A Structure-Aware Lane Graph Transformer Model for Vehicle Trajectory Prediction

0
Sign in to get full access
Overview
- Presents a novel "Structure-Aware Lane Graph Transformer Model" for vehicle trajectory prediction
- Leverages the structure of road lanes and intersections to improve trajectory forecasting
- Employs a transformer-based architecture to capture complex spatial-temporal relationships
- Demonstrates state-of-the-art performance on benchmark datasets
Plain English Explanation
This paper introduces a new machine learning model for predicting the future paths of vehicles on roads. The key idea is to take into account the structure-aware lane graph - the layout of the roads, lanes, and intersections - when making these predictions.
The model uses a transformer-based architecture to analyze the current position and movement of a vehicle, as well as understand the context of the surrounding road network. This allows it to better anticipate how the vehicle will likely navigate through the environment in the near future.
Compared to previous approaches, this "structure-aware" model demonstrates improved accuracy in forecasting vehicle trajectories on standard benchmark datasets. The authors argue that explicitly modeling the road layout provides valuable information that helps the AI system make more reliable predictions.
Technical Explanation
The core of the proposed model is a lane graph transformer. This takes the current state of a vehicle (position, velocity, etc.) and embeds it into a vector representation. It then uses attention mechanisms to aggregate relevant information from the surrounding lane graph structure.
The lane graph encodes the topology of the road network, including the connectivity between lanes and intersections. By attending to this structural information, the model can better understand the constraints and affordances of the environment that will shape the vehicle's future trajectory.
The transformer architecture allows the model to capture complex spatial-temporal relationships in the vehicle's movement and the road network context. This is in contrast to earlier approaches that relied on more simplistic representations, such as grid-based maps or basic graph neural networks.
Experiments on popular benchmarks for vehicle trajectory forecasting demonstrate the effectiveness of the structure-aware lane graph transformer model, achieving state-of-the-art performance. The authors attribute this success to the model's ability to better capture the underlying road network topology and its influence on vehicle motion.
Critical Analysis
The paper makes a compelling case for the importance of explicitly modeling the road structure when predicting vehicle trajectories. The authors' experiments show clear performance improvements over prior methods, validating the core idea.
However, the paper does not explore the model's robustness to more challenging real-world conditions, such as partial observability, noisy sensor data, or dynamic changes in the road network. Further research would be needed to assess how well the structure-aware approach generalizes to these more realistic scenarios.
Additionally, the paper does not provide much insight into the interpretability or explainability of the model's predictions. Understanding why the model makes certain forecasts could be crucial for building trust and enabling human-AI collaboration in safety-critical autonomous driving applications.
Overall, this work represents an important step forward in vehicle trajectory prediction by leveraging the structural properties of road networks. Future research could build upon these ideas to develop even more robust and transparent AI systems for autonomous navigation.
Conclusion
The "Structure-Aware Lane Graph Transformer Model" presented in this paper offers a promising new approach to the problem of vehicle trajectory prediction. By explicitly modeling the topology of the road network, the model can make more accurate forecasts of how vehicles will navigate through their environment.
The transformer-based architecture allows the model to capture complex spatial-temporal relationships, going beyond simpler representations used in prior work. Experimental results demonstrate state-of-the-art performance on standard benchmarks, highlighting the value of this structure-aware perspective.
