Is That Rain? Understanding Effects on Visual Odometry Performance for Autonomous UAVs and Efficient DNN-based Rain Classification at the Edge

0

Sign in to get full access
Overview
- This paper explores the impact of rainy conditions on the performance of visual odometry systems used for autonomous navigation of UAVs (unmanned aerial vehicles).
- It also presents an efficient deep neural network (DNN)-based approach for classifying rain conditions at the edge, enabling real-time adaptation of the visual odometry system.
Plain English Explanation
The paper focuses on two key challenges faced by autonomous UAVs operating in rainy conditions. <a href="https://aimodels.fyi/papers/arxiv/evaluating-visual-odometry-methods-autonomous-driving-rain">Visual odometry</a> is a technique used by UAVs to estimate their position and orientation based on visual cues from on-board cameras. However, rain can significantly impact the performance of visual odometry systems, leading to navigation errors and potential safety issues.
To address this, the researchers investigate the effects of rain on visual odometry and develop an efficient <a href="https://aimodels.fyi/papers/arxiv/real-time-environment-condition-classification-autonomous-vehicles">DNN-based rain classification system</a> that can run on the UAV's onboard hardware. This allows the visual odometry system to adapt its algorithms in real-time to maintain reliable navigation in rainy conditions.
The key innovation is the ability to detect rain conditions using a lightweight DNN model that can be deployed directly on the UAV, without the need for an external cloud-based processing infrastructure. This enables the system to make rapid adjustments to the visual odometry algorithms as the weather conditions change, improving the overall robustness and reliability of autonomous UAV navigation.
Technical Explanation
The paper first presents a detailed analysis of the impact of rain on visual odometry performance. Through experiments using a publicly available <a href="https://aimodels.fyi/papers/arxiv/uav-rain1k-benchmark-raindrop-removal-from-uav">UAV rain dataset</a>, the researchers quantify the degradation in pose estimation accuracy under varying rain conditions.
To address this challenge, the paper introduces a DNN-based rain classification model that can be efficiently deployed on the UAV's onboard hardware. The model is designed to be <a href="https://aimodels.fyi/papers/arxiv/robust-adas-enhancing-robustness-machine-learning-based">lightweight and robust</a>, allowing it to operate in real-time and adapt the visual odometry algorithms accordingly.
The researchers evaluate the rain classification model on a diverse set of test scenarios, demonstrating its ability to accurately detect rain conditions even under varying lighting, camera viewpoints, and rain intensity. This enables the visual odometry system to dynamically adjust its algorithms to maintain reliable navigation in the face of changing environmental conditions.
Critical Analysis
The paper provides a comprehensive analysis of the impact of rain on visual odometry performance and presents a practical solution to mitigate these challenges. However, the research is limited to simulated rain conditions, and further validation may be needed to assess the system's performance in real-world, uncontrolled rainy environments.
Additionally, the paper does not address potential edge cases, such as the impact of heavy rain, fog, or other adverse weather conditions on the proposed system. Investigating the robustness of the DNN-based rain classification model in more diverse and extreme weather scenarios could be an area for future research.
While the authors demonstrate the efficiency of their approach, the paper could have provided more insight into the computational and power requirements of the onboard DNN model, as these factors are critical for the practical deployment of such systems on resource-constrained UAV platforms.
Conclusion
This paper presents a significant contribution to the field of autonomous UAV navigation by addressing the impact of rain on visual odometry performance. The proposed DNN-based rain classification system, which can be efficiently deployed on the UAV's onboard hardware, enables real-time adaptation of the visual odometry algorithms to maintain reliable navigation in rainy conditions.
The research highlights the importance of developing robust and adaptive perception systems for autonomous vehicles operating in dynamic and unpredictable environments. As the use of UAVs in various applications continues to grow, the insights and techniques presented in this paper can help improve the safety and reliability of autonomous aerial navigation, particularly in challenging weather conditions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Is That Rain? Understanding Effects on Visual Odometry Performance for Autonomous UAVs and Efficient DNN-based Rain Classification at the Edge
Andrea Albanese, Yanran Wang, Davide Brunelli, David Boyle
The development of safe and reliable autonomous unmanned aerial vehicles relies on the ability of the system to recognise and adapt to changes in the local environment based on sensor inputs. State-of-the-art local tracking and trajectory planning are typically performed using camera sensor input to the flight control algorithm, but the extent to which environmental disturbances like rain affect the performance of these systems is largely unknown. In this paper, we first describe the development of an open dataset comprising ~335k images to examine these effects for seven different classes of precipitation conditions and show that a worst-case average tracking error of 1.5 m is possible for a state-of-the-art visual odometry system (VINS-Fusion). We then use the dataset to train a set of deep neural network models suited to mobile and constrained deployment scenarios to determine the extent to which it may be possible to efficiently and accurately classify these `rainy' conditions. The most lightweight of these models (MobileNetV3 small) can achieve an accuracy of 90% with a memory footprint of just 1.28 MB and a frame rate of 93 FPS, which is suitable for deployment in resource-constrained and latency-sensitive systems. We demonstrate a classification latency in the order of milliseconds using typical flight computer hardware. Accordingly, such a model can feed into the disturbance estimation component of an autonomous flight controller. In addition, data from unmanned aerial vehicles with the ability to accurately determine environmental conditions in real time may contribute to developing more granular timely localised weather forecasting.
