Language-Guided World Models: A Model-Based Approach to AI Control

0

Sign in to get full access
Overview
- This paper presents a novel approach called "Language-Guided World Models" (LWMs) for building AI control systems.
- LWMs combine language understanding and world modeling to enable AI agents to learn about and navigate their environments more effectively.
- The key idea is to use language as a guide to help the agent build a more comprehensive internal model of the world.
Plain English Explanation
The paper introduces a new way to build AI systems that can understand and interact with the world around them more effectively. The core idea is to combine two important capabilities: language understanding and world modeling.
By giving the AI agent the ability to understand and reason about language, the researchers found they could help the agent build a more comprehensive mental model of its environment. This "language-guided world model" serves as a guide to help the agent plan its actions and navigate the world more effectively.
The key insight is that language provides a rich source of information about the world that can complement the agent's direct sensory experience. By learning to connect linguistic descriptions of the world to its internal model, the agent can develop a richer, more nuanced understanding of its surroundings.
This approach could have important implications for building AI systems that can operate more robustly and intelligently in complex, real-world environments. By grounding their understanding in both perceptual and linguistic data, these agents may be better equipped to learn and reason about the world in ways that are more natural and intuitive for humans.
Technical Explanation
The key innovation presented in this paper is the concept of "Language-Guided World Models" (LWMs). LWMs are a new approach to building AI control systems that combines language understanding and world modeling capabilities.
The core idea is to use language as a guide to help the AI agent construct a more comprehensive internal model of its environment. This is done by training the agent to associate linguistic descriptions of the world (e.g. from natural language instructions or dialogue) with its own perceptual experiences and internal state representations.
By learning these language-world correspondences, the agent can develop a richer, more nuanced mental model of its surroundings. This "language-guided" world model can then be used to help the agent plan its actions and navigate the environment more effectively.
The paper presents experiments demonstrating the effectiveness of this approach compared to more traditional world modeling techniques. The results show that LWMs can help agents learn faster, make more informed decisions, and achieve better outcomes in complex, goal-directed tasks.
The authors argue that this language-guided approach to world modeling is a promising direction for building AI systems that can operate more robustly and intelligently in the real world. By grounding their understanding in both perceptual and linguistic data, these agents may be better equipped to learn, reason, and communicate in ways that are more natural and intuitive for humans.
Critical Analysis
The research presented in this paper is an innovative and promising step towards more capable and flexible AI systems. The core idea of using language as a guide for building world models is well-motivated and the experimental results are compelling.
That said, the authors acknowledge several important limitations and areas for future work. For example, the current LWM approach relies on having access to high-quality language data that is well-aligned with the agent's perceptual experience. In more realistic settings, this alignment may be more challenging to achieve.
Additionally, the experiments focus on relatively simple, simulated environments. Scaling this approach to handle the full complexity of the real world will likely require significant further research and development. Issues around robustness, generalization, and sample efficiency will need to be carefully addressed.
Another potential concern is the degree to which the language-guided world model may introduce biases or distortions into the agent's understanding of the world. If the linguistic data reflects human biases or misconceptions, these could potentially get baked into the agent's internal representations.
Overall, the work represents an intriguing and important step forward, but much more research will be needed to fully realize the potential of language-guided world models for building capable and trustworthy AI systems. Continued critical analysis and empirical validation will be essential as this line of work progresses.
Conclusion
This paper presents a novel approach called "Language-Guided World Models" that combines language understanding and world modeling to enable more effective AI control systems. By using language as a guide to build richer internal representations of the environment, the agents in these systems can learn faster, make more informed decisions, and achieve better outcomes in complex tasks.
The key insight is that language provides a valuable source of information about the world that can complement an agent's direct sensory experience. By learning to associate linguistic descriptions with their internal state representations, the agents can develop a more comprehensive mental model of their surroundings.
While this research is still in the early stages, the results are promising and suggest that language-guided world models could be a fruitful direction for building AI systems that can operate more robustly and intelligently in the real world. Continued exploration of this approach, along with careful analysis of its limitations and potential biases, will be important next steps.
