Increasing the Value of Information During Planning in Uncertain Environments

0

Sign in to get full access
Overview
- The research paper discusses methods to increase the value of information during planning in uncertain environments.
- It explores techniques to leverage additional information to improve decision-making in partially observable Markov decision processes (POMDPs).
- The paper presents new algorithms and theoretical guarantees to guide efficient information gathering and planning.
Plain English Explanation
The research paper focuses on how to make the most of available information when making decisions in uncertain situations. In many real-world scenarios, we don't have complete knowledge about the environment or the outcomes of our actions. This is known as a partially observable Markov decision process (POMDP).
The researchers develop new techniques to help agents, like robots or AI systems, gather and use information more effectively during the planning process. They introduce algorithms that can identify the most valuable information to collect and incorporate that into the decision-making process. This allows the agents to make better-informed choices and achieve their goals more reliably, even in highly uncertain environments.
The key innovation is finding ways to increase the value of information during planning. By strategically gathering and utilizing relevant data, the agents can improve their understanding of the situation and make more informed decisions. This can lead to better outcomes and more reliable performance, especially in long-horizon POMDPs where the effects of decisions compound over time.
Technical Explanation
The paper introduces new algorithms and theoretical results to address the challenge of planning under uncertainty. The researchers focus on partially observable Markov decision processes (POMDPs), which model situations where an agent has incomplete information about the current state of the environment.
The key technical contributions include:
-
Measurement Simplification: The researchers develop a method called Rho-POMDP that simplifies the measurement model in a POMDP to improve planning efficiency without sacrificing performance guarantees.
-
Information Gain Approximation: The paper introduces MEXGen, an algorithm that can effectively and efficiently approximate the information gain during planning, enabling more informed decision-making.
-
Belief State Planning: The researchers present BetaZero, a novel belief state planning algorithm that can handle long-horizon POMDPs by leveraging additional information sources.
Through a combination of new algorithmic techniques and theoretical analysis, the paper demonstrates how to increase the value of information during the planning process in uncertain environments. This can lead to more reliable and effective decision-making, with potential applications in areas such as robotics, autonomous systems, and decision support systems.
Critical Analysis
The paper provides a strong theoretical foundation and introduces several innovative algorithms to address the challenges of planning under uncertainty. The researchers have carefully designed the methods and provided formal performance guarantees, which is a valuable contribution to the field.
One potential limitation is the reliance on specific assumptions about the POMDP structure and the availability of certain types of information. In practice, real-world scenarios may not always fit these assumptions perfectly, and there could be additional sources of uncertainty or constraints that the paper does not address.
Additionally, the paper focuses primarily on the algorithmic and theoretical aspects, and does not provide extensive experimental evaluation or comparisons to other state-of-the-art approaches. While the theoretical analysis is rigorous, more empirical validation across diverse environments and applications would help demonstrate the practical impact of the proposed techniques.
Further research could explore the robustness of these methods to model misspecification, the integration with other planning and decision-making frameworks, and the scalability to larger and more complex problem instances. Exploring the potential trade-offs between information gathering, planning, and execution in dynamic environments could also be a fruitful direction for future work.
Conclusion
The research paper presents a significant contribution to the field of planning under uncertainty. By developing new algorithms and theoretical results to increase the value of information during planning, the researchers have provided a solid foundation for building more reliable and effective decision-making systems.
The techniques introduced in this paper, such as measurement simplification, information gain approximation, and belief state planning, have the potential to significantly improve the performance of autonomous agents and decision support systems operating in complex, uncertain environments. Further developments and real-world applications of these techniques could lead to transformative advances in fields such as robotics, logistics, healthcare, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Increasing the Value of Information During Planning in Uncertain Environments
Gaurab Pokharel
Prior studies have demonstrated that for many real-world problems, POMDPs can be solved through online algorithms both quickly and with near optimality. However, on an important set of problems where there is a large time delay between when the agent can gather information and when it needs to use that information, these solutions fail to adequately consider the value of information. As a result, information gathering actions, even when they are critical in the optimal policy, will be ignored by existing solutions, leading to sub-optimal decisions by the agent. In this research, we develop a novel solution that rectifies this problem by introducing a new algorithm that improves upon state-of-the-art online planning by better reflecting on the value of actions that gather information. We do this by adding Entropy to the UCB1 heuristic in the POMCP algorithm. We test this solution on the hallway problem. Results indicate that our new algorithm performs significantly better than POMCP.
Read more9/24/2024
❗
0
Informed POMDP: Leveraging Additional Information in Model-Based RL
Gaspard Lambrechts, Adrien Bolland, Damien Ernst
In this work, we generalize the problem of learning through interaction in a POMDP by accounting for eventual additional information available at training time. First, we introduce the informed POMDP, a new learning paradigm offering a clear distinction between the information at training and the observation at execution. Next, we propose an objective that leverages this information for learning a sufficient statistic of the history for the optimal control. We then adapt this informed objective to learn a world model able to sample latent trajectories. Finally, we empirically show a learning speed improvement in several environments using this informed world model in the Dreamer algorithm. These results and the simplicity of the proposed adaptation advocate for a systematic consideration of eventual additional information when learning in a POMDP using model-based RL.