Read more7/18/2024
🧪
0
Evaluating Visual Odometry Methods for Autonomous Driving in Rain
Yu Xiang Tan, Marcel Bartholomeus Prasetyo, Mohammad Alif Daffa, Deshpande Sunny Nitin, Malika Meghjani
The increasing demand for autonomous vehicles has created a need for robust navigation systems that can also operate effectively in adverse weather conditions. Visual odometry is a technique used in these navigation systems, enabling the estimation of vehicle position and motion using input from onboard cameras. However, visual odometry accuracy can be significantly impacted in challenging weather conditions, such as heavy rain, snow, or fog. In this paper, we evaluate a range of visual odometry methods, including our DROID-SLAM based heuristic approach. Specifically, these algorithms are tested on both clear and rainy weather urban driving data to evaluate their robustness. We compiled a dataset comprising of a range of rainy weather conditions from different cities. This includes, the Oxford Robotcar dataset from Oxford, the 4Seasons dataset from Munich and an internal dataset collected in Singapore. We evaluated different visual odometry algorithms for both monocular and stereo camera setups using the Absolute Trajectory Error (ATE). From the range of approaches evaluated, our findings suggest that the Depth and Flow for Visual Odometry (DF-VO) algorithm with monocular setup performed the best for short range distances (< 500m) and our proposed DROID-SLAM based heuristic approach for the stereo setup performed relatively well for long-term localization. Both VO algorithms suggested a need for a more robust sensor fusion based approach for localization in rain.
Read more5/6/2024
0
Robust Vehicle Localization and Tracking in Rain using Street Maps
Yu Xiang Tan, Malika Meghjani
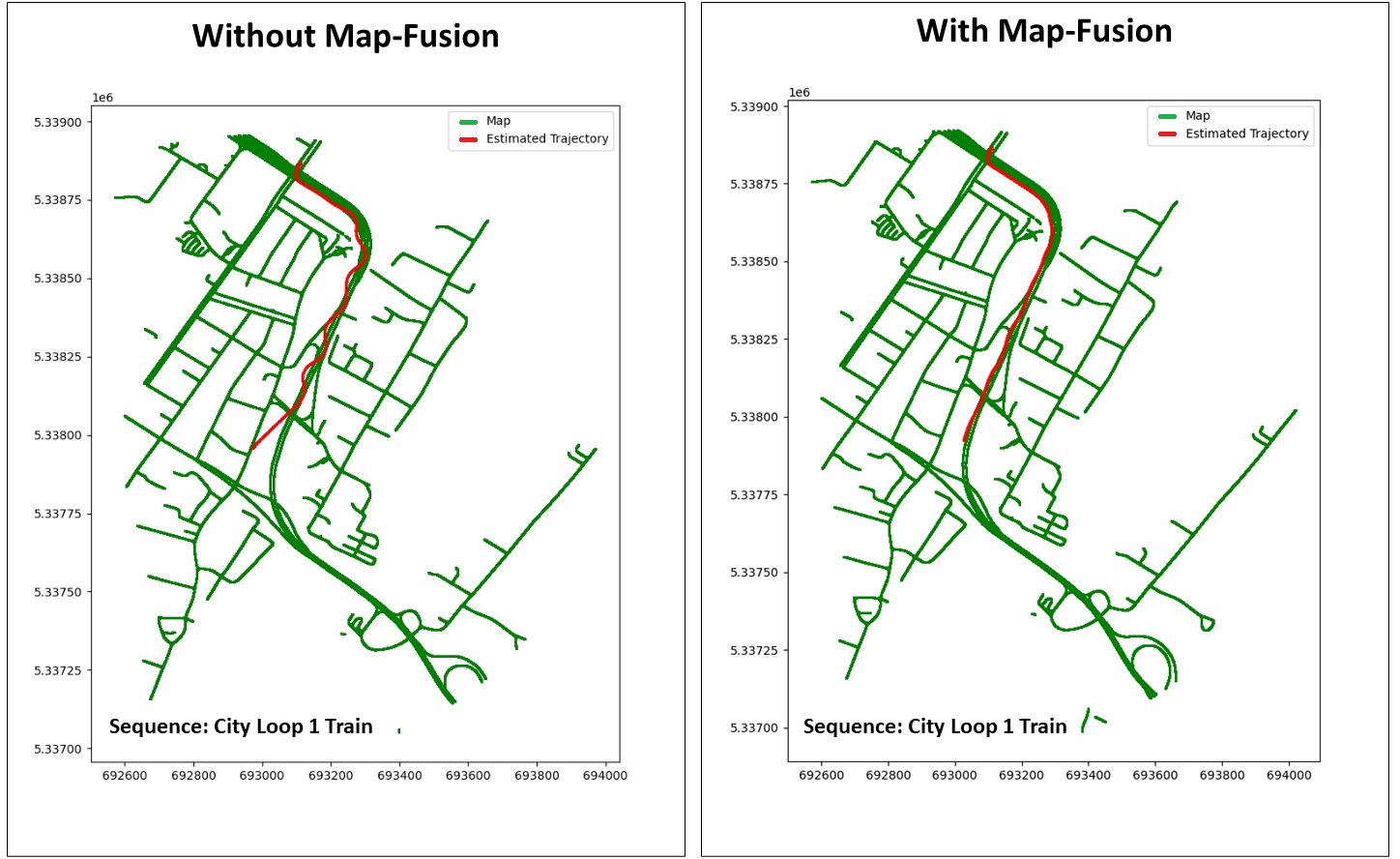
GPS-based vehicle localization and tracking suffers from unstable positional information commonly experienced in tunnel segments and in dense urban areas. Also, both Visual Odometry (VO) and Visual Inertial Odometry (VIO) are susceptible to adverse weather conditions that causes occlusions or blur on the visual input. In this paper, we propose a novel approach for vehicle localization that uses street network based map information to correct drifting odometry estimates and intermittent GPS measurements especially, in adversarial scenarios such as driving in rain and tunnels. Specifically, our approach is a flexible fusion algorithm that integrates intermittent