Invisible Optical Adversarial Stripes on Traffic Sign against Autonomous Vehicles

0

Sign in to get full access
Overview
- This paper explores how invisible optical adversarial stripes on traffic signs can be used to attack autonomous vehicles.
- The researchers demonstrate that by exploiting the rolling shutter effect of CMOS camera sensors, they can create subtle patterns that can cause autonomous vehicles to misclassify or fail to detect traffic signs.
- The proposed attack is low-cost, easily implementable, and can be made invisible to the human eye, posing a significant threat to the safety of autonomous driving systems.
Plain English Explanation
Autonomous vehicles, like self-driving cars, use cameras and computer vision algorithms to detect and recognize important things on the road, like traffic signs. This paper shows how attackers can take advantage of a technical limitation in how those cameras work to trick the car into misinterpreting traffic signs.
The key idea is that most modern camera sensors use a "rolling shutter" that scans the image line-by-line rather than capturing the whole image at once. This means that different parts of the image are captured at slightly different times. Attackers can create carefully designed patterns of stripes on traffic signs that exploit this effect, causing the sign to appear distorted or even unrecognizable to the car's vision system.
Importantly, these adversarial stripes can be made nearly invisible to the human eye, so a driver might not even notice them. But the car's computer would interpret the sign incorrectly, which could be very dangerous. The researchers demonstrate that this attack can be implemented cheaply and easily, posing a serious threat to the safety of self-driving vehicles.
Technical Explanation
The researchers leverage the rolling shutter effect of CMOS camera sensors commonly used in autonomous vehicles. This effect causes different parts of the image to be captured at slightly different times, which the researchers exploit to create adversarial patterns on traffic signs.
Specifically, they design a set of invisible optical adversarial stripes that, when applied to a traffic sign, cause the sign to appear distorted or unrecognizable to the vehicle's computer vision system. These adversarial stripes are generated using an optimization process that accounts for the rolling shutter effect and can be made nearly invisible to the human eye.
The team demonstrates the effectiveness of this attack through experiments on both simulated and real-world autonomous driving systems. They show that the adversarial stripes can cause dynamic adversarial attacks that lead to consistent misclassification or non-detection of traffic signs, even when the vehicle is in motion.
The researchers also explore strategies for adversarial 3D virtual patches that can be used to optimize the appearance of the adversarial stripes and make them more effective. Additionally, they investigate methods for optimizing the visibility of traffic signs and lights to counteract the adversarial attack.
Critical Analysis
The researchers present a compelling demonstration of a significant vulnerability in autonomous driving systems. The proposed attack is low-cost, easily implementable, and difficult to detect, making it a serious threat to the safety of self-driving vehicles.
However, the paper does not fully address the potential countermeasures that could be developed to mitigate this type of attack. For example, multi-view black-box physical attacks could be used to detect and neutralize the adversarial stripes, and advanced computer vision techniques may be able to overcome the limitations of the rolling shutter effect.
Additionally, the researchers only test their attack on a limited set of autonomous driving systems, and it's unclear how well the attack would generalize to other platforms or in more complex real-world environments. Further research is needed to fully understand the broader implications and potential solutions for this type of adversarial attack.
Conclusion
This paper highlights a significant vulnerability in autonomous driving systems that could be exploited by bad actors to create dangerous situations on the road. The researchers demonstrate a novel attack that leverages the rolling shutter effect of CMOS camera sensors to create invisible adversarial patterns on traffic signs, causing autonomous vehicles to misclassify or fail to detect them.
While the proposed attack is a concerning security threat, the research also opens up new avenues for developing more robust and secure computer vision systems for autonomous driving. Addressing these types of vulnerabilities will be crucial for ensuring the safety and reliability of self-driving technology as it continues to advance.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Invisible Optical Adversarial Stripes on Traffic Sign against Autonomous Vehicles
Dongfang Guo, Yuting Wu, Yimin Dai, Pengfei Zhou, Xin Lou, Rui Tan
Camera-based computer vision is essential to autonomous vehicle's perception. This paper presents an attack that uses light-emitting diodes and exploits the camera's rolling shutter effect to create adversarial stripes in the captured images to mislead traffic sign recognition. The attack is stealthy because the stripes on the traffic sign are invisible to human. For the attack to be threatening, the recognition results need to be stable over consecutive image frames. To achieve this, we design and implement GhostStripe, an attack system that controls the timing of the modulated light emission to adapt to camera operations and victim vehicle movements. Evaluated on real testbeds, GhostStripe can stably spoof the traffic sign recognition results for up to 94% of frames to a wrong class when the victim vehicle passes the road section. In reality, such attack effect may fool victim vehicles into life-threatening incidents. We discuss the countermeasures at the levels of camera sensor, perception model, and autonomous driving system.
Read more7/11/2024

