Probabilistic Directed Distance Fields for Ray-Based Shape Representations

0
🌿
Sign in to get full access
Overview
- The paper explores a novel neural shape representation called Directed Distance Fields (DDFs) for computer vision tasks.
- DDFs map oriented points (position and direction) to surface visibility and depth, enabling efficient differentiable rendering and extraction of differential geometric quantities.
- The authors also introduce Probabilistic DDFs (PDDFs) to model inherent discontinuities in the underlying field.
- DDFs are applied to various applications, including single-shape fitting, generative modeling, and single-image 3D reconstruction, with strong performance.
- The paper also investigates the theoretical constraints necessary for view consistency in DDFs.
Plain English Explanation
In the world of computer vision, researchers are constantly searching for the best way to represent 3D shapes. One key operation used in many of these approaches is differentiable rendering. This allows them to "invert" the rendering process, using machine learning to reconstruct 3D shapes from 2D images.
Traditional 3D shape representations, like voxels, point clouds, and meshes, are relatively easy to render, but they can struggle to capture the full fidelity of the 3D shape. On the other hand, implicit representations, like occupancy or distance fields, can preserve more detail, but they often have complex or inefficient rendering processes.
The researchers in this paper have developed a new representation called Directed Distance Fields (DDFs). DDFs map an "oriented point" (a point with a direction) to information about the surface, like its visibility and depth. This enables fast, differentiable rendering, as well as the ability to extract other useful geometric properties, like surface normals.
The paper also introduces Probabilistic DDFs (PDDFs), which can model the inherent discontinuities in the underlying 3D shape. The authors then demonstrate how DDFs and PDDFs can be applied to various computer vision tasks, like 3D reconstruction and shape generation, with impressive results.
Finally, the paper explores the theoretical constraints necessary to ensure that DDFs are "view-consistent" - meaning that the 3D shape they represent looks the same from different viewpoints. This is an important property for many real-world applications.
Technical Explanation
The core innovation in this paper is the Directed Distance Field (DDF) representation. DDFs map an "oriented point" (a point in 3D space with an associated direction) to information about the surface, including its visibility and depth. This enables efficient, differentiable rendering, as well as the ability to extract other useful geometric quantities, like surface normals, with just a few additional backward passes.
The authors also introduce Probabilistic DDFs (PDDFs), which extend the basic DDF formulation to better model the inherent discontinuities in the underlying 3D shape. PDDFs represent the surface as a probabilistic field, capturing the uncertainty in the surface location.
The paper then demonstrates the versatility of DDFs and PDDFs by applying them to several computer vision tasks, including:
- Single-shape fitting: Fitting a DDF or PDDF to a given 3D shape, enabling efficient and differentiable processing.
- Generative modeling: Using DDFs and PDDFs as the representation in a generative model for 3D shapes.
- Single-image 3D reconstruction: Reconstructing a 3D shape from a single input image by learning to predict the corresponding DDF or PDDF.
The authors show that DDFs and PDDFs achieve strong performance in these tasks, using relatively simple neural network architectures, thanks to the versatility of the representation.
Finally, the paper conducts a theoretical investigation into the constraints necessary for DDFs to be "view-consistent" - meaning that the 3D shape they represent looks the same from different viewpoints. The authors identify a small set of field properties that are sufficient to guarantee view consistency, without needing to know the specific shape being represented.
Critical Analysis
The paper presents a novel and promising approach to 3D shape representation with DDFs and PDDFs. The key advantage of these representations is their ability to enable efficient, differentiable rendering and geometric quantity extraction, which is crucial for many inverse graphics applications in computer vision.
One potential limitation of the DDF representation is that its dimensionality can lead to view-dependent geometric artifacts. While the authors provide a theoretical analysis of the constraints necessary for view consistency, it would be interesting to see further empirical evaluation of this issue and how it impacts the performance of DDFs in practical applications.
Additionally, the paper focuses on demonstrating the versatility of DDFs and PDDFs across various tasks, but does not provide a detailed comparison to other state-of-the-art 3D shape representations. It would be helpful to see a more comprehensive benchmarking of DDFs and PDDFs against other approaches, to better understand their relative strengths and weaknesses.
Overall, the paper presents a novel and promising direction in 3D shape representation, with a strong theoretical foundation and promising empirical results. Further research and evaluation of the approach, particularly in terms of view consistency and comparison to other methods, could help solidify its position in the field of computer vision.
