Interpretable Concept Bottlenecks to Align Reinforcement Learning Agents

0

Sign in to get full access
Overview
- This paper explores the use of "concept bottlenecks" to align reinforcement learning agents with desired behaviors.
- The authors propose a method called "Successive Concept Bottleneck Agents" (ScoBots) that trains agents to learn and reason about high-level concepts, making their decision-making more interpretable.
- The paper includes experiments demonstrating the effectiveness of ScoBots in various environments, including navigation and multi-agent cooperation tasks.
Plain English Explanation
The researchers in this paper are trying to create AI agents that are more "interpretable" - meaning we can understand how they make decisions. They do this by training the agents to learn and reason about high-level "concepts" rather than just reacting to raw sensor data.
Imagine you're teaching a child to play a game. You might explain the key concepts they need to understand, like "scoring points" or "avoiding obstacles." An interpretable AI agent would be like a child who can explain their reasoning in those high-level terms, rather than just saying "I moved the joystick this way and that happened."
The specific approach the researchers used is called "Successive Concept Bottleneck Agents" (ScoBots). The idea is to force the agent to "compress" its decision-making through a "bottleneck" of these high-level concepts, making it more transparent. This helps the agent learn to make decisions in a way that aligns with our understanding of the task.
The researchers tested ScoBots in different environments, like navigating a maze or coordinating with other agents. The results showed that ScoBots can learn effective behaviors while also being more interpretable than traditional reinforcement learning agents.
Technical Explanation
The paper introduces "Successive Concept Bottleneck Agents" (ScoBots), a reinforcement learning framework that aims to create more interpretable agents by training them to reason about high-level "concepts."
The key innovation is the "concept bottleneck" - a neural network layer that forces the agent to compress its decision-making through a limited set of interpretable concepts. This encourages the agent to learn representations that align with human-understandable reasoning.
The ScoBots architecture consists of several components:
- Concept Encoder: Learns to map raw observations to a small set of concept activations.
- Policy Network: Learns to map the concept activations to actions, optimizing for the reward signal.
- Concept Consistency Regularizer: Encourages the concept activations to be interpretable and stable across time.
The authors evaluate ScoBots on a range of tasks, including navigation, multi-agent cooperation, and a custom "Concept Car" environment. They compare ScoBots to standard reinforcement learning baselines, demonstrating improved interpretability without sacrificing performance.
Critical Analysis
The paper presents a promising approach for creating more interpretable reinforcement learning agents. The use of concept bottlenecks is a clever way to encourage the agents to learn representations that align with human-understandable reasoning.
However, the paper does not explore the limitations of this approach in depth. For example, it's unclear how well ScoBots would scale to more complex or open-ended environments, where the relevant high-level concepts may be harder to define. Additionally, the paper does not address potential challenges in defining the appropriate set of concepts for a given task.
Further research is needed to better understand the tradeoffs between interpretability and performance, as well as the robustness of the concept bottleneck approach across a wider range of domains. Exploring the generalization capabilities of ScoBots and investigating methods for automatically discovering relevant concepts would be valuable avenues for future work.
Conclusion
This paper presents an innovative approach to creating more interpretable reinforcement learning agents through the use of "concept bottlenecks." The Successive Concept Bottleneck Agents (ScoBots) framework demonstrates the potential for training AI systems that can explain their decision-making in human-understandable terms, without sacrificing performance on a range of tasks.
While the paper provides promising initial results, further research is needed to fully understand the limitations and broader applicability of this approach. Nonetheless, the concept of leveraging high-level "concepts" to improve the interpretability of reinforcement learning agents is a significant step towards the development of more transparent and trustworthy AI systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Interpretable Concept Bottlenecks to Align Reinforcement Learning Agents
Quentin Delfosse, Sebastian Sztwiertnia, Mark Rothermel, Wolfgang Stammer, Kristian Kersting
Goal misalignment, reward sparsity and difficult credit assignment are only a few of the many issues that make it difficult for deep reinforcement learning (RL) agents to learn optimal policies. Unfortunately, the black-box nature of deep neural networks impedes the inclusion of domain experts for inspecting the model and revising suboptimal policies. To this end, we introduce *Successive Concept Bottleneck Agents* (SCoBots), that integrate consecutive concept bottleneck (CB) layers. In contrast to current CB models, SCoBots do not just represent concepts as properties of individual objects, but also as relations between objects which is crucial for many RL tasks. Our experimental results provide evidence of SCoBots' competitive performances, but also of their potential for domain experts to understand and regularize their behavior. Among other things, SCoBots enabled us to identify a previously unknown misalignment problem in the iconic video game, Pong, and resolve it. Overall, SCoBots thus result in more human-aligned RL agents. Our code is available at https://github.com/k4ntz/SCoBots .
