Deep Dive into Model-free Reinforcement Learning for Biological and Robotic Systems: Theory and Practice
2405.11457
0
0

Abstract
Animals and robots exist in a physical world and must coordinate their bodies to achieve behavioral objectives. With recent developments in deep reinforcement learning, it is now possible for scientists and engineers to obtain sensorimotor strategies (policies) for specific tasks using physically simulated bodies and environments. However, the utility of these methods goes beyond the constraints of a specific task; they offer an exciting framework for understanding the organization of an animal sensorimotor system in connection to its morphology and physical interaction with the environment, as well as for deriving general design rules for sensing and actuation in robotic systems. Algorithms and code implementing both learning agents and environments are increasingly available, but the basic assumptions and choices that go into the formulation of an embodied feedback control problem using deep reinforcement learning may not be immediately apparent. Here, we present a concise exposition of the mathematical and algorithmic aspects of model-free reinforcement learning, specifically through the use of textit{actor-critic} methods, as a tool for investigating the feedback control underlying animal and robotic behavior.
Create account to get full access
Overview
- This paper provides a deep dive into the theory and practice of model-free reinforcement learning (RL) for biological and robotic systems.
- It covers the mathematical underpinnings of model-free RL, the application of these techniques to biological and robotic systems, and a critical analysis of the state of the field.
- The paper explores how model-free RL can be leveraged to enable intelligent control and decision-making in complex, real-world environments without requiring explicit models of the system dynamics.
Plain English Explanation
Model-free reinforcement learning is a powerful approach for teaching machines and biological systems to make decisions and take actions in complex environments. Unlike traditional control methods that rely on detailed mathematical models of the system, model-free RL allows agents to learn optimal behaviors through trial-and-error interactions with their surroundings.
This paper delves into the core mathematical principles behind model-free RL and how they can be applied to control problems in biology and robotics. For example, Integrating Deep RL with Robust Low-Level Control for Robotic Manipulation describes how model-free RL can be combined with lower-level control algorithms to enable sophisticated robotic behaviors.
The key advantage of model-free RL is that it can handle highly uncertain, nonlinear, and high-dimensional environments where traditional modeling approaches struggle. By allowing the agent to learn directly from interactions with the real world or a simulated environment, model-free RL can discover effective strategies that may not be obvious from an explicit model of the system. This makes it a powerful tool for applications like Efficient Learning and Control Framework for Sim-to-Real Transfer where the real-world dynamics are difficult to capture in a model.
Technical Explanation
The paper begins by introducing the mathematical foundations of model-free reinforcement learning. It explains how RL agents can learn to make optimal decisions in sequential decision-making problems by estimating the long-term expected rewards of their actions, without requiring a model of the environment dynamics.
The authors then dive into the application of these model-free RL techniques to biological and robotic systems. For instance, they discuss how model-free RL can be used to not only optimize for rewards, but also satisfy constraints in complex control problems. They also explore integrating model-free RL with more traditional control algorithms, as described in Integrating Deep RL with Robust Low-Level Control for Robotic Manipulation, to leverage the strengths of both approaches.
The paper goes on to provide a critical analysis of the current state of the field. While model-free RL has shown promising results, the authors note that there are still significant challenges in scaling these techniques to real-world applications, particularly in terms of sample efficiency, safety, and interpretability. They discuss how model-based deep reinforcement learning approaches may help address some of these limitations by incorporating prior knowledge about the system dynamics.
Critical Analysis
The authors acknowledge several key limitations and areas for further research in the field of model-free RL for biological and robotic systems. One significant challenge is the sample inefficiency of many model-free RL algorithms, which can require an impractically large number of interactions with the environment to learn optimal behaviors. This can be a barrier to real-world deployment, especially in physical systems where exploration can be costly or dangerous.
The authors also note the importance of safety and robustness in these applications. Model-free RL agents may learn policies that perform well on average but exhibit undesirable or unsafe behavior in rare edge cases. Incorporating safety constraints and formal verification techniques, as discussed in Not Only Rewards, but Also Constraints: Applications of Constrained Optimization in Reinforcement Learning, will be crucial for deploying these systems in the real world.
