Evaluating Visual Odometry Methods for Autonomous Driving in Rain

0
🧪
Sign in to get full access
Overview
- The paper evaluates the performance of various visual odometry algorithms, which are used in autonomous vehicle navigation systems, in adverse weather conditions like heavy rain.
- The researchers compiled a dataset of rainy weather conditions from different cities and tested the algorithms on both clear and rainy weather data.
- The findings suggest that the Depth and Flow for Visual Odometry (DF-VO) algorithm with a monocular setup performed best for short-range distances, while the DROID-SLAM based heuristic approach for stereo setups performed relatively well for long-term localization.
- Both algorithms indicate the need for a more robust sensor fusion approach for vehicle localization in rainy conditions.
Plain English Explanation
Autonomous vehicles, such as self-driving cars, rely on advanced navigation systems to determine their position and movement. One key component of these systems is visual odometry, which uses information from onboard cameras to estimate the vehicle's location and motion. However, the accuracy of visual odometry can be severely impacted by challenging weather conditions, like heavy rain, snow, or fog.
To address this issue, the researchers in this paper evaluated various visual odometry algorithms, including their own DROID-SLAM based approach, in both clear and rainy weather. They compiled a dataset from multiple cities, including Oxford, Munich, and Singapore, to test the algorithms' performance.
The findings suggest that the DF-VO algorithm with a single camera (monocular) setup performed best for short-range distances, while the researchers' DROID-SLAM based approach for stereo camera setups was relatively effective for longer-term localization. However, both algorithms indicated a need for a more advanced, sensor fusion-based approach to improve vehicle localization in rainy conditions.
Technical Explanation
The paper evaluates the performance of various visual odometry algorithms in adverse weather conditions, specifically heavy rain. Visual odometry is a crucial component of autonomous vehicle navigation systems, enabling the estimation of vehicle position and motion using input from onboard cameras.
The researchers compiled a comprehensive dataset of rainy weather driving data from different cities, including the Oxford Robotcar dataset, the 4Seasons dataset from Munich, and an internal dataset collected in Singapore. This dataset allowed them to evaluate the performance of various visual odometry algorithms, including their own DROID-SLAM based heuristic approach, in both clear and rainy weather conditions.
The algorithms were tested using the Absolute Trajectory Error (ATE) metric, which measures the accuracy of the estimated vehicle trajectory compared to ground truth data. The findings suggest that the Depth and Flow for Visual Odometry (DF-VO) algorithm with a monocular camera setup performed the best for short-range distances (less than 500 meters), while the researchers' DROID-SLAM based heuristic approach for stereo camera setups performed relatively well for long-term localization.
Critical Analysis
The paper provides a comprehensive evaluation of visual odometry algorithms in adverse weather conditions, which is crucial for the development of robust autonomous vehicle navigation systems. The researchers' efforts in compiling a diverse dataset of rainy weather driving data from multiple cities is commendable, as it allows for a more thorough and representative assessment of the algorithms' performance.
However, the paper does not delve deeply into the specific reasons why certain algorithms performed better than others in rainy conditions. A more detailed analysis of the underlying factors, such as the algorithms' sensitivity to noise, their ability to handle reduced visibility, or their robustness to changes in camera calibration, could have provided additional insights.
Furthermore, the paper suggests the need for a more robust sensor fusion approach to improve vehicle localization in rainy conditions. While this is a valid observation, the paper does not provide any concrete proposals or directions for developing such a sensor fusion framework. Exploring potential sensor combinations (e.g., cameras, LiDAR, radar) and the challenges associated with their integration could have strengthened the paper's contributions.
Despite these limitations, the paper's findings and the researchers' dataset compilation efforts are valuable contributions to the field of autonomous vehicle navigation, particularly in the context of adverse weather conditions. The insights provided can inform the development of more robust and reliable visual odometry algorithms, ultimately contributing to the advancement of autonomous driving technology.
Conclusion
This paper evaluates the performance of various visual odometry algorithms in adverse weather conditions, specifically heavy rain. The researchers compiled a comprehensive dataset of rainy weather driving data from multiple cities and tested the algorithms' accuracy using the Absolute Trajectory Error (ATE) metric.
The key findings suggest that the Depth and Flow for Visual Odometry (DF-VO) algorithm with a monocular camera setup performed the best for short-range distances, while the researchers' DROID-SLAM based heuristic approach for stereo camera setups performed relatively well for long-term localization. However, both algorithms indicated the need for a more robust sensor fusion-based approach to improve vehicle localization in rainy conditions.
