Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments

0
Sign in to get full access
Overview
- This paper presents a method for kinodynamic motion planning for a team of multirotors transporting a cable-suspended payload in cluttered environments.
- The key contributions include a novel optimization-based motion planning algorithm and experimental results demonstrating the system's performance.
- The research aims to enable the safe and efficient transportation of cable-suspended payloads using teams of aerial robots.
Plain English Explanation
This research focuses on developing a system that allows a team of drones, or multirotors, to safely and efficiently transport a payload that is suspended by cables. The payload might be a heavy object or fragile item that the drones need to move through a cluttered environment, like a crowded room or outdoors with obstacles.
The researchers created a new motion planning algorithm that takes into account the complex dynamics of the cable-suspended payload as the drones move. This optimization-based approach allows the team of drones to plan paths that avoid collisions with obstacles while also minimizing the strain and swinging of the payload.
Through experiments, the researchers demonstrate that their system can successfully navigate the drones and payload through cluttered environments. This could enable a variety of applications, such as delivering heavy or delicate items to hard-to-reach locations, or assisting in disaster response and search-and-rescue operations.
The key innovation is the ability to plan motions that account for the challenging dynamics of the cable-suspended payload, rather than treating it as a rigid object. This allows the drones to transport payloads more safely and efficiently compared to previous approaches.
Technical Explanation
The paper presents a kinodynamic motion planning algorithm for coordinating a team of multirotors to transport a cable-suspended payload through cluttered environments.
The researchers develop a novel optimization-based motion planning approach that considers the nonlinear dynamics of the cable-suspended payload. This allows the team of drones to plan collision-free trajectories while minimizing the swing and strain on the payload.
The key technical contributions include:
- A dynamic model that captures the complex interactions between the drones, cables, and payload.
- An optimization-based motion planning algorithm that generates dynamically feasible trajectories for the drones and payload.
- Experimental results demonstrating the system's ability to transport cable-suspended payloads through cluttered environments.
The researchers validate their approach through simulations and real-world experiments, showcasing the system's effectiveness in navigating obstacles while maintaining stable control of the payload.
Critical Analysis
The paper presents a thorough and well-designed study, addressing an important challenge in the field of aerial robotics. The researchers have carefully modeled the complex dynamics of the cable-suspended payload and developed an optimization-based motion planning algorithm to handle these challenges.
One potential limitation is the assumption of perfect state estimation and control of the drones and payload. In real-world situations, there may be uncertainties and disturbances that could affect the system's performance. The authors acknowledge this and suggest future work to address these issues, such as incorporating feedback control and robust optimization techniques.
Additionally, the paper focuses on the motion planning aspect and does not delve deeply into the control strategies for the individual drones. Further research could explore how the control of the drones can be integrated with the motion planning to enhance the overall system's robustness and reliability.
While the experimental results are promising, it would be valuable to see the system tested in even more challenging and realistic scenarios, such as dynamic environments with moving obstacles or payload disturbances. This could help validate the system's applicability to real-world applications.
Conclusion
This paper presents a novel kinodynamic motion planning algorithm for a team of multirotors transporting a cable-suspended payload in cluttered environments. The researchers have made significant contributions by modeling the complex dynamics of the cable-suspended payload and developing an optimization-based planning approach to navigate obstacles while maintaining payload stability.
The experimental results demonstrate the system's effectiveness, suggesting that this technology could enable a wide range of applications, from delivering fragile or heavy items to assisting in disaster response and search-and-rescue operations. Further research to address real-world uncertainties and integrate advanced control strategies could further enhance the system's capabilities and robustness.
Overall, this work represents an important step forward in the field of aerial robotics, paving the way for more sophisticated and versatile systems capable of safely and efficiently transporting payloads in challenging environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Kinodynamic Motion Planning for a Team of Multirotors Transporting a Cable-Suspended Payload in Cluttered Environments
Khaled Wahba, Joaquim Ortiz-Haro, Marc Toussaint, Wolfgang Honig
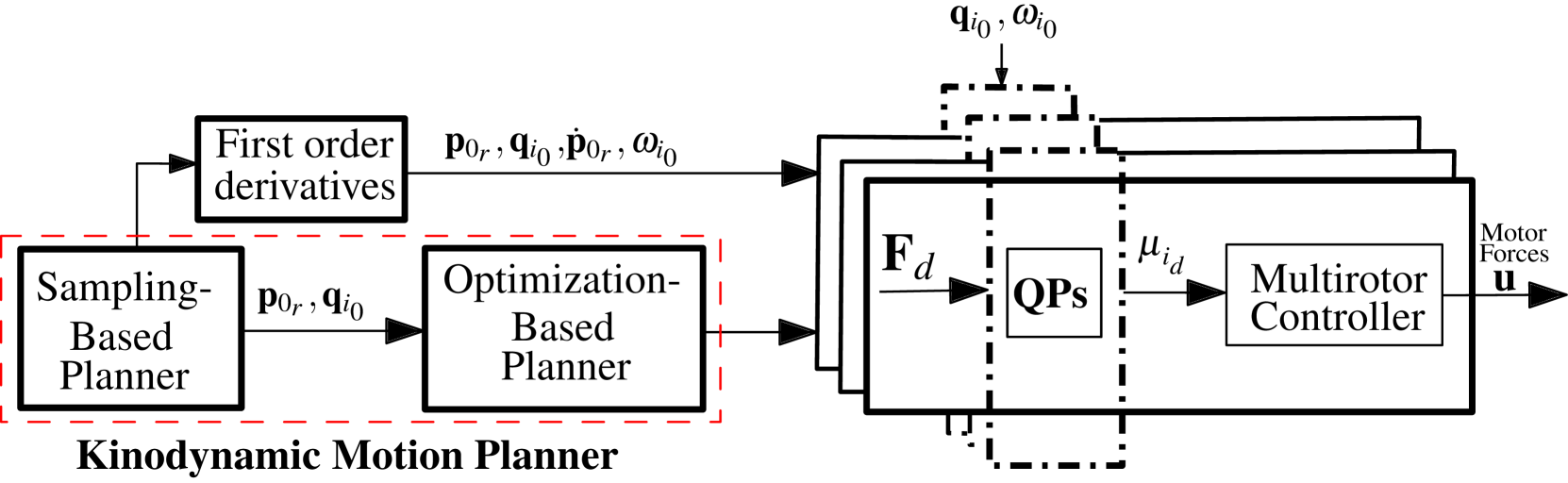
We propose a motion planner for cable-driven payload transportation using multiple unmanned aerial vehicles (UAVs) in an environment cluttered with obstacles. Our planner is kinodynamic, i.e., it considers the full dynamics model of the transporting system including actuation constraints. Due to the high dimensionality of the planning problem, we use a hierarchical approach where we first solve the geometric motion planning using a sampling-based method with a novel sampler, followed by constrained trajectory optimization that considers the full dynamics of the system. Both planning stages consider inter-robot and robot/obstacle collisions. We demonstrate in a software-in-the-loop simulation and real flight experiments that there is a significant benefit in kinodynamic motion planning for such payload transport systems with respect to payload tracking error and energy consumption compared to the standard methods of planning for the payload alone. Notably, we observe a significantly higher success rate in scenarios where the team formation changes are needed to move through tight spaces.
Read more10/2/2024