Another area for improvement is the interpretability of model-free RL agents. The complex, black-box nature of many deep RL algorithms can make it challenging to understand and trust the decision-making processes of the agent. The authors suggest that incorporating more structured representations and priors, as in Model-Based Deep Reinforcement Learning for Accelerated Learning, may help address this issue and enable more transparent and accountable RL systems.
Conclusion
This paper provides a comprehensive overview of the theory and practice of model-free reinforcement learning for biological and robotic systems. It highlights the key advantages of this approach, such as its ability to learn effective behaviors in complex, uncertain environments without requiring explicit models. The paper also critically examines the current limitations of model-free RL and discusses promising directions for future research, such as integrating model-based techniques and addressing safety and interpretability concerns.
Overall, the insights and analysis presented in this paper contribute to the ongoing evolution of reinforcement learning as a powerful tool for enabling intelligent control and decision-making in a wide range of real-world applications, from robotics to neuroscience.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Imitation Game: A Model-based and Imitation Learning Deep Reinforcement Learning Hybrid
Eric MSP Veith, Torben Logemann, Aleksandr Berezin, Arlena Well{ss}ow, Stephan Balduin
0
0
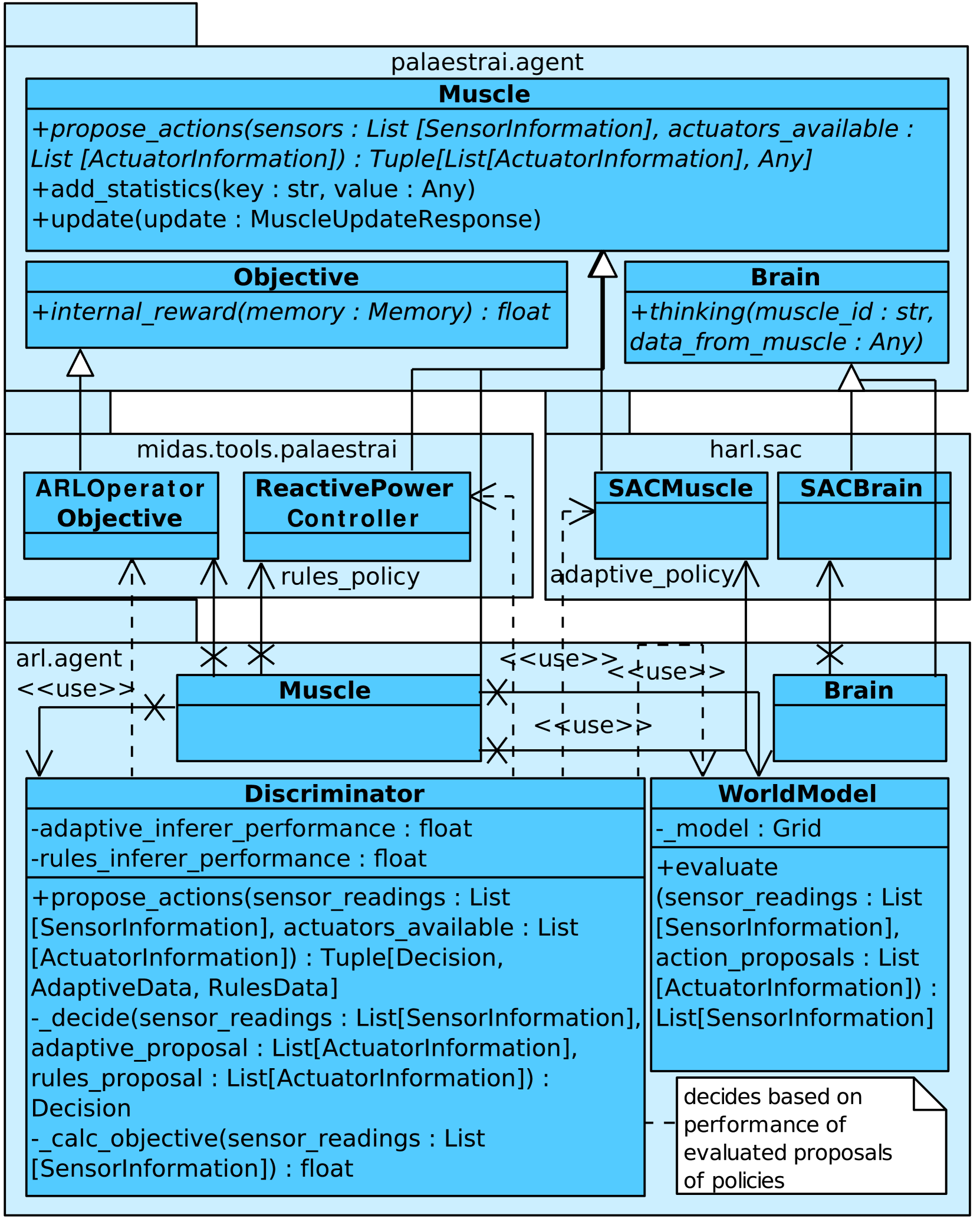
Autonomous and learning systems based on Deep Reinforcement Learning have firmly established themselves as a foundation for approaches to creating resilient and efficient Cyber-Physical Energy Systems. However, most current approaches suffer from two distinct problems: Modern model-free algorithms such as Soft Actor Critic need a