Iterative approach to reconstructing neural disparity fields from light-field data

0
Sign in to get full access
Overview
- This paper presents an iterative approach to reconstructing neural disparity fields from light-field data.
- Disparity estimation is a crucial task for depth perception and 3D reconstruction in computer vision.
- The proposed method uses a neural network to predict a disparity field from a light-field input, which is then iteratively refined to improve the reconstruction.
Plain English Explanation
The paper describes a technique for reconstructing neural disparity fields from light-field data. Disparity refers to the difference in the position of an object as seen from two different viewpoints, which can be used to estimate the depth or distance of the object.
The researchers developed a neural network that can take a light-field - a collection of images captured from slightly different angles - and predict a "disparity field" that represents the depth information in the scene. This disparity field is then iteratively refined to improve the accuracy of the depth reconstruction.
The key idea is to use the light-field data to better estimate the depth of objects in the scene, which has important applications in 3D reconstruction, virtual reality, and autonomous navigation, among others.
Technical Explanation
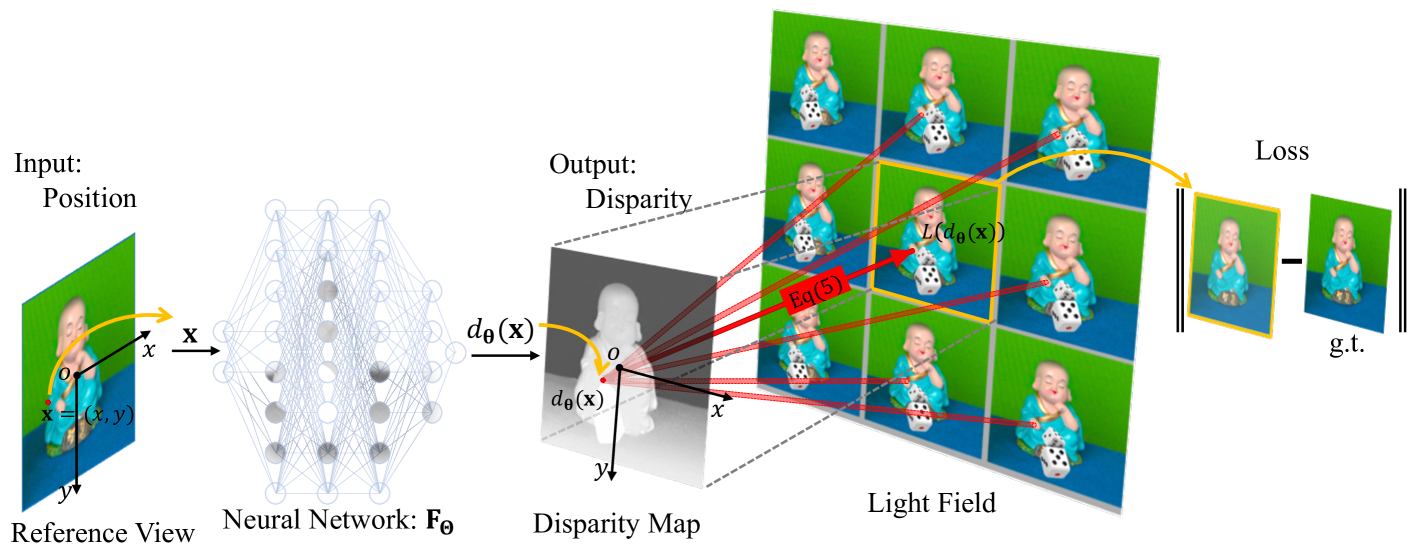
The paper presents an iterative approach to reconstructing neural disparity fields from light-field data. The method starts by using a neural network to predict an initial disparity field from the input light-field. This disparity field is then iteratively refined by comparing the predicted disparity to the actual disparity observed in the light-field data, and updating the network accordingly.
The key components of the proposed approach are:
- Light-field Encoder: A convolutional neural network that takes a light-field as input and produces an initial disparity field prediction.
- Iterative Refinement: The predicted disparity field is compared to the actual disparities observed in the light-field, and the network is updated to reduce the error.
- Loss Function: The network is trained using a combination of photometric and geometric losses to ensure the predicted disparity field accurately matches the observed light-field data.
Through extensive experiments, the authors demonstrate that their iterative approach can reconstruct high-quality disparity fields from light-field inputs, outperforming previous methods. The refined disparity fields have applications in depth estimation, 3D reconstruction, and other computer vision tasks.