While further research is needed to assess the model's robustness and interpretability, this work represents an important advancement in the field of autonomous vehicle perception and planning. Incorporating knowledge of the road network structure is a key step towards building AI systems that can safely and reliably guide vehicles through the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Structure-Aware Lane Graph Transformer Model for Vehicle Trajectory Prediction
Sun Zhanbo, Dong Caiyin, Ji Ang, Zhao Ruibin, Zhao Yu
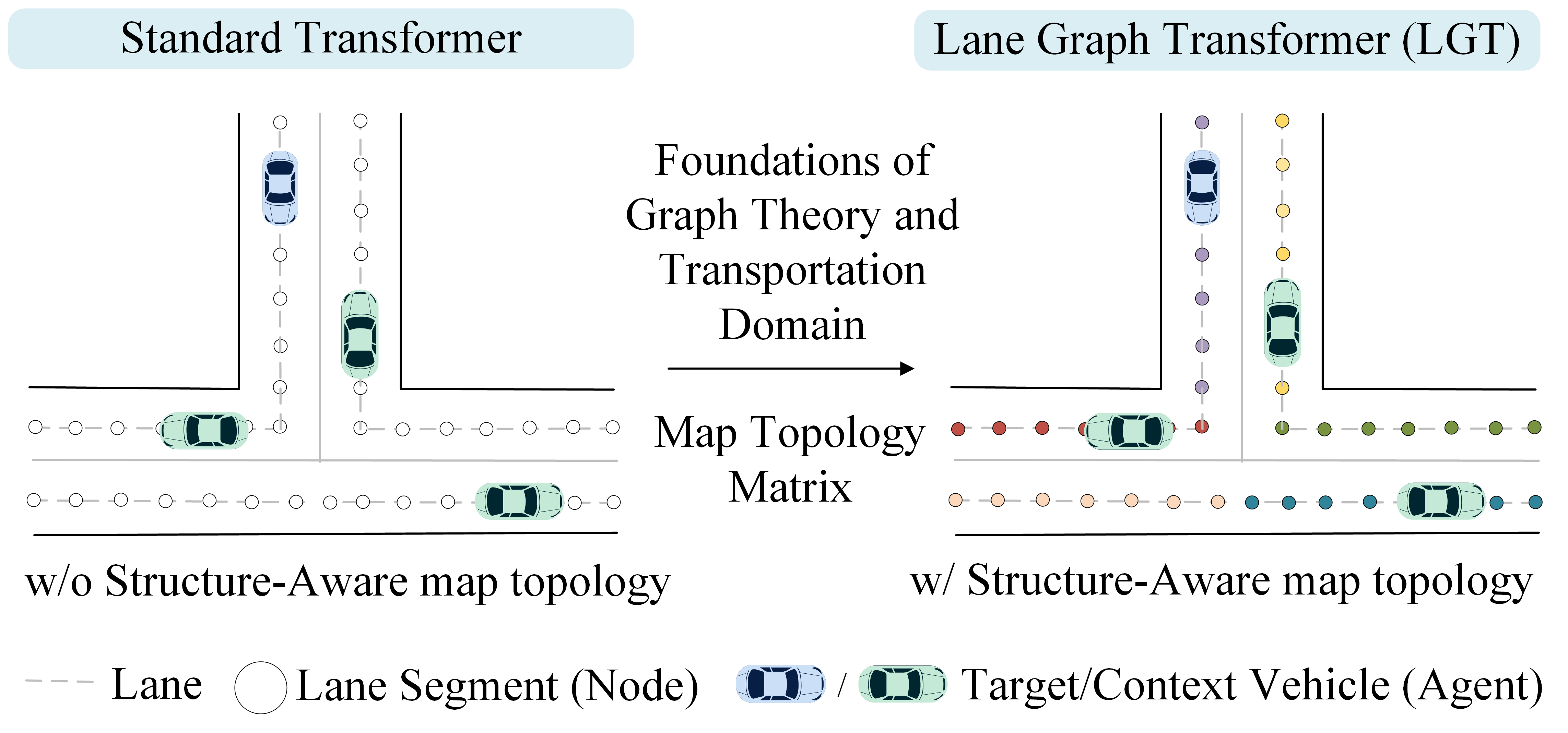
Accurate prediction of future trajectories for surrounding vehicles is vital for the safe operation of autonomous vehicles. This study proposes a Lane Graph Transformer (LGT) model with structure-aware capabilities. Its key contribution lies in encoding the map topology structure into the attention mechanism. To address variations in lane information from different directions, four Relative Positional Encoding (RPE) matrices are introduced to capture the local details of the map topology structure. Additionally, two Shortest Path Distance (SPD) matrices are employed to capture distance information between two accessible lanes. Numerical results indicate that the proposed LGT model achieves a significantly higher prediction performance on the Argoverse 2 dataset. Specifically, the minFDE$_6$ metric was decreased by 60.73% compared to the Argoverse 2 baseline model (Nearest Neighbor) and the b-minFDE$_6$ metric was reduced by 2.65% compared to the baseline LaneGCN model. Furthermore, ablation experiments demonstrated that the consideration of map topology structure led to a 4.24% drop in the b-minFDE$_6$ metric, validating the effectiveness of this model.