These findings contribute to the ongoing efforts to develop reliable and accurate autonomous vehicle navigation systems that can operate effectively in challenging weather conditions. The insights provided in this paper can guide future research and development in this field, ultimately enhancing the safety and performance of self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Evaluating Visual Odometry Methods for Autonomous Driving in Rain
Yu Xiang Tan, Marcel Bartholomeus Prasetyo, Mohammad Alif Daffa, Deshpande Sunny Nitin, Malika Meghjani
The increasing demand for autonomous vehicles has created a need for robust navigation systems that can also operate effectively in adverse weather conditions. Visual odometry is a technique used in these navigation systems, enabling the estimation of vehicle position and motion using input from onboard cameras. However, visual odometry accuracy can be significantly impacted in challenging weather conditions, such as heavy rain, snow, or fog. In this paper, we evaluate a range of visual odometry methods, including our DROID-SLAM based heuristic approach. Specifically, these algorithms are tested on both clear and rainy weather urban driving data to evaluate their robustness. We compiled a dataset comprising of a range of rainy weather conditions from different cities. This includes, the Oxford Robotcar dataset from Oxford, the 4Seasons dataset from Munich and an internal dataset collected in Singapore. We evaluated different visual odometry algorithms for both monocular and stereo camera setups using the Absolute Trajectory Error (ATE). From the range of approaches evaluated, our findings suggest that the Depth and Flow for Visual Odometry (DF-VO) algorithm with monocular setup performed the best for short range distances (< 500m) and our proposed DROID-SLAM based heuristic approach for the stereo setup performed relatively well for long-term localization. Both VO algorithms suggested a need for a more robust sensor fusion based approach for localization in rain.
Read more5/6/2024
0
Robust Vehicle Localization and Tracking in Rain using Street Maps
Yu Xiang Tan, Malika Meghjani
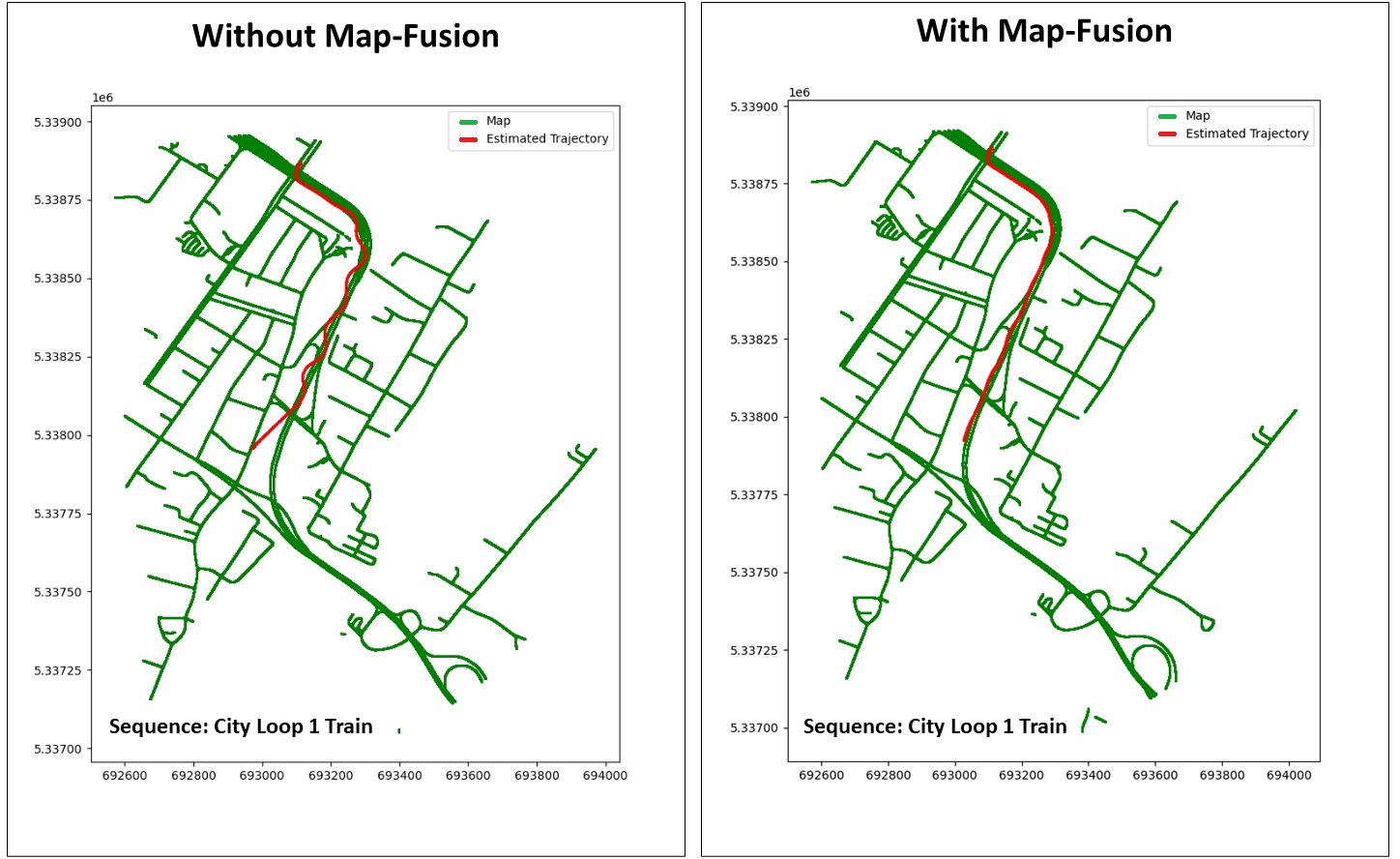
GPS-based vehicle localization and tracking suffers from unstable positional information commonly experienced in tunnel segments and in dense urban areas. Also, both Visual Odometry (VO) and Visual Inertial Odometry (VIO) are susceptible to adverse weather conditions that causes occlusions or blur on the visual input. In this paper, we propose a novel approach for vehicle localization that uses street network based map information to correct drifting odometry estimates and intermittent GPS measurements especially, in adversarial scenarios such as driving in rain and tunnels. Specifically, our approach is a flexible fusion algorithm that integrates intermittent GPS, drifting IMU and VO estimates together with 2D map information for robust vehicle localization and tracking. We refer to our approach as Map-Fusion. We robustly evaluate our proposed approach on four geographically diverse datasets from different countries ranging across clear and rain weather conditions. These datasets also include challenging visual segments in tunnels and underpasses. We show that with the integration of the map information, our Map-Fusion algorithm reduces the error of the state-of-the-art VO and VIO approaches across all datasets. We also validate our proposed algorithm in a real-world environment and in real-time on a hardware constrained mobile robot. Map-Fusion achieved 2.46m error in clear weather and 6.05m error in rain weather for a 150m route.