Read more5/28/2024
0
Concept-Based Interpretable Reinforcement Learning with Limited to No Human Labels
Zhuorui Ye, Stephanie Milani, Geoffrey J. Gordon, Fei Fang
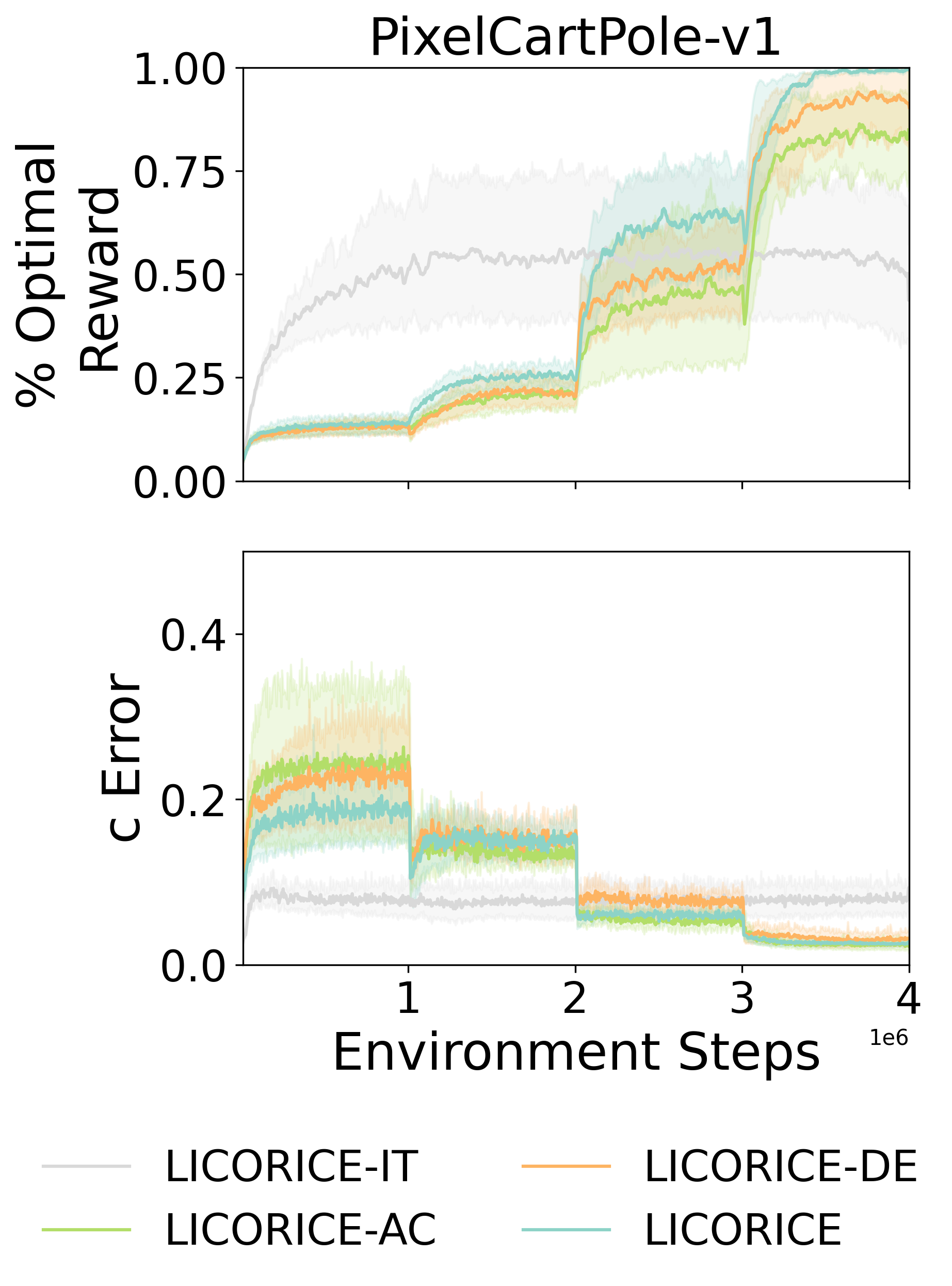
Recent advances in reinforcement learning (RL) have predominantly leveraged neural network-based policies for decision-making, yet these models often lack interpretability, posing challenges for stakeholder comprehension and trust. Concept bottleneck models offer an interpretable alternative by integrating human-understandable concepts into neural networks. However, a significant limitation in prior work is the assumption that human annotations for these concepts are readily available during training, necessitating continuous real-time input from human annotators. To overcome this limitation, we introduce a novel training scheme that enables RL algorithms to efficiently learn a concept-based policy by only querying humans to label a small set of data, or in the extreme case, without any human labels. Our algorithm, LICORICE, involves three main contributions: interleaving concept learning and RL training, using a concept ensembles to actively select informative data points for labeling, and decorrelating the concept data with a simple strategy. We show how LICORICE reduces manual labeling efforts to to 500 or fewer concept labels in three environments. Finally, we present an initial study to explore how we can use powerful vision-language models to infer concepts from raw visual inputs without explicit labels at minimal cost to performance.