high number of samples to learn a meaningful policy, as well as a fallback to ward against concept drifts (e. g., catastrophic forgetting). In this paper, we present the work in progress towards a hybrid agent architecture that combines model-based Deep Reinforcement Learning with imitation learning to overcome both problems.
4/3/2024
↗️
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
0
0
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
5/16/2024

Maximum diffusion reinforcement learning
Thomas A. Berrueta, Allison Pinosky, Todd D. Murphey
0
0
Robots and animals both experience the world through their bodies and senses. Their embodiment constrains their experiences, ensuring they unfold continuously in space and time. As a result, the experiences of embodied agents are intrinsically correlated. Correlations create fundamental challenges for machine learning, as most techniques rely on the assumption that data are independent and identically distributed. In reinforcement learning, where data are directly collected from an agent's sequential experiences, violations of this assumption are often unavoidable. Here, we derive a method that overcomes this issue by exploiting the statistical mechanics of ergodic processes, which we term maximum diffusion reinforcement learning. By decorrelating agent experiences, our approach provably enables single-shot learning in continuous deployments over the course of individual task attempts. Moreover, we prove our approach generalizes well-known maximum entropy techniques, and robustly exceeds state-of-the-art performance across popular benchmarks. Our results at the nexus of physics, learning, and control form a foundation for transparent and reliable decision-making in embodied reinforcement learning agents.
5/28/2024
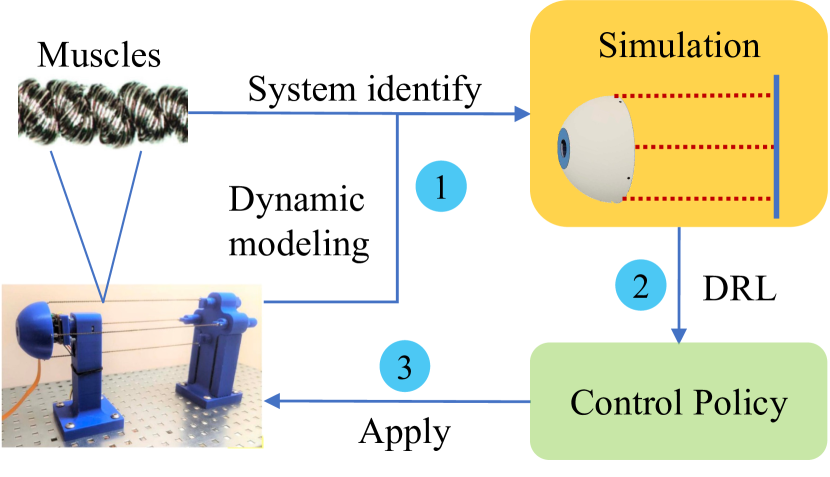
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024