Conclusion
This paper introduces a novel neural shape representation called Directed Distance Fields (DDFs) and its probabilistic extension, Probabilistic DDFs (PDDFs). DDFs enable efficient, differentiable rendering and the extraction of useful geometric quantities, while PDDFs can better model the inherent discontinuities in 3D shapes.
The authors demonstrate the versatility of DDFs and PDDFs by applying them to several computer vision tasks, including single-shape fitting, generative modeling, and single-image 3D reconstruction. The strong performance of these representations, using relatively simple neural network architectures, highlights their potential for various real-world applications.
Additionally, the paper provides a theoretical investigation into the constraints necessary for view consistency in DDFs, an important property for many practical use cases. This analysis lays the groundwork for further research to address the potential view-dependent artifacts that can arise due to the high-dimensional nature of the DDF representation.
Overall, the Directed Distance Field representation introduced in this paper represents a promising step forward in the quest for an optimal 3D shape representation for computer vision tasks, with the potential to enable more efficient and robust approaches to inverse graphics and 3D reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🌿
0
Probabilistic Directed Distance Fields for Ray-Based Shape Representations
Tristan Aumentado-Armstrong, Stavros Tsogkas, Sven Dickinson, Allan Jepson
In modern computer vision, the optimal representation of 3D shape continues to be task-dependent. One fundamental operation applied to such representations is differentiable rendering, as it enables inverse graphics approaches in learning frameworks. Standard explicit shape representations (voxels, point clouds, or meshes) are often easily rendered, but can suffer from limited geometric fidelity, among other issues. On the other hand, implicit representations (occupancy, distance, or radiance fields) preserve greater fidelity, but suffer from complex or inefficient rendering processes, limiting scalability. In this work, we devise Directed Distance Fields (DDFs), a novel neural shape representation that builds upon classical distance fields. The fundamental operation in a DDF maps an oriented point (position and direction) to surface visibility and depth. This enables efficient differentiable rendering, obtaining depth with a single forward pass per pixel, as well as differential geometric quantity extraction (e.g., surface normals), with only additional backward passes. Using probabilistic DDFs (PDDFs), we show how to model inherent discontinuities in the underlying field. We then apply DDFs to several applications, including single-shape fitting, generative modelling, and single-image 3D reconstruction, showcasing strong performance with simple architectural components via the versatility of our representation. Finally, since the dimensionality of DDFs permits view-dependent geometric artifacts, we conduct a theoretical investigation of the constraints necessary for view consistency. We find a small set of field properties that are sufficient to guarantee a DDF is consistent, without knowing, for instance, which shape the field is expressing.
