Interpreting and learning voice commands with a Large Language Model for a robot system

0

Sign in to get full access
Overview
- This paper explores how a Large Language Model (LLM) can be used to interpret and learn voice commands for a robot system.
- The researchers developed a conversational system that allows a user to interact with a robot using natural language voice commands.
- The system leverages the language understanding capabilities of an LLM to interpret the user's intent and translate it into actions for the robot to execute.
Plain English Explanation
The researchers in this paper looked at how a powerful language AI model called a Large Language Model (LLM) could be used to help a robot understand and carry out voice commands from a human user. They built a conversational system that lets the user talk to the robot using natural language, and the LLM is able to interpret what the user is trying to say and translate that into actions the robot can perform.
This allows the robot to respond to more open-ended, conversational commands from the user, rather than just a limited set of pre-programmed voice commands. The LLM gives the robot more flexibility and language understanding capabilities to engage in more natural, human-like interactions.
Technical Explanation
The researchers developed a conversational system that integrates an LLM to enable a robot to understand and execute voice commands from a human user. The system takes the user's spoken input, transcribes it to text, and then passes it through the LLM to interpret the semantic meaning and intent behind the command.
The LLM is trained on a large corpus of natural language data, which allows it to understand the nuances and context of the user's request, even if it is expressed in an open-ended or ambiguous way. The system then translates the interpreted intent into the appropriate actions for the robot to perform.
This approach allows the robot to engage in more flexible, human-like interactions compared to a system relying on pre-programmed voice commands. The LLM's language understanding capabilities enable the robot to adapt to a wider range of user inputs and fulfill more complex requests.
Critical Analysis
The paper demonstrates the potential of LLMs to enhance human-robot interaction by enabling more natural, conversational control of robots. However, the research also acknowledges some limitations and areas for further exploration.
For example, the paper notes that the current system is limited to a specific set of robot actions and capabilities. Expanding the robot's physical abilities and the range of tasks it can perform would require further development and integration with the LLM.
Additionally, the paper suggests that more research is needed to ensure the system's robustness and reliability, particularly in handling ambiguous or unclear user commands. Improving the LLM's ability to resolve context and clarify user intent could help address these challenges.
Conclusion
This research showcases how LLMs can be leveraged to create more intuitive and natural interfaces for controlling robots through voice commands. By tapping into the language understanding capabilities of LLMs, the system allows users to interact with robots in a more conversational and flexible manner, rather than being limited to a predefined set of voice commands.
While the current implementation has some limitations, the findings suggest that further advancements in this area could lead to significant improvements in human-robot interaction, making robots more accessible and responsive to the needs and preferences of users. As LLMs continue to evolve, the potential for more natural and intuitive robot control systems is likely to grow.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Interpreting and learning voice commands with a Large Language Model for a robot system
Stanislau Stankevich, Wojciech Dudek
Robots are increasingly common in industry and daily life, such as in nursing homes where they can assist staff. A key challenge is developing intuitive interfaces for easy communication. The use of Large Language Models (LLMs) like GPT-4 has enhanced robot capabilities, allowing for real-time interaction and decision-making. This integration improves robots' adaptability and functionality. This project focuses on merging LLMs with databases to improve decision-making and enable knowledge acquisition for request interpretation problems.
Read more8/1/2024
💬
0
A Survey on Integration of Large Language Models with Intelligent Robots
Yeseung Kim, Dohyun Kim, Jieun Choi, Jisang Park, Nayoung Oh, Daehyung Park
In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
Read more8/16/2024
💬
0
Large Language Models for Human-Robot Interaction: Opportunities and Risks
Jesse Atuhurra
The tremendous development in large language models (LLM) has led to a new wave of innovations and applications and yielded research results that were initially forecast to take longer. In this work, we tap into these recent developments and present a meta-study about the potential of large language models if deployed in social robots. We place particular emphasis on the applications of social robots: education, healthcare, and entertainment. Before being deployed in social robots, we also study how these language models could be safely trained to ``understand'' societal norms and issues, such as trust, bias, ethics, cognition, and teamwork. We hope this study provides a resourceful guide to other robotics researchers interested in incorporating language models in their robots.
