Interpretable Robotic Manipulation from Language

0

Sign in to get full access
Overview
- The paper "Interpretable Robotic Manipulation from Language" explores a novel approach to enable robots to understand and carry out complex manipulation tasks based on natural language instructions.
- The proposed system combines large language models with robotic control to allow for more interpretable and controllable robotic behaviors.
- Key aspects include grounding language to robot actions, generating interpretable policies, and transferring learned skills to new tasks and environments.
Plain English Explanation
The paper describes a way to help robots better understand and follow instructions given in plain language, rather than requiring highly specific and technical programming. The researchers developed a system that combines powerful language models, which are AI systems trained on vast amounts of text data to understand human language, with robotic control systems.
This allows the robots to take natural language instructions, like "pick up the red ball and place it on the table," and translate that into the specific actions needed to complete the task. The language model helps the robot understand the meaning and intent behind the instruction, while the robotic control system handles the low-level movements and mechanics required.
A key innovation is that this approach makes the robot's decision-making more interpretable and transparent to human users. Rather than just blindly executing commands, the robot can explain its reasoning and provide insight into why it chose certain actions. This could help build trust and make the robot's behavior more intuitive and predictable.
The researchers also showed that the skills learned by the system can be transferred to new tasks and environments, allowing the robot to adapt and apply its knowledge more broadly. Overall, this work represents an important step towards developing robots that can flexibly and intelligently interact with humans using natural language.
Technical Explanation
The paper presents a framework for "Interpretable Robotic Manipulation from Language", which combines large language models with robotic control to enable more intuitive and controllable robotic behaviors.
The key components include:
- Language Grounding: The system maps natural language instructions to a sequence of robot actions and states, allowing the robot to understand the intent behind the instructions.
- Policy Generation: A policy module generates interpretable robot control policies from the language understanding, enabling the robot to execute the task.
- Skill Transfer: The learned policies and skills can be transferred to new tasks and environments, allowing for broader applicability.
The researchers evaluate their approach on a range of manipulation tasks, including pick-and-place, stacking, and tool use. They show that the system can follow natural language instructions to complete the tasks, while also providing explanations for its actions that enhance interpretability.
Importantly, the paper also explores techniques for "Learning Manipulation Skills through Robot Chain-of-Thought" and "Reasoning about Grasping via Multimodal Large Language Models", which further improve the system's ability to learn and generalize manipulation skills from language.
Critical Analysis
The paper presents a compelling approach for enabling more intuitive and controllable robotic manipulation through language understanding. The key strengths are the system's ability to ground language to robot actions, generate interpretable policies, and transfer learned skills to new tasks.
However, the paper also acknowledges several limitations and areas for further research. For example, the language grounding is currently limited to a relatively narrow set of task descriptions, and the policy generation relies on hand-crafted templates. Extending the language understanding capabilities and learning more flexible policy representations could further improve the system's versatility.
Additionally, while the paper demonstrates the system's interpretability through action explanations, more work is needed to fully understand the internal reasoning process and ensure the system's decisions are aligned with user intent. Techniques like "Embodied Agents for Efficient Exploration and Smart Scene Description" could be leveraged to enhance the robot's situational awareness and decision-making.
Finally, the current evaluation is limited to relatively simple manipulation tasks, and scaling the system to more complex, real-world scenarios remains an open challenge. "Incremental Learning of Humanoid Robot Behavior from Natural Language" may offer insights into addressing this.
Overall, the paper presents a promising step towards more intuitive and interpretable robotic manipulation, but there is still significant work to be done to fully realize the potential of this approach.
Conclusion
The "Interpretable Robotic Manipulation from Language" paper introduces an innovative framework that combines large language models and robotic control to enable robots to understand and execute complex manipulation tasks based on natural language instructions.
By grounding language to robot actions, generating interpretable policies, and transferring learned skills, the system represents an important advancement in making robotic behaviors more intuitive and controllable for human users. While the current work has some limitations, the core ideas and techniques presented in the paper could have significant implications for the field of human-robot interaction and the development of more capable, user-friendly robotic systems.