GPS, drifting IMU and VO estimates together with 2D map information for robust vehicle localization and tracking. We refer to our approach as Map-Fusion. We robustly evaluate our proposed approach on four geographically diverse datasets from different countries ranging across clear and rain weather conditions. These datasets also include challenging visual segments in tunnels and underpasses. We show that with the integration of the map information, our Map-Fusion algorithm reduces the error of the state-of-the-art VO and VIO approaches across all datasets. We also validate our proposed algorithm in a real-world environment and in real-time on a hardware constrained mobile robot. Map-Fusion achieved 2.46m error in clear weather and 6.05m error in rain weather for a 150m route.
Read more9/4/2024

0
Real-Time Environment Condition Classification for Autonomous Vehicles
Marco Introvigne, Andrea Ramazzina, Stefanie Walz, Dominik Scheuble, Mario Bijelic
Current autonomous driving technologies are being rolled out in geo-fenced areas with well-defined operation conditions such as time of operation, area, weather conditions and road conditions. In this way, challenging conditions as adverse weather, slippery road or densely-populated city centers can be excluded. In order to lift the geo-fenced restriction and allow a more dynamic availability of autonomous driving functions, it is necessary for the vehicle to autonomously perform an environment condition assessment in real time to identify when the system cannot operate safely and either stop operation or require the resting passenger to take control. In particular, adverse-weather challenges are a fundamental limitation as sensor performance degenerates quickly, prohibiting the use of sensors such as cameras to locate and monitor road signs, pedestrians or other vehicles. To address this issue, we train a deep learning model to identify outdoor weather and dangerous road conditions, enabling a quick reaction to new situations and environments. We achieve this by introducing an improved taxonomy and label hierarchy for a state-of-the-art adverse-weather dataset, relabelling it with a novel semi-automated labeling pipeline. Using the novel proposed dataset and hierarchy, we train RECNet, a deep learning model for the classification of environment conditions from a single RGB frame. We outperform baseline models by relative 16% in F1- Score, while maintaining a real-time capable performance of 20 Hz.
Read more5/30/2024