Read more7/23/2024
0
Stochastic Concept Bottleneck Models
Moritz Vandenhirtz, Sonia Laguna, Riv{c}ards Marcinkeviv{c}s, Julia E. Vogt
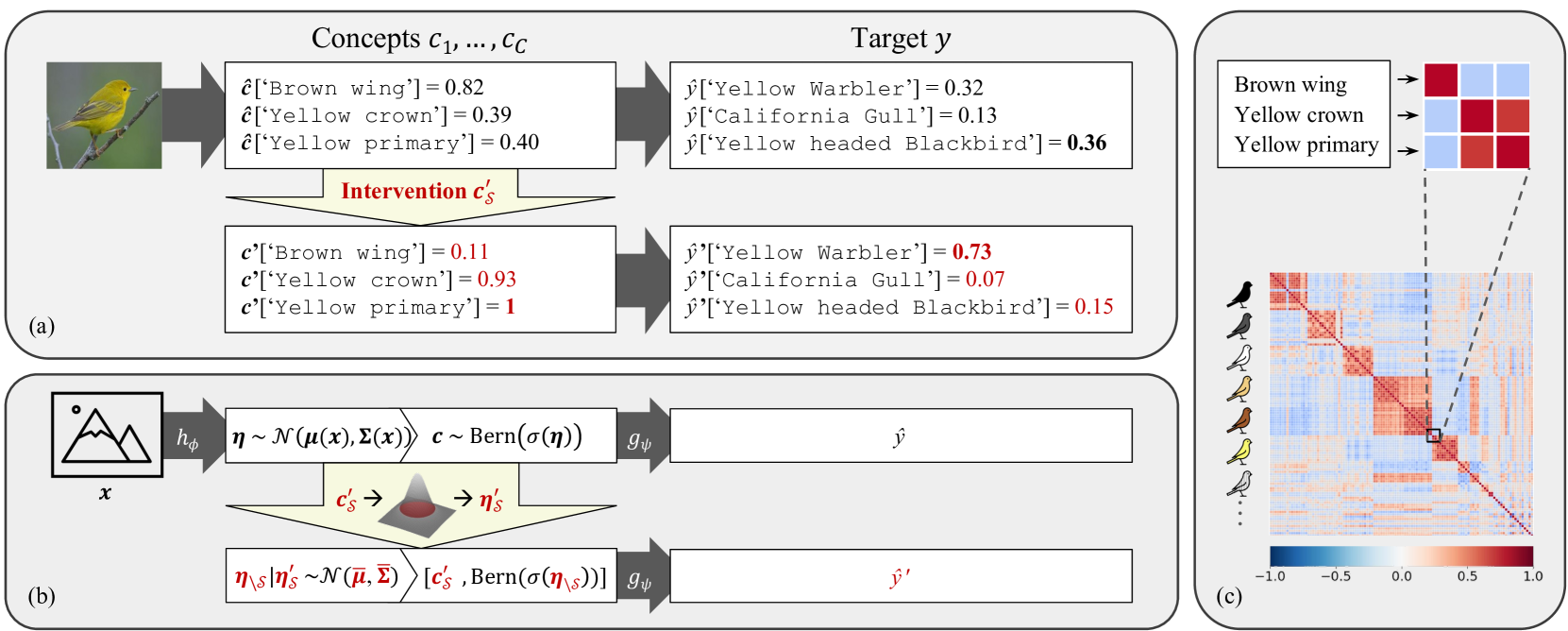
Concept Bottleneck Models (CBMs) have emerged as a promising interpretable method whose final prediction is based on intermediate, human-understandable concepts rather than the raw input. Through time-consuming manual interventions, a user can correct wrongly predicted concept values to enhance the model's downstream performance. We propose Stochastic Concept Bottleneck Models (SCBMs), a novel approach that models concept dependencies. In SCBMs, a single-concept intervention affects all correlated concepts, thereby improving intervention effectiveness. Unlike previous approaches that model the concept relations via an autoregressive structure, we introduce an explicit, distributional parameterization that allows SCBMs to retain the CBMs' efficient training and inference procedure. Additionally, we leverage the parameterization to derive an effective intervention strategy based on the confidence region. We show empirically on synthetic tabular and natural image datasets that our approach improves intervention effectiveness significantly. Notably, we showcase the versatility and usability of SCBMs by examining a setting with CLIP-inferred concepts, alleviating the need for manual concept annotations.
Read more6/28/2024
🌿
0
Coarse-to-Fine Concept Bottleneck Models
Konstantinos P. Panousis, Dino Ienco, Diego Marcos
Deep learning algorithms have recently gained significant attention due to their impressive performance. However, their high complexity and un-interpretable mode of operation hinders their confident deployment in real-world safety-critical tasks. This work targets ante hoc interpretability, and specifically Concept Bottleneck Models (CBMs). Our goal is to design a framework that admits a highly interpretable decision making process with respect to human understandable concepts, on two levels of granularity. To this end, we propose a novel two-level concept discovery formulation leveraging: (i) recent advances in vision-language models, and (ii) an innovative formulation for coarse-to-fine concept selection via data-driven and sparsity-inducing Bayesian arguments. Within this framework, concept information does not solely rely on the similarity between the whole image and general unstructured concepts; instead, we introduce the notion of concept hierarchy to uncover and exploit more granular concept information residing in patch-specific regions of the image scene. As we experimentally show, the proposed construction not only outperforms recent CBM approaches, but also yields a principled framework towards interpetability.
Read more6/28/2024