Read more4/16/2024
0
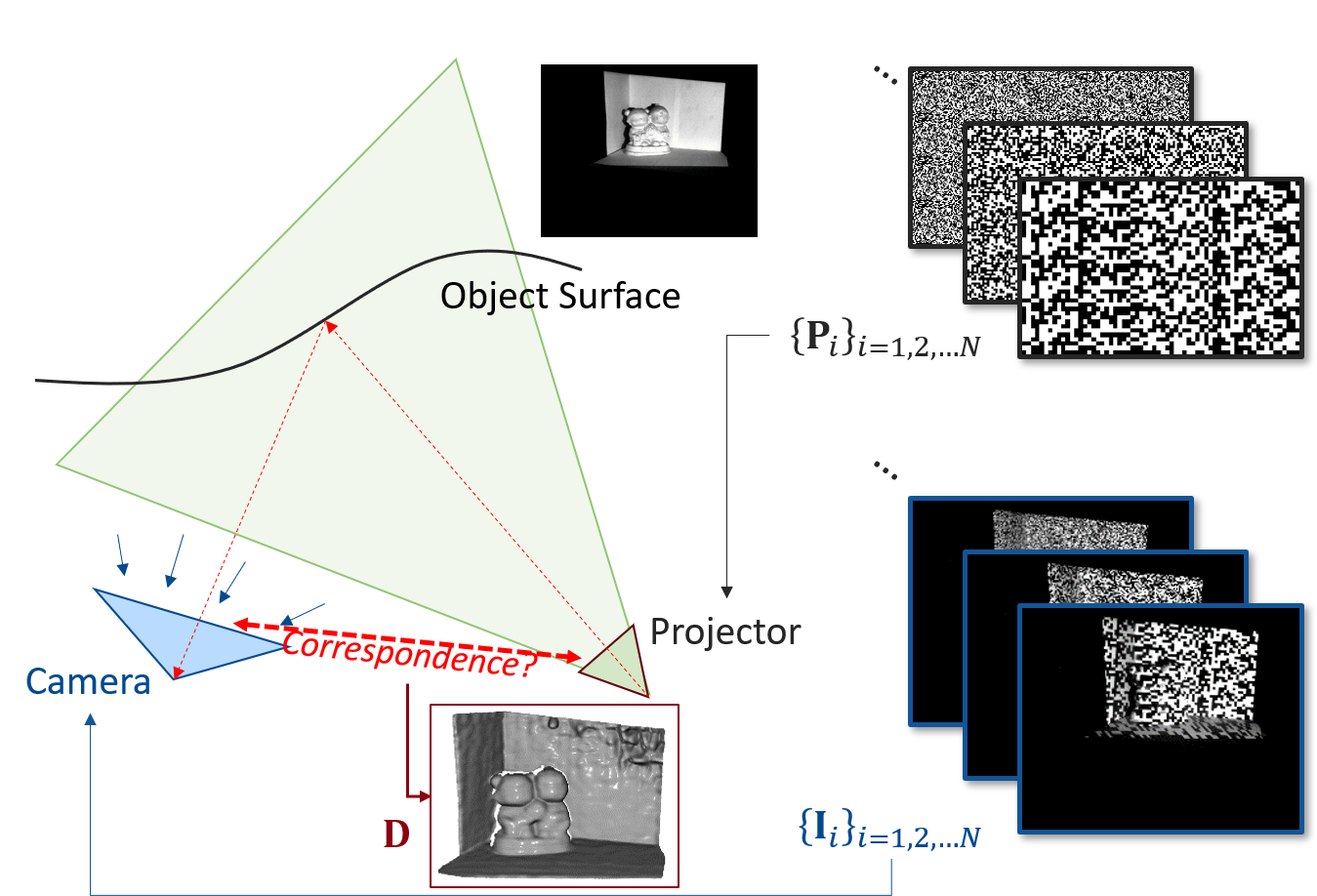
Depth Reconstruction with Neural Signed Distance Fields in Structured Light Systems
Rukun Qiao, Hiroshi Kawasaki, Hongbin Zha
We introduce a novel depth estimation technique for multi-frame structured light setups using neural implicit representations of 3D space. Our approach employs a neural signed distance field (SDF), trained through self-supervised differentiable rendering. Unlike passive vision, where joint estimation of radiance and geometry fields is necessary, we capitalize on known radiance fields from projected patterns in structured light systems. This enables isolated optimization of the geometry field, ensuring convergence and network efficacy with fixed device positioning. To enhance geometric fidelity, we incorporate an additional color loss based on object surfaces during training. Real-world experiments demonstrate our method's superiority in geometric performance for few-shot scenarios, while achieving comparable results with increased pattern availability.
Read more5/21/2024
🤯
0
Configuration Space Distance Fields for Manipulation Planning
Yiming Li, Xuemin Chi, Amirreza Razmjoo, Sylvain Calinon
The signed distance field is a popular implicit shape representation in robotics, providing geometric information about objects and obstacles in a form that can easily be combined with control, optimization and learning techniques. Most often, SDFs are used to represent distances in task space, which corresponds to the familiar notion of distances that we perceive in our 3D world. However, SDFs can mathematically be used in other spaces, including robot configuration spaces. For a robot manipulator, this configuration space typically corresponds to the joint angles for each articulation of the robot. While it is customary in robot planning to express which portions of the configuration space are free from collision with obstacles, it is less common to think of this information as a distance field in the configuration space. In this paper, we demonstrate the potential of considering SDFs in the robot configuration space for optimization, which we call the configuration space distance field. Similarly to the use of SDF in task space, CDF provides an efficient joint angle distance query and direct access to the derivatives. Most approaches split the overall computation with one part in task space followed by one part in configuration space. Instead, CDF allows the implicit structure to be leveraged by control, optimization, and learning problems in a unified manner. In particular, we propose an efficient algorithm to compute and fuse CDFs that can be generalized to arbitrary scenes. A corresponding neural CDF representation using multilayer perceptrons is also presented to obtain a compact and continuous representation while improving computation efficiency. We demonstrate the effectiveness of CDF with planar obstacle avoidance examples and with a 7-axis Franka robot in inverse kinematics and manipulation planning tasks.