Read more6/13/2024
0
Measurement Simplification in rho-POMDP with Performance Guarantees
Tom Yotam, Vadim Indelman
Decision making under uncertainty is at the heart of any autonomous system acting with imperfect information. The cost of solving the decision making problem is exponential in the action and observation spaces, thus rendering it unfeasible for many online systems. This paper introduces a novel approach to efficient decision-making, by partitioning the high-dimensional observation space. Using the partitioned observation space, we formulate analytical bounds on the expected information-theoretic reward, for general belief distributions. These bounds are then used to plan efficiently while keeping performance guarantees. We show that the bounds are adaptive, computationally efficient, and that they converge to the original solution. We extend the partitioning paradigm and present a hierarchy of partitioned spaces that allows greater efficiency in planning. We then propose a specific variant of these bounds for Gaussian beliefs and show a theoretical performance improvement of at least a factor of 4. Finally, we compare our novel method to other state of the art algorithms in active SLAM scenarios, in simulation and in real experiments. In both cases we show a significant speed-up in planning with performance guarantees.
Read more6/18/2024
0
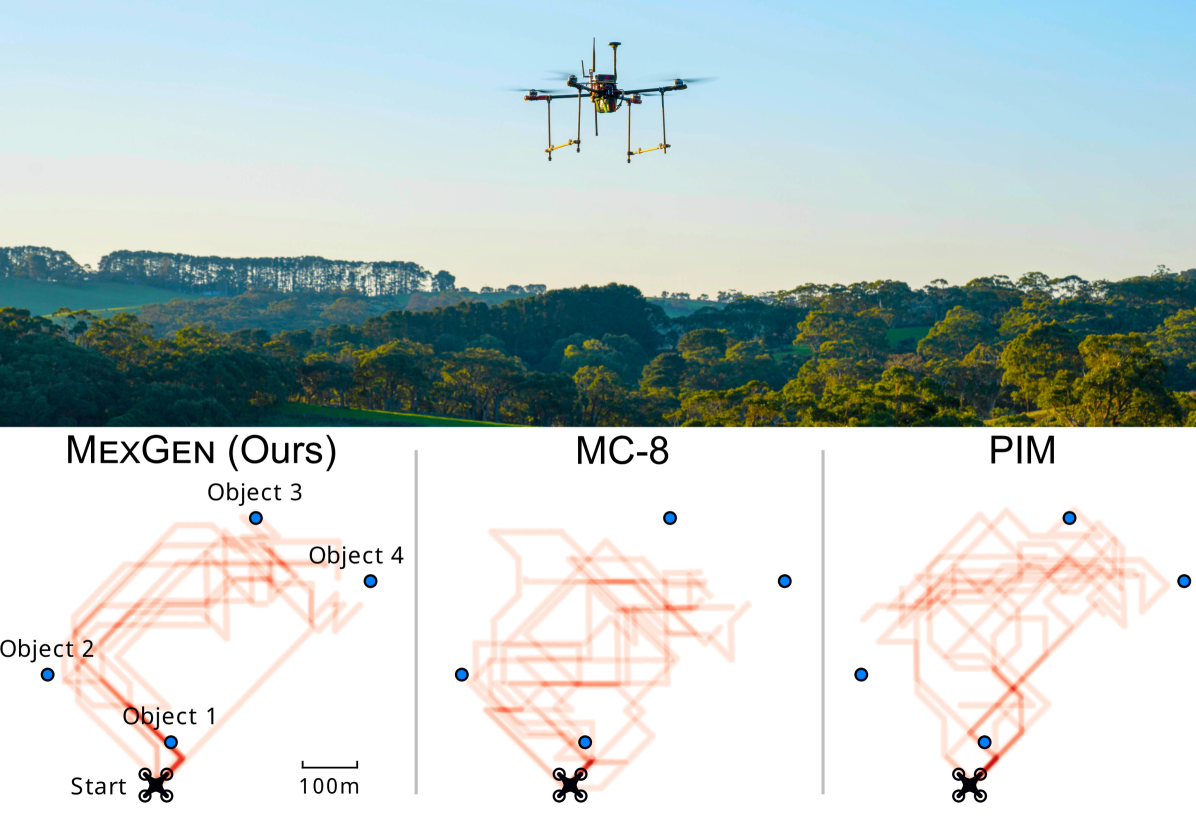
MEXGEN: An Effective and Efficient Information Gain Approximation for Information Gathering Path Planning
Joshua Chesser, Thuraiappah Sathyan, Damith C. Ranasinghe
Autonomous robots for gathering information on objects of interest has numerous real-world applications because of they improve efficiency, performance and safety. Realizing autonomy demands online planning algorithms to solve sequential decision making problems under uncertainty; because, objects of interest are often dynamic, object state, such as location is not directly observable and are obtained from noisy measurements. Such planning problems are notoriously difficult due to the combinatorial nature of predicting the future to make optimal decisions. For information theoretic planning algorithms, we develop a computationally efficient and effective approximation for the difficult problem of predicting the likely sensor measurements from uncertain belief states}. The approach more accurately predicts information gain from information gathering actions. Our theoretical analysis proves the proposed formulation achieves a lower prediction error than the current efficient-method. We demonstrate improved performance gains in radio-source tracking and localization problems using extensive simulated and field experiments with a multirotor aerial robot.
Read more5/7/2024