IntervenGen: Interventional Data Generation for Robust and Data-Efficient Robot Imitation Learning
2405.01472
0
0
📊
Abstract
Imitation learning is a promising paradigm for training robot control policies, but these policies can suffer from distribution shift, where the conditions at evaluation time differ from those in the training data. A popular approach for increasing policy robustness to distribution shift is interactive imitation learning (i.e., DAgger and variants), where a human operator provides corrective interventions during policy rollouts. However, collecting a sufficient amount of interventions to cover the distribution of policy mistakes can be burdensome for human operators. We propose IntervenGen (I-Gen), a novel data generation system that can autonomously produce a large set of corrective interventions with rich coverage of the state space from a small number of human interventions. We apply I-Gen to 4 simulated environments and 1 physical environment with object pose estimation error and show that it can increase policy robustness by up to 39x with only 10 human interventions. Videos and more results are available at https://sites.google.com/view/intervengen2024.
Create account to get full access
Overview
- Imitation learning is a way to train robot control policies, but these policies can struggle when the conditions at evaluation time differ from the training data.
- Interactive imitation learning, where a human operator provides corrections during policy rollouts, is a popular approach for increasing policy robustness to distribution shift.
- However, collecting enough human interventions to cover the distribution of policy mistakes can be burdensome.
- The paper proposes IntervenGen (I-Gen), a system that can autonomously produce a large set of corrective interventions to increase policy robustness with only a small number of human interventions.
Plain English Explanation
Robots can learn to perform tasks by imitating human behavior, a process called imitation learning. However, the robots' performance can suffer when the real-world conditions differ from the ones they were trained on. To address this, researchers have developed interactive imitation learning, where a human operator steps in to correct the robot's actions during training. This helps the robot learn to handle a wider range of situations.
The challenge is that the human operator has to provide a lot of corrections to cover all the possible mistakes the robot might make. IntervenGen (I-Gen) solves this problem by automatically generating a large number of simulated corrections based on a small set of human-provided interventions. This allows the robot to learn robustness to distribution shift with much less effort from the human.
The paper tests I-Gen on several simulated environments and a physical environment with object pose estimation errors. They show that I-Gen can increase the robot's policy robustness by up to 39 times compared to standard interactive imitation learning, using only 10 human interventions. This makes interactive imitation learning much more practical and scalable for real-world robot training.
Technical Explanation
The paper proposes IntervenGen (I-Gen), a novel data generation system that can autonomously produce a large set of corrective interventions to increase policy robustness in imitation learning. This addresses the challenge that collecting a sufficient number of human interventions to cover the distribution of policy mistakes can be burdensome.
I-Gen works by learning a generative model of corrective interventions from a small set of human-provided interventions. It then uses this model to autonomously generate additional synthetic interventions that cover a wide range of the state space where the policy makes mistakes. The authors apply I-Gen to 4 simulated environments and 1 physical environment with object pose estimation error, showing that it can increase policy robustness by up to 39x with only 10 human interventions.
This builds on prior work in interactive imitation learning, such as DAgger and its variants, which aim to improve policy robustness by having a human operator provide corrective feedback during training. However, I-Gen addresses the scalability challenge of these approaches by automating the generation of interventions.
The authors also compare I-Gen to other data augmentation techniques, such as MEGA-DAgger and Improving Generalization in Game Agents, showing that I-Gen outperforms these methods on the evaluated tasks.
Critical Analysis
The paper provides a promising solution to the distribution shift problem in imitation learning by automating the generation of corrective interventions. The extensive evaluation across multiple simulated and physical environments demonstrates the versatility and effectiveness of the I-Gen approach.
One potential limitation is that the quality and diversity of the synthetic interventions generated by I-Gen may be dependent on the quality and coverage of the initial set of human interventions. If the human-provided interventions do not sufficiently capture the breadth of the policy's mistakes, the generative model may not be able to produce high-quality synthetic interventions. Further research could explore methods to assess the adequacy of the initial human interventions and provide guidance on the minimum required set.
Additionally, while the paper shows strong performance improvements, it would be valuable to understand the computational and memory requirements of running I-Gen, as well as the training time needed to learn the generative model. These practical considerations may impact the feasibility of deploying I-Gen in real-world robotic systems with limited resources.
Overall, IntervenGen (I-Gen) represents an important step forward in making interactive imitation learning more scalable and practical. The ability to autonomously generate a diverse set of corrective interventions has the potential to significantly reduce the burden on human operators and enable more robust robot control policies.
Conclusion
The paper presents IntervenGen (I-Gen), a novel data generation system that can autonomously produce a large set of corrective interventions to increase the robustness of imitation learning policies to distribution shift. By learning a generative model of interventions from a small set of human-provided examples, I-Gen can dramatically reduce the effort required from human operators while still achieving substantial improvements in policy performance.
The extensive evaluation across multiple simulated and physical environments demonstrates the effectiveness of I-Gen, with up to 39x increases in policy robustness using only 10 human interventions. This breakthrough has the potential to make interactive imitation learning much more scalable and practical for real-world robotic applications, where dealing with distribution shift is a critical challenge.