Overall, this work represents an exciting advance in the field of AI control systems and points the way towards more capable and flexible artificial agents that can better understand and interact with the world around them.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Language-Guided World Models: A Model-Based Approach to AI Control
Alex Zhang, Khanh Nguyen, Jens Tuyls, Albert Lin, Karthik Narasimhan
This paper introduces the concept of Language-Guided World Models (LWMs) -- probabilistic models that can simulate environments by reading texts. Agents equipped with these models provide humans with more extensive and efficient control, allowing them to simultaneously alter agent behaviors in multiple tasks via natural verbal communication. In this work, we take initial steps in developing robust LWMs that can generalize to compositionally novel language descriptions. We design a challenging world modeling benchmark based on the game of MESSENGER (Hanjie et al., 2021), featuring evaluation settings that require varying degrees of compositional generalization. Our experiments reveal the lack of generalizability of the state-of-the-art Transformer model, as it offers marginal improvements in simulation quality over a no-text baseline. We devise a more robust model by fusing the Transformer with the EMMA attention mechanism (Hanjie et al., 2021). Our model substantially outperforms the Transformer and approaches the performance of a model with an oracle semantic parsing and grounding capability. To demonstrate the practicality of this model in improving AI safety and transparency, we simulate a scenario in which the model enables an agent to present plans to a human before execution, and to revise plans based on their language feedback.
Read more9/6/2024
64
Can Language Models Serve as Text-Based World Simulators?
Ruoyao Wang, Graham Todd, Ziang Xiao, Xingdi Yuan, Marc-Alexandre C^ot'e, Peter Clark, Peter Jansen
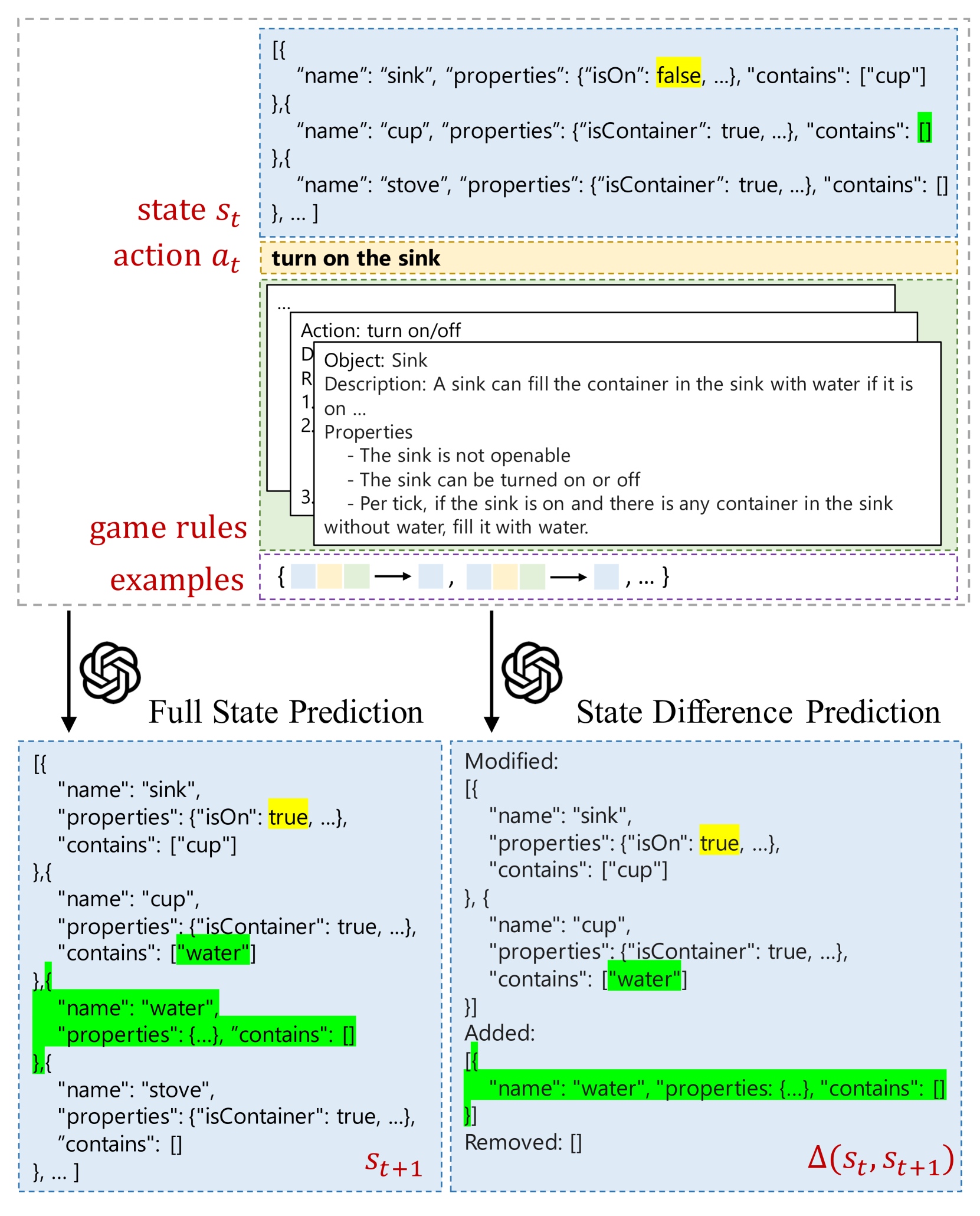
Virtual environments play a key role in benchmarking advances in complex planning and decision-making tasks but are expensive and complicated to build by hand. Can current language models themselves serve as world simulators, correctly predicting how actions change different world states, thus bypassing the need for extensive manual coding? Our goal is to answer this question in the context of text-based simulators. Our approach is to build and use a new benchmark, called ByteSized32-State-Prediction, containing a dataset of text game state transitions and accompanying game tasks. We use this to directly quantify, for the first time, how well LLMs can serve as text-based world simulators. We test GPT-4 on this dataset and find that, despite its impressive performance, it is still an unreliable world simulator without further innovations. This work thus contributes both new insights into current LLM's capabilities and weaknesses, as well as a novel benchmark to track future progress as new models appear.
Read more6/11/2024
📈
0
WorldGPT: Empowering LLM as Multimodal World Model
Zhiqi Ge, Hongzhe Huang, Mingze Zhou, Juncheng Li, Guoming Wang, Siliang Tang, Yueting Zhuang