Read more5/3/2024
0
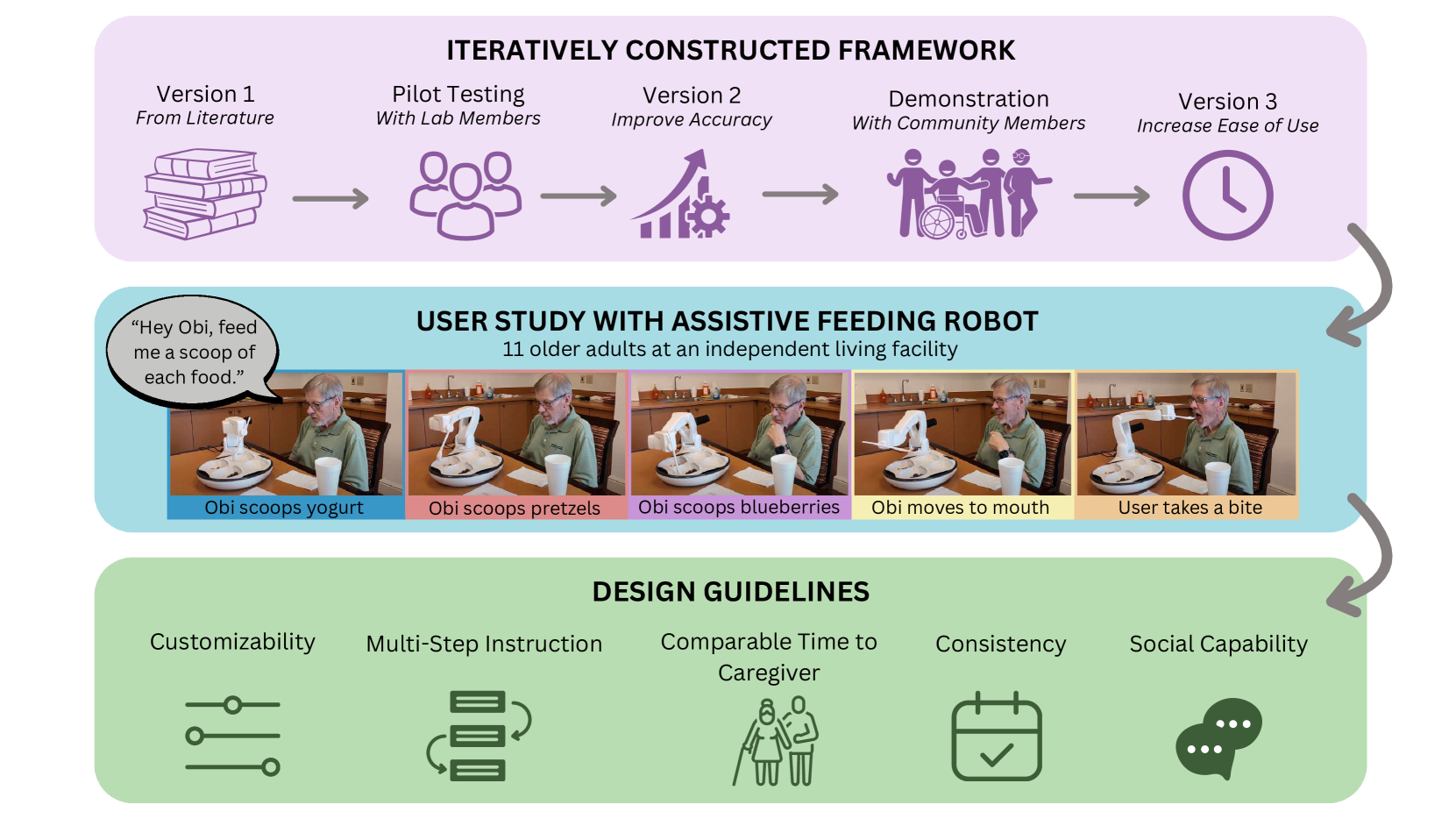
VoicePilot: Harnessing LLMs as Speech Interfaces for Physically Assistive Robots
Akhil Padmanabha, Jessie Yuan, Janavi Gupta, Zulekha Karachiwalla, Carmel Majidi, Henny Admoni, Zackory Erickson
Physically assistive robots present an opportunity to significantly increase the well-being and independence of individuals with motor impairments or other forms of disability who are unable to complete activities of daily living. Speech interfaces, especially ones that utilize Large Language Models (LLMs), can enable individuals to effectively and naturally communicate high-level commands and nuanced preferences to robots. Frameworks for integrating LLMs as interfaces to robots for high level task planning and code generation have been proposed, but fail to incorporate human-centric considerations which are essential while developing assistive interfaces. In this work, we present a framework for incorporating LLMs as speech interfaces for physically assistive robots, constructed iteratively with 3 stages of testing involving a feeding robot, culminating in an evaluation with 11 older adults at an independent living facility. We use both quantitative and qualitative data from the final study to validate our framework and additionally provide design guidelines for using LLMs as speech interfaces for assistive robots. Videos and supporting files are located on our project website: https://sites.google.com/andrew.cmu.edu/voicepilot/
Read more7/18/2024