Read more5/31/2024

0
Learning Lane Graphs from Aerial Imagery Using Transformers
Martin Buchner, Simon Dorer, Abhinav Valada
The robust and safe operation of automated vehicles underscores the critical need for detailed and accurate topological maps. At the heart of this requirement is the construction of lane graphs, which provide essential information on lane connectivity, vital for navigating complex urban environments autonomously. While transformer-based models have been effective in creating map topologies from vehicle-mounted sensor data, their potential for generating such graphs from aerial imagery remains untapped. This work introduces a novel approach to generating successor lane graphs from aerial imagery, utilizing the advanced capabilities of transformer models. We frame successor lane graphs as a collection of maximal length paths and predict them using a Detection Transformer (DETR) architecture. We demonstrate the efficacy of our method through extensive experiments on the diverse and large-scale UrbanLaneGraph dataset, illustrating its accuracy in generating successor lane graphs and highlighting its potential for enhancing autonomous vehicle navigation in complex environments.
Read more7/9/2024

0
LMT-Net: Lane Model Transformer Network for Automated HD Mapping from Sparse Vehicle Observations
Michael Mink, Thomas Monninger, Steffen Staab
In autonomous driving, High Definition (HD) maps provide a complete lane model that is not limited by sensor range and occlusions. However, the generation and upkeep of HD maps involves periodic data collection and human annotations, limiting scalability. To address this, we investigate automating the lane model generation and the use of sparse vehicle observations instead of dense sensor measurements. For our approach, a pre-processing step generates polylines by aligning and aggregating observed lane boundaries. Aligned driven traces are used as starting points for predicting lane pairs defined by the left and right boundary points. We propose Lane Model Transformer Network (LMT-Net), an encoder-decoder neural network architecture that performs polyline encoding and predicts lane pairs and their connectivity. A lane graph is formed by using predicted lane pairs as nodes and predicted lane connectivity as edges. We evaluate the performance of LMT-Net on an internal dataset that consists of multiple vehicle observations as well as human annotations as Ground Truth (GT). The evaluation shows promising results and demonstrates superior performance compared to the implemented baseline on both highway and non-highway Operational Design Domain (ODD).
Read more9/20/2024

0
Navigating Spatio-Temporal Heterogeneity: A Graph Transformer Approach for Traffic Forecasting
Jianxiang Zhou, Erdong Liu, Wei Chen, Siru Zhong, Yuxuan Liang
Traffic forecasting has emerged as a crucial research area in the development of smart cities. Although various neural networks with intricate architectures have been developed to address this problem, they still face two key challenges: i) Recent advancements in network designs for modeling spatio-temporal correlations are starting to see diminishing returns in performance enhancements. ii) Additionally, most models do not account for the spatio-temporal heterogeneity inherent in traffic data, i.e., traffic distribution varies significantly across different regions and traffic flow patterns fluctuate across various time slots. To tackle these challenges, we introduce the Spatio-Temporal Graph Transformer (STGormer), which effectively integrates attribute and structure information inherent in traffic data for learning spatio-temporal correlations, and a mixture-of-experts module for capturing heterogeneity along spaital and temporal axes. Specifically, we design two straightforward yet effective spatial encoding methods based on the graph structure and integrate time position encoding into the vanilla transformer to capture spatio-temporal traffic patterns. Additionally, a mixture-of-experts enhanced feedforward neural network (FNN) module adaptively assigns suitable expert layers to distinct patterns via a spatio-temporal gating network, further improving overall prediction accuracy. Experiments on real-world traffic datasets demonstrate that STGormer achieves state-of-the-art performance.
Read more8/27/2024