Overall, the IntervenGen (I-Gen) system represents an important advancement in the field of imitation learning, with promising implications for improving the safety, reliability, and versatility of autonomous robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
RoboGen: Towards Unleashing Infinite Data for Automated Robot Learning via Generative Simulation
Yufei Wang, Zhou Xian, Feng Chen, Tsun-Hsuan Wang, Yian Wang, Katerina Fragkiadaki, Zackory Erickson, David Held, Chuang Gan
0
0
We present RoboGen, a generative robotic agent that automatically learns diverse robotic skills at scale via generative simulation. RoboGen leverages the latest advancements in foundation and generative models. Instead of directly using or adapting these models to produce policies or low-level actions, we advocate for a generative scheme, which uses these models to automatically generate diversified tasks, scenes, and training supervisions, thereby scaling up robotic skill learning with minimal human supervision. Our approach equips a robotic agent with a self-guided propose-generate-learn cycle: the agent first proposes interesting tasks and skills to develop, and then generates corresponding simulation environments by populating pertinent objects and assets with proper spatial configurations. Afterwards, the agent decomposes the proposed high-level task into sub-tasks, selects the optimal learning approach (reinforcement learning, motion planning, or trajectory optimization), generates required training supervision, and then learns policies to acquire the proposed skill. Our work attempts to extract the extensive and versatile knowledge embedded in large-scale models and transfer them to the field of robotics. Our fully generative pipeline can be queried repeatedly, producing an endless stream of skill demonstrations associated with diverse tasks and environments.
6/18/2024
🛸
DiffGen: Robot Demonstration Generation via Differentiable Physics Simulation, Differentiable Rendering, and Vision-Language Model
Yang Jin, Jun Lv, Shuqiang Jiang, Cewu Lu
0
0
Generating robot demonstrations through simulation is widely recognized as an effective way to scale up robot data. Previous work often trained reinforcement learning agents to generate expert policies, but this approach lacks sample efficiency. Recently, a line of work has attempted to generate robot demonstrations via differentiable simulation, which is promising but heavily relies on reward design, a labor-intensive process. In this paper, we propose DiffGen, a novel framework that integrates differentiable physics simulation, differentiable rendering, and a vision-language model to enable automatic and efficient generation of robot demonstrations. Given a simulated robot manipulation scenario and a natural language instruction, DiffGen can generate realistic robot demonstrations by minimizing the distance between the embedding of the language instruction and the embedding of the simulated observation after manipulation. The embeddings are obtained from the vision-language model, and the optimization is achieved by calculating and descending gradients through the differentiable simulation, differentiable rendering, and vision-language model components, thereby accomplishing the specified task. Experiments demonstrate that with DiffGen, we could efficiently and effectively generate robot data with minimal human effort or training time.
5/14/2024
📊
Not Just Pretty Pictures: Toward Interventional Data Augmentation Using Text-to-Image Generators
Jianhao Yuan, Francesco Pinto, Adam Davies, Philip Torr
0
0
Neural image classifiers are known to undergo severe performance degradation when exposed to inputs that are sampled from environmental conditions that differ from their training data. Given the recent progress in Text-to-Image (T2I) generation, a natural question is how modern T2I generators can be used to simulate arbitrary interventions over such environmental factors in order to augment training data and improve the robustness of downstream classifiers. We experiment across a diverse collection of benchmarks in single domain generalization (SDG) and reducing reliance on spurious features (RRSF), ablating across key dimensions of T2I generation, including interventional prompting strategies, conditioning mechanisms, and post-hoc filtering. Our extensive empirical findings demonstrate that modern T2I generators like Stable Diffusion can indeed be used as a powerful interventional data augmentation mechanism, outperforming previously state-of-the-art data augmentation techniques regardless of how each dimension is configured.
6/5/2024
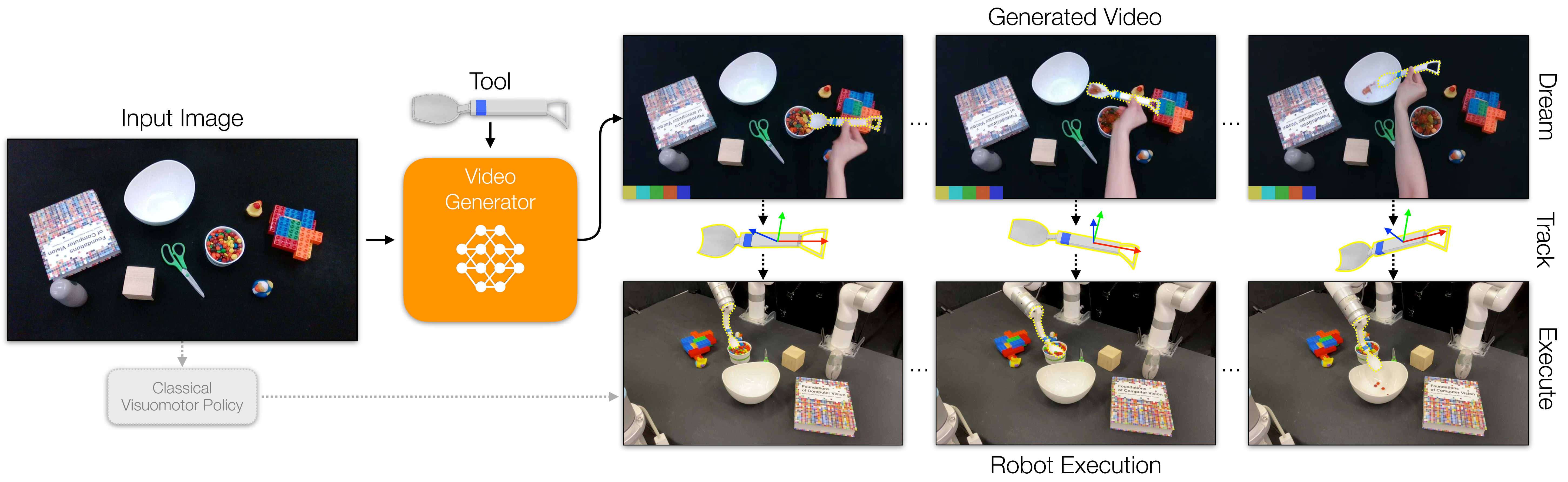
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
0
0
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
6/26/2024