Read more6/4/2024
0
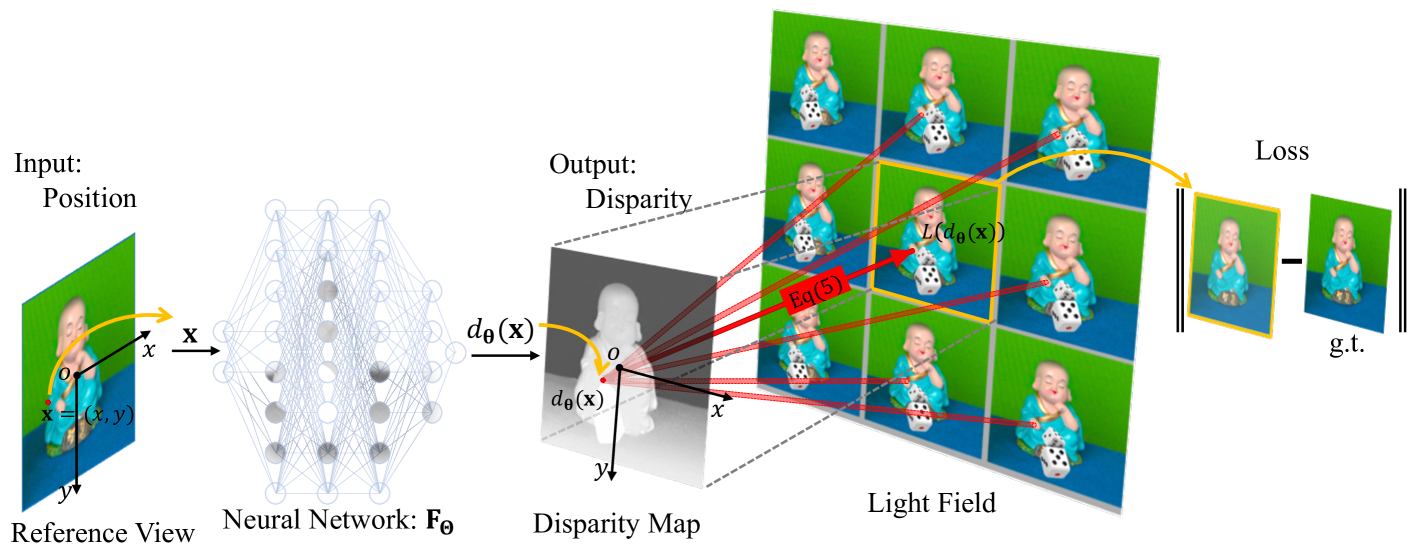
Iterative approach to reconstructing neural disparity fields from light-field data
Ligen Shi, Chang Liu, Xing Zhao, Jun Qiu
This study proposes a neural disparity field (NDF) that establishes an implicit, continuous representation of scene disparity based on a neural field and an iterative approach to address the inverse problem of NDF reconstruction from light-field data. NDF enables seamless and precise characterization of disparity variations in three-dimensional scenes and can discretize disparity at any arbitrary resolution, overcoming the limitations of traditional disparity maps that are prone to sampling errors and interpolation inaccuracies. The proposed NDF network architecture utilizes hash encoding combined with multilayer perceptrons to capture detailed disparities in texture levels, thereby enhancing its ability to represent the geometric information of complex scenes. By leveraging the spatial-angular consistency inherent in light-field data, a differentiable forward model to generate a central view image from the light-field data is developed. Based on the forward model, an optimization scheme for the inverse problem of NDF reconstruction using differentiable propagation operators is established. Furthermore, an iterative solution method is adopted to reconstruct the NDF in the optimization scheme, which does not require training datasets and applies to light-field data captured by various acquisition methods. Experimental results demonstrate that high-quality NDF can be reconstructed from light-field data using the proposed method. High-resolution disparity can be effectively recovered by NDF, demonstrating its capability for the implicit, continuous representation of scene disparities.
Read more7/23/2024