0
Kinodynamic Motion Planning for Collaborative Object Transportation by Multiple Mobile Manipulators
Keshab Patra, Arpita Sinha, Anirban Guha
This work proposes a kinodynamic motion planning technique for collaborative object transportation by multiple mobile manipulators in dynamic environments. A global path planner computes a linear piecewise path from start to goal. A novel algorithm detects the narrow regions between the static obstacles and aids in defining the obstacle-free region to enhance the feasibility of the global path. We then formulate a local online motion planning technique for trajectory generation that minimizes the control efforts in a receding horizon manner. It plans the trajectory for finite time horizons, considering the kinodynamic constraints and the static and dynamic obstacles. The planning technique jointly plans for the mobile bases and the arms to utilize the locomotion capability of the mobile base and the manipulation capability of the arm efficiently. We use a convex cone approach to avoid self-collision of the formation by modifying the mobile manipulators admissible state without imposing additional constraints. Numerical simulations and hardware experiments showcase the efficiency of the proposed approach.
Read more9/24/2024

0
Hybrid Dynamics Modeling and Trajectory Planning for a Cable-Trailer System with a Quadruped Robot
Wentao Zhang, Shaohang Xu, Gewei Zuo, Lijun Zhu
Inspired by the utilization of dogs in sled-pulling for transportation, we introduce a cable-trailer system with a quadruped robot. The motion planning of the proposed robot system presents challenges arising from the nonholonomic constraints of the trailer, system underactuation, and hybrid interaction through the cable. To tackle these challenges, we develop a hybrid dynamics model that accounts for the cable's taut/slack status. Since it is computationally intense to directly optimize the trajectory, we first propose a search algorithm to compute a sub-optimal trajectory as the initial solution. Then, a novel collision avoidance constraint based on the geometric shapes of objects is proposed to formulate the trajectory optimization problem for the hybrid system. The proposed trajectory planning method is implemented on a Unitree A1 quadruped robot with a customized cable-trailer and validated through experiments.
Read more4/19/2024
💬
0
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
Read more5/21/2024