Read more9/4/2024

0
Is That Rain? Understanding Effects on Visual Odometry Performance for Autonomous UAVs and Efficient DNN-based Rain Classification at the Edge
Andrea Albanese, Yanran Wang, Davide Brunelli, David Boyle
The development of safe and reliable autonomous unmanned aerial vehicles relies on the ability of the system to recognise and adapt to changes in the local environment based on sensor inputs. State-of-the-art local tracking and trajectory planning are typically performed using camera sensor input to the flight control algorithm, but the extent to which environmental disturbances like rain affect the performance of these systems is largely unknown. In this paper, we first describe the development of an open dataset comprising ~335k images to examine these effects for seven different classes of precipitation conditions and show that a worst-case average tracking error of 1.5 m is possible for a state-of-the-art visual odometry system (VINS-Fusion). We then use the dataset to train a set of deep neural network models suited to mobile and constrained deployment scenarios to determine the extent to which it may be possible to efficiently and accurately classify these `rainy' conditions. The most lightweight of these models (MobileNetV3 small) can achieve an accuracy of 90% with a memory footprint of just 1.28 MB and a frame rate of 93 FPS, which is suitable for deployment in resource-constrained and latency-sensitive systems. We demonstrate a classification latency in the order of milliseconds using typical flight computer hardware. Accordingly, such a model can feed into the disturbance estimation component of an autonomous flight controller. In addition, data from unmanned aerial vehicles with the ability to accurately determine environmental conditions in real time may contribute to developing more granular timely localised weather forecasting.
Read more7/18/2024
0
Self-Supervised Geometry-Guided Initialization for Robust Monocular Visual Odometry
Takayuki Kanai, Igor Vasiljevic, Vitor Guizilini, Kazuhiro Shintani
Monocular visual odometry is a key technology in a wide variety of autonomous systems. Relative to traditional feature-based methods, that suffer from failures due to poor lighting, insufficient texture, large motions, etc., recent learning-based SLAM methods exploit iterative dense bundle adjustment to address such failure cases and achieve robust accurate localization in a wide variety of real environments, without depending on domain-specific training data. However, despite its potential, learning-based SLAM still struggles with scenarios involving large motion and object dynamics. In this paper, we diagnose key weaknesses in a popular learning-based SLAM model (DROID-SLAM) by analyzing major failure cases on outdoor benchmarks and exposing various shortcomings of its optimization process. We then propose the use of self-supervised priors leveraging a frozen large-scale pre-trained monocular depth estimation to initialize the dense bundle adjustment process, leading to robust visual odometry without the need to fine-tune the SLAM backbone. Despite its simplicity, our proposed method demonstrates significant improvements on KITTI odometry, as well as the challenging DDAD benchmark. Code and pre-trained models will be released upon publication.
Read more6/4/2024