Critical Analysis
The paper presents a novel and well-designed approach to reconstructing neural disparity fields from light-field data. The iterative refinement process is a key strength, as it allows the network to continuously improve its predictions based on the observed data.
One potential limitation is the reliance on high-quality light-field input data, which may not always be available in practical applications. The authors acknowledge this and suggest exploring ways to adapt the method to work with more diverse or incomplete light-field data.
Additionally, the paper does not provide a detailed discussion of the computational complexity or runtime performance of the proposed approach. As real-time applications may require fast inference, further analysis of the method's efficiency would be valuable.
Overall, the research makes a significant contribution to the field of depth estimation and 3D reconstruction from light-field data, and the iterative refinement technique could be applicable to other computer vision tasks beyond the specific problem addressed in this paper.
Conclusion
This paper presents an innovative approach to reconstructing neural disparity fields from light-field data. By iteratively refining the initial disparity field prediction, the method is able to produce high-quality depth estimates that can be useful for a variety of computer vision applications, such as 3D reconstruction, virtual reality, and autonomous navigation. While the reliance on high-quality light-field input data is a potential limitation, the iterative refinement technique is a promising direction for further research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Iterative approach to reconstructing neural disparity fields from light-field data
Ligen Shi, Chang Liu, Xing Zhao, Jun Qiu
This study proposes a neural disparity field (NDF) that establishes an implicit, continuous representation of scene disparity based on a neural field and an iterative approach to address the inverse problem of NDF reconstruction from light-field data. NDF enables seamless and precise characterization of disparity variations in three-dimensional scenes and can discretize disparity at any arbitrary resolution, overcoming the limitations of traditional disparity maps that are prone to sampling errors and interpolation inaccuracies. The proposed NDF network architecture utilizes hash encoding combined