World models are progressively being employed across diverse fields, extending from basic environment simulation to complex scenario construction. However, existing models are mainly trained on domain-specific states and actions, and confined to single-modality state representations. In this paper, We introduce WorldGPT, a generalist world model built upon Multimodal Large Language Model (MLLM). WorldGPT acquires an understanding of world dynamics through analyzing millions of videos across various domains. To further enhance WorldGPT's capability in specialized scenarios and long-term tasks, we have integrated it with a novel cognitive architecture that combines memory offloading, knowledge retrieval, and context reflection. As for evaluation, we build WorldNet, a multimodal state transition prediction benchmark encompassing varied real-life scenarios. Conducting evaluations on WorldNet directly demonstrates WorldGPT's capability to accurately model state transition patterns, affirming its effectiveness in understanding and predicting the dynamics of complex scenarios. We further explore WorldGPT's emerging potential in serving as a world simulator, helping multimodal agents generalize to unfamiliar domains through efficiently synthesising multimodal instruction instances which are proved to be as reliable as authentic data for fine-tuning purposes. The project is available on url{https://github.com/DCDmllm/WorldGPT}.
Read more4/30/2024
📈
0
Agent Planning with World Knowledge Model
Shuofei Qiao, Runnan Fang, Ningyu Zhang, Yuqi Zhu, Xiang Chen, Shumin Deng, Yong Jiang, Pengjun Xie, Fei Huang, Huajun Chen
Recent endeavors towards directly using large language models (LLMs) as agent models to execute interactive planning tasks have shown commendable results. Despite their achievements, however, they still struggle with brainless trial-and-error in global planning and generating hallucinatory actions in local planning due to their poor understanding of the ''real'' physical world. Imitating humans' mental world knowledge model which provides global prior knowledge before the task and maintains local dynamic knowledge during the task, in this paper, we introduce parametric World Knowledge Model (WKM) to facilitate agent planning. Concretely, we steer the agent model to self-synthesize knowledge from both expert and sampled trajectories. Then we develop WKM, providing prior task knowledge to guide the global planning and dynamic state knowledge to assist the local planning. Experimental results on three complex real-world simulated datasets with three state-of-the-art open-source LLMs, Mistral-7B, Gemma-7B, and Llama-3-8B, demonstrate that our method can achieve superior performance compared to various strong baselines. Besides, we analyze to illustrate that our WKM can effectively alleviate the blind trial-and-error and hallucinatory action issues, providing strong support for the agent's understanding of the world. Other interesting findings include: 1) our instance-level task knowledge can generalize better to unseen tasks, 2) weak WKM can guide strong agent model planning, and 3) unified WKM training has promising potential for further development. Code will be available at https://github.com/zjunlp/WKM.
Read more5/24/2024