As the capabilities of language models and robotic control systems continue to progress, this research suggests that we may be able to create robots that can flexibly and intelligently assist humans using natural communication, opening up new possibilities for seamless human-robot collaboration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Interpretable Robotic Manipulation from Language
Boyuan Zheng, Jianlong Zhou, Fang Chen
Humans naturally employ linguistic instructions to convey knowledge, a process that proves significantly more complex for machines, especially within the context of multitask robotic manipulation environments. Natural language, moreover, serves as the primary medium through which humans acquire new knowledge, presenting a potentially intuitive bridge for translating concepts understandable by humans into formats that can be learned by machines. In pursuit of facilitating this integration, we introduce an explainable behavior cloning agent, named Ex-PERACT, specifically designed for manipulation tasks. This agent is distinguished by its hierarchical structure, which incorporates natural language to enhance the learning process. At the top level, the model is tasked with learning a discrete skill code, while at the bottom level, the policy network translates the problem into a voxelized grid and maps the discretized actions to voxel grids. We evaluate our method across eight challenging manipulation tasks utilizing the RLBench benchmark, demonstrating that Ex-PERACT not only achieves competitive policy performance but also effectively bridges the gap between human instructions and machine execution in complex environments.
Read more5/28/2024
0
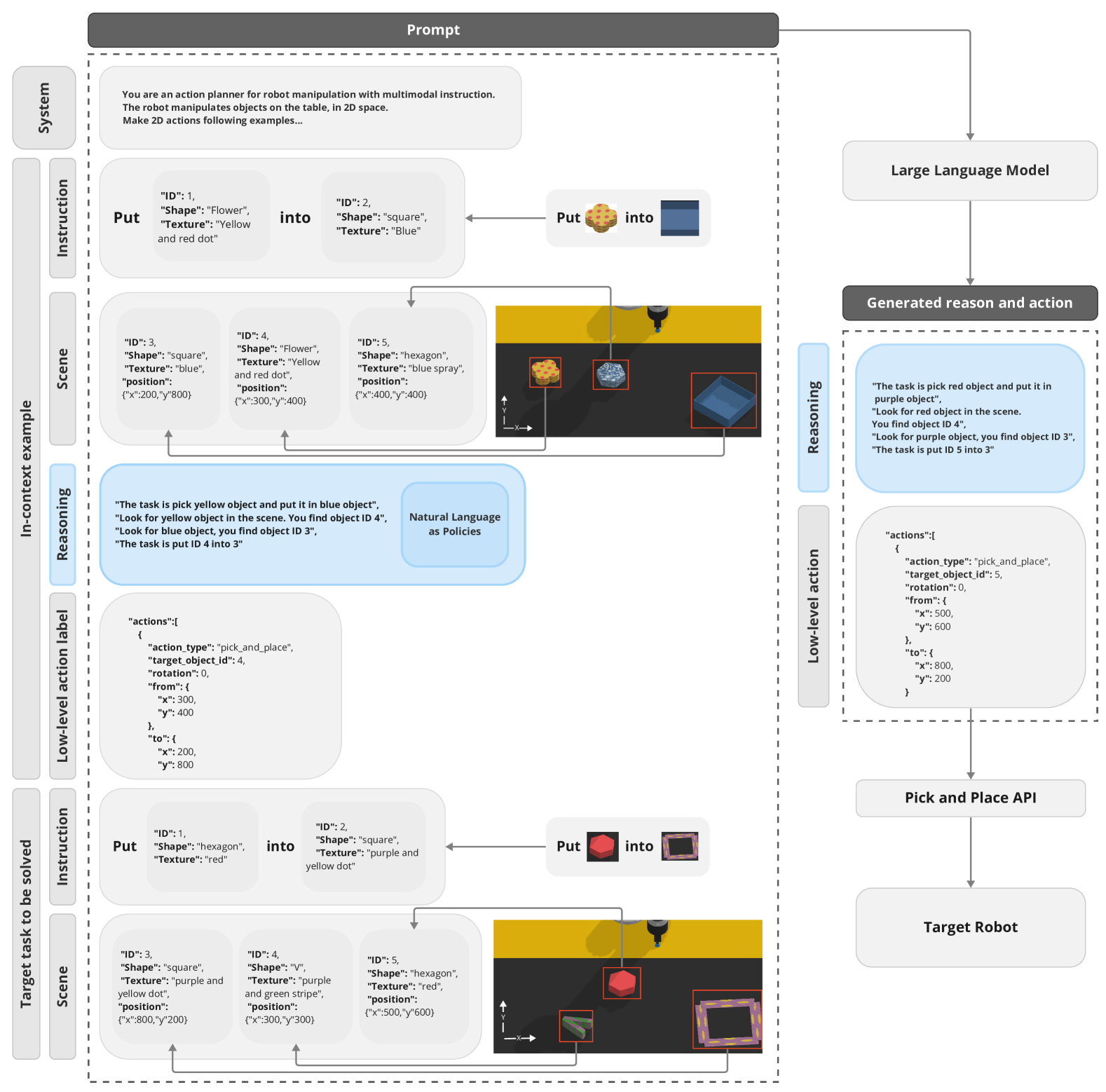
Natural Language as Policies: Reasoning for Coordinate-Level Embodied Control with LLMs
Yusuke Mikami, Andrew Melnik, Jun Miura, Ville Hautamaki
We demonstrate experimental results with LLMs that address robotics task planning problems. Recently, LLMs have been applied in robotics task planning, particularly using a code generation approach that converts complex high-level instructions into mid-level policy codes. In contrast, our approach acquires text descriptions of the task and scene objects, then formulates task planning through natural language reasoning, and outputs coordinate level control commands, thus reducing the necessity for intermediate representation code as policies with pre-defined APIs. Our approach is evaluated on a multi-modal prompt simulation benchmark, demonstrating that our prompt engineering experiments with natural language reasoning significantly enhance success rates compared to its absence. Furthermore, our approach illustrates the potential for natural language descriptions to transfer robotics skills from known tasks to previously unseen tasks. The project website: https://natural-language-as-policies.github.io/