0
Infrared Adversarial Car Stickers
Xiaopei Zhu, Yuqiu Liu, Zhanhao Hu, Jianmin Li, Xiaolin Hu
Infrared physical adversarial examples are of great significance for studying the security of infrared AI systems that are widely used in our lives such as autonomous driving. Previous infrared physical attacks mainly focused on 2D infrared pedestrian detection which may not fully manifest its destructiveness to AI systems. In this work, we propose a physical attack method against infrared detectors based on 3D modeling, which is applied to a real car. The goal is to design a set of infrared adversarial stickers to make cars invisible to infrared detectors at various viewing angles, distances, and scenes. We build a 3D infrared car model with real infrared characteristics and propose an infrared adversarial pattern generation method based on 3D mesh shadow. We propose a 3D control points-based mesh smoothing algorithm and use a set of smoothness loss functions to enhance the smoothness of adversarial meshes and facilitate the sticker implementation. Besides, We designed the aluminum stickers and conducted physical experiments on two real Mercedes-Benz A200L cars. Our adversarial stickers hid the cars from Faster RCNN, an object detector, at various viewing angles, distances, and scenes. The attack success rate (ASR) was 91.49% for real cars. In comparison, the ASRs of random stickers and no sticker were only 6.21% and 0.66%, respectively. In addition, the ASRs of the designed stickers against six unseen object detectors such as YOLOv3 and Deformable DETR were between 73.35%-95.80%, showing good transferability of the attack performance across detectors.
Read more5/17/2024
0
Secure Traffic Sign Recognition: An Attention-Enabled Universal Image Inpainting Mechanism against Light Patch Attacks
Hangcheng Cao, Longzhi Yuan, Guowen Xu, Ziyang He, Zhengru Fang, Yuguang Fang
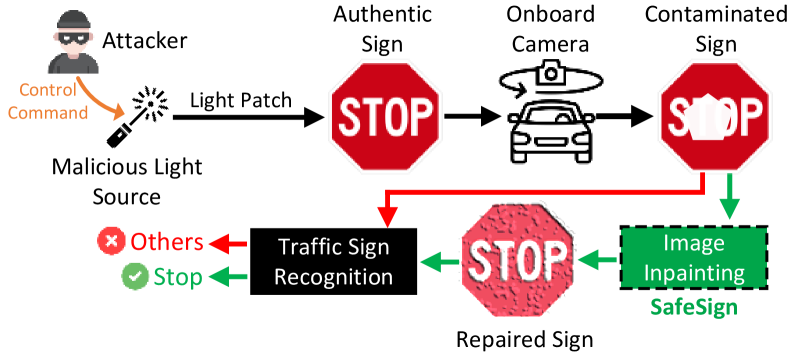
Traffic sign recognition systems play a crucial role in assisting drivers to make informed decisions while driving. However, due to the heavy reliance on deep learning technologies, particularly for future connected and autonomous driving, these systems are susceptible to adversarial attacks that pose significant safety risks to both personal and public transportation. Notably, researchers recently identified a new attack vector to deceive sign recognition systems: projecting well-designed adversarial light patches onto traffic signs. In comparison with traditional adversarial stickers or graffiti, these emerging light patches exhibit heightened aggression due to their ease of implementation and outstanding stealthiness. To effectively counter this security threat, we propose a universal image inpainting mechanism, namely, SafeSign. It relies on attention-enabled multi-view image fusion to repair traffic signs contaminated by adversarial light patches, thereby ensuring the accurate sign recognition. Here, we initially explore the fundamental impact of malicious light patches on the local and global feature spaces of authentic traffic signs. Then, we design a binary mask-based U-Net image generation pipeline outputting diverse contaminated sign patterns, to provide our image inpainting model with needed training data. Following this, we develop an attention mechanism-enabled neural network to jointly utilize the complementary information from multi-view images to repair contaminated signs. Finally, extensive experiments are conducted to evaluate SafeSign's effectiveness in resisting potential light patch-based attacks, bringing an average accuracy improvement of 54.8% in three widely-used sign recognition models
Read more9/9/2024
0
Dynamic Adversarial Attacks on Autonomous Driving Systems
Amirhosein Chahe, Chenan Wang, Abhishek Jeyapratap, Kaidi Xu, Lifeng Zhou
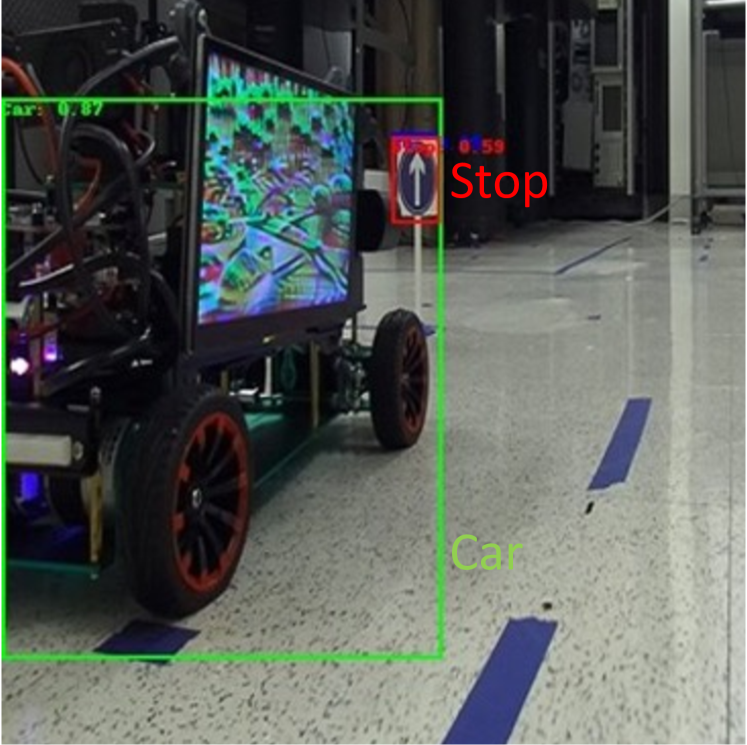
This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Read more5/16/2024