging of both information. Here, fairway-related and navigation-related displacement information are used directly. In this way, the previously proposed context-sensitive Classification Transformer (CSCT) shows an improved spatial awareness. Additionally, the CSCT is adapted to assess the model uncertainty by enabling dropout during inference. This approach is trained on different inland waterways to analyze its generalizability. As the improved CSCT obtains lower prediction errors and enables to estimate the trustworthiness of each prediction, it is more suitable for safety-critical applications in inland navigation than previously developed models.
Read more6/6/2024

0
Incorporating Navigation Context into Inland Vessel Trajectory Prediction: A Gaussian Mixture Model and Transformer Approach
Kathrin Donandt, Dirk Soffker
Using data sources beyond the Automatic Identification System to represent the context a vessel is navigating in and consequently improve situation awareness is still rare in machine learning approaches to vessel trajectory prediction (VTP). In inland shipping, where vessel movement is constrained within fairways, navigational context information is indispensable. In this contribution targeting inland VTP, Gaussian Mixture Models (GMMs) are applied, on a fused dataset of AIS and discharge measurements, to generate multi-modal distribution curves, capturing typical lateral vessel positioning in the fairway and dislocation speeds along the waterway. By sampling the probability density curves of the GMMs, feature vectors are derived which are used, together with spatio-temporal vessel features and fairway geometries, as input to a VTP transformer model. The incorporation of these distribution features of both the current and forthcoming navigation context improves prediction accuracy. The superiority of the model over a previously proposed transformer model for inland VTP is shown. The novelty lies in the provision of preprocessed, statistics-based features representing the conditioned spatial context, rather than relying on the model to extract relevant features for the VTP task from contextual data. Oversimplification of the complexity of inland navigation patterns by assuming a single typical route or selecting specific clusters prior to model application is avoided by giving the model access to the entire distribution information. The methodology's generalizability is demonstrated through the usage of data of 3 distinct river sections. It can be integrated into an interaction-aware prediction framework, where insights into the positioning of the actual vessel behavior in the overall distribution at the current location and discharge can enhance trajectory prediction accuracy.
Read more6/6/2024

0
Outlier detection in maritime environments using AIS data and deep recurrent architectures
Constantine Maganaris, Eftychios Protopapadakis, Nikolaos Doulamis
A methodology based on deep recurrent models for maritime surveillance, over publicly available Automatic Identification System (AIS) data, is presented in this paper. The setup employs a deep Recurrent Neural Network (RNN)-based model, for encoding and reconstructing the observed ships' motion patterns. Our approach is based on a thresholding mechanism, over the calculated errors between observed and reconstructed motion patterns of maritime vessels. Specifically, a deep-learning framework, i.e. an encoder-decoder architecture, is trained using the observed motion patterns, enabling the models to learn and predict the expected trajectory, which will be compared to the effective ones. Our models, particularly the bidirectional GRU with recurrent dropouts, showcased superior performance in capturing the temporal dynamics of maritime data, illustrating the potential of deep learning to enhance maritime surveillance capabilities. Our work lays a solid foundation for future research in this domain, highlighting a path toward improved maritime safety through the innovative application of technology.
Read more6/17/2024