Read more4/9/2024
🛠️
0
Learning Manipulation Skills through Robot Chain-of-Thought with Sparse Failure Guidance
Kaifeng Zhang, Zhao-Heng Yin, Weirui Ye, Yang Gao
Defining reward functions for skill learning has been a long-standing challenge in robotics. Recently, vision-language models (VLMs) have shown promise in defining reward signals for teaching robots manipulation skills. However, existing works often provide reward guidance that is too coarse, leading to inefficient learning processes. In this paper, we address this issue by implementing more fine-grained reward guidance. We decompose tasks into simpler sub-tasks, using this decomposition to offer more informative reward guidance with VLMs. We also propose a VLM-based self imitation learning process to speed up learning. Empirical evidence demonstrates that our algorithm consistently outperforms baselines such as CLIP, LIV, and RoboCLIP. Specifically, our algorithm achieves a $5.4 times$ higher average success rate compared to the best baseline, RoboCLIP, across a series of manipulation tasks.
Read more6/4/2024

0
Contrastive Imitation Learning for Language-guided Multi-Task Robotic Manipulation
Teli Ma, Jiaming Zhou, Zifan Wang, Ronghe Qiu, Junwei Liang
Developing robots capable of executing various manipulation tasks, guided by natural language instructions and visual observations of intricate real-world environments, remains a significant challenge in robotics. Such robot agents need to understand linguistic commands and distinguish between the requirements of different tasks. In this work, we present Sigma-Agent, an end-to-end imitation learning agent for multi-task robotic manipulation. Sigma-Agent incorporates contrastive Imitation Learning (contrastive IL) modules to strengthen vision-language and current-future representations. An effective and efficient multi-view querying Transformer (MVQ-Former) for aggregating representative semantic information is introduced. Sigma-Agent shows substantial improvement over state-of-the-art methods under diverse settings in 18 RLBench tasks, surpassing RVT by an average of 5.2% and 5.9% in 10 and 100 demonstration training, respectively. Sigma-Agent also achieves 62% success rate with a single policy in 5 real-world manipulation tasks. The code will be released upon acceptance.
Read more6/17/2024