with multilayer perceptrons to capture detailed disparities in texture levels, thereby enhancing its ability to represent the geometric information of complex scenes. By leveraging the spatial-angular consistency inherent in light-field data, a differentiable forward model to generate a central view image from the light-field data is developed. Based on the forward model, an optimization scheme for the inverse problem of NDF reconstruction using differentiable propagation operators is established. Furthermore, an iterative solution method is adopted to reconstruct the NDF in the optimization scheme, which does not require training datasets and applies to light-field data captured by various acquisition methods. Experimental results demonstrate that high-quality NDF can be reconstructed from light-field data using the proposed method. High-resolution disparity can be effectively recovered by NDF, demonstrating its capability for the implicit, continuous representation of scene disparities.
Read more7/23/2024
0
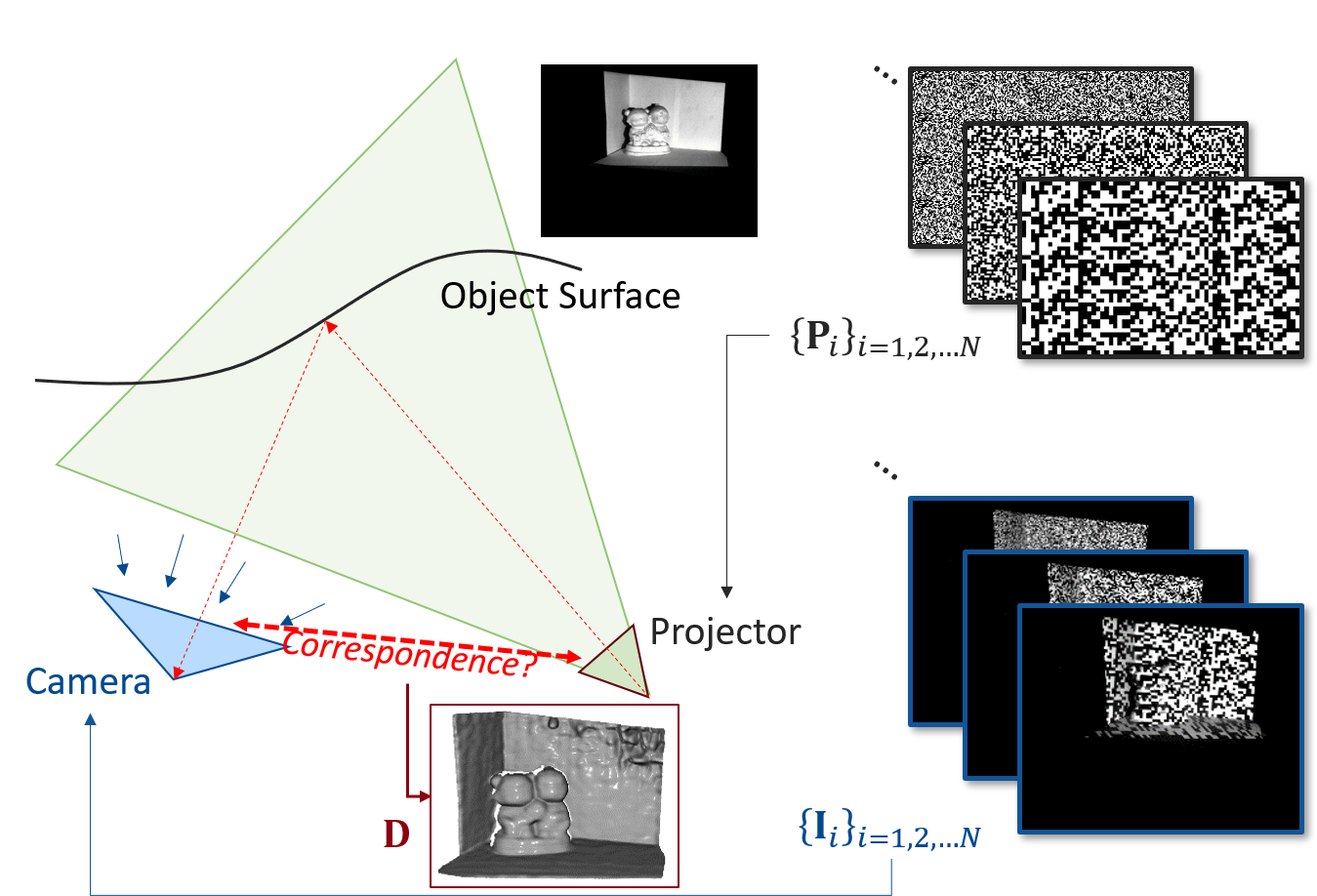
Depth Reconstruction with Neural Signed Distance Fields in Structured Light Systems
Rukun Qiao, Hiroshi Kawasaki, Hongbin Zha
We introduce a novel depth estimation technique for multi-frame structured light setups using neural implicit representations of 3D space. Our approach employs a neural signed distance field (SDF), trained through self-supervised differentiable rendering. Unlike passive vision, where joint estimation of radiance and geometry fields is necessary, we capitalize on known radiance fields from projected patterns in structured light systems. This enables isolated optimization of the geometry field, ensuring convergence and network efficacy with fixed device positioning. To enhance geometric fidelity, we incorporate an additional color loss based on object surfaces during training. Real-world experiments demonstrate our method's superiority in geometric performance for few-shot scenarios, while achieving comparable results with increased pattern availability.
Read more5/21/2024
0
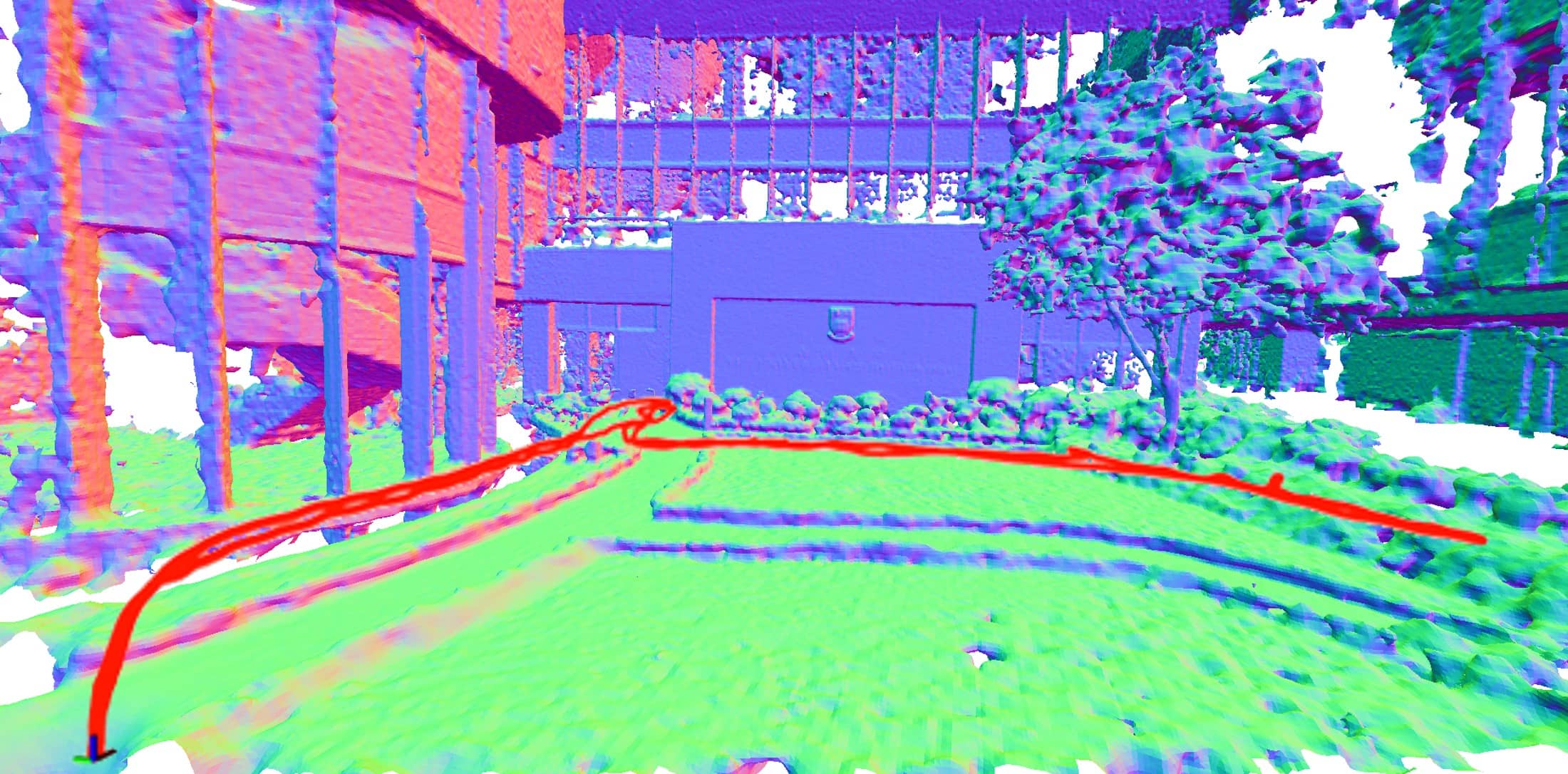
Neural Surface Reconstruction and Rendering for LiDAR-Visual Systems
Jianheng Liu, Chunran Zheng, Yunfei Wan, Bowen Wang, Yixi Cai, Fu Zhang
This paper presents a unified surface reconstruction and rendering framework for LiDAR-visual systems, integrating Neural Radiance Fields (NeRF) and Neural Distance Fields (NDF) to recover both appearance and structural information from posed images and point clouds. We address the structural visible gap between NeRF and NDF by utilizing a visible-aware occupancy map to classify space into the free, occupied, visible unknown, and background regions. This classification facilitates the recovery of a complete appearance and structure of the scene. We unify the training of the NDF and NeRF using a spatial-varying scale SDF-to-density transformation for levels of detail for both structure and appearance. The proposed method leverages the learned NDF for structure-aware NeRF training by an adaptive sphere tracing sampling strategy for accurate structure rendering. In return, NeRF further refines structural in recovering missing or fuzzy structures in the NDF. Extensive experiments demonstrate the superior quality and versatility of the proposed method across various scenarios. To benefit the community, the codes will be released at url{https://github.com/hku-mars/M2Mapping}.
Read more9/10/2024
🧠
0
NC-SDF: Enhancing Indoor Scene Reconstruction Using Neural SDFs with View-Dependent Normal Compensation
Ziyi Chen, Xiaolong Wu, Yu Zhang
State-of-the-art neural implicit surface representations have achieved impressive results in indoor scene reconstruction by incorporating monocular geometric priors as additional supervision. However, we have observed that multi-view inconsistency between such priors poses a challenge for high-quality reconstructions. In response, we present NC-SDF, a neural signed distance field (SDF) 3D reconstruction framework with view-dependent normal compensation (NC). Specifically, we integrate view-dependent biases in monocular normal priors into the neural implicit representation of the scene. By adaptively learning and correcting the biases, our NC-SDF effectively mitigates the adverse impact of inconsistent supervision, enhancing both the global consistency and local details in the reconstructions. To further refine the details, we introduce an informative pixel sampling strategy to pay more attention to intricate geometry with higher information content. Additionally, we design a hybrid geometry modeling approach to improve the neural implicit representation. Experiments on synthetic and real-world datasets demonstrate that NC-SDF outperforms existing approaches in terms of reconstruction